产品搜索
当前位置:首页->同步带轮驱动结构、机器人驱动底座及桌面级机械臂
同步带轮驱动结构、机器人驱动底座及桌面级机械臂
【申请公布号:CN110948470A;申请权利人:深圳市越疆科技有限公司;发明设计人: 汪金星; 刘培超; 刘主福;】
摘要:
本发明提供一种同步带轮驱动结构、机器人驱动底座及桌面级机械臂,通过在基板上巧妙的布置步进电机、第一同步带轮、第二同步带轮、同步带、输出轴、编码器码盘以及编码器读头部空间关系,设置步进电机、第一同步带轮、第二同步带轮、同步带、输出轴传动结构,以及用于读取输出轴转动量的编码器码盘以及编码器读头部的结构设置,因为结构简单、没有过多的零件,使得结构集成度相对较低,且通过能够读取输出轴转动量保证控制精度,降低了材料成本、安装成本以及维护成本,有效提高了驱动结构的适用寿命。
主权项:
1.一种同步带轮驱动结构,其特征在于,包括:基板,所述基板构造有输出轴设置部;步进电机;第一同步带轮,第二同步带轮,同步带,所述第二同步带轮的直径大于所述第一同步带轮的直径;输出轴,所述输出轴依次构造有输出部、驱动部、转动部和编码器码盘设置部;以及编码器码盘,编码器读头部;所述第一同步带轮与所述步进电机相连接,所述第一同步带轮通过所述同步带与所述第二同步带轮连接,所述输出轴的驱动部与所述第二同步带轮连接,所述输出轴的转动部与所述基板的输出轴设置部相连接,所述编码器码盘设置于所述输出轴的编码器码盘设置部之上,所述编码器读头部与所述基板相连接,所述编码器读头部对应所述编码器码盘位置设置;所述基板的输出轴设置部、所述步进电机、所述输出轴的转动部、所述输出轴的编码器码盘设置部、所述编码器码盘和所述编码器读头部至少大部分位于所述基板的一侧,所述第一同步带轮、所述第二同步带轮、所述同步带和所述输出轴的输出部、所述输出轴的驱动部至少大部分位于所述基板的另一侧。
要求:
1.一种同步带轮驱动结构,其特征在于,包括:
基板,所述基板构造有输出轴设置部;
步进电机;
第一同步带轮,第二同步带轮,同步带,所述第二同步带轮的直径大于所述第一同步带轮的直径;
输出轴,所述输出轴依次构造有输出部、驱动部、转动部和编码器码盘设置部;以及
编码器码盘,编码器读头部;
所述第一同步带轮与所述步进电机相连接,所述第一同步带轮通过所述同步带与所述第二同步带轮连接,所述输出轴的驱动部与所述第二同步带轮连接,所述输出轴的转动部与所述基板的输出轴设置部相连接,所述编码器码盘设置于所述输出轴的编码器码盘设置部之上,所述编码器读头部与所述基板相连接,所述编码器读头部对应所述编码器码盘位置设置;
所述基板的输出轴设置部、所述步进电机、所述输出轴的转动部、所述输出轴的编码器码盘设置部、所述编码器码盘和所述编码器读头部至少大部分位于所述基板的一侧,所述第一同步带轮、所述第二同步带轮、所述同步带和所述输出轴的输出部、所述输出轴的驱动部至少大部分位于所述基板的另一侧。
2.根据权利要求1所述的一种同步带轮驱动结构,其特征在于,
所述基板构造有第一板孔,所述步进电机还包括电机输出轴,所述电机输出轴穿过所述第一板孔与所述第一同步带轮相连接,所述步进电机构造有若干个第一螺纹孔,所述基板构造有若干个第二螺纹孔,通过若干个螺钉连接至少部分所述第一螺纹孔和至少部分所述第二螺纹孔,使所述基板与所述步进电机可拆卸地固定连接。
3.根据权利要求1所述的一种同步带轮驱动结构,其特征在于,
所述第二同步带轮的直径为所述所述第一同步带轮的直径的2~8倍。
4.根据权利要求1所述的一种同步带轮驱动结构,其特征在于,
所述编码器码盘为磁编码盘,所述编码器读头部为磁编编码器读头部,所述磁编编码器读头部包括PCL板和设置于所述上的磁编编码器读头。
5.根据权利要求4所述的一种同步带轮驱动结构,其特征在于,
所述基板构造有磁编编码器读头部托架,所述磁编编码器读头部设置于所述磁编编码器读头部托架之上,所述磁编编码器读头部与所述磁编编码器读头部托架可拆卸地固定连接。
6.根据权利要求1所述的一种同步带轮驱动结构,其特征在于,还包括:
两个轴承;
所述基板还构造有输出轴承载部,所述输出轴承载部构造为中空环形,两个所述轴承分别设置于所述输出轴承载部的两端,所述输出轴依次穿过两个所述轴承,所述输出轴的转动部别与两个所述轴承的内轴相连接。
7.根据权利要求6所述的一种同步带轮驱动结构,其特征在于,
所述输出轴的驱动部位置构造有注胶槽,通过所述注胶槽注胶使所述输出轴的驱动部与所述第二同步带轮胶结固定,所述输出轴的编码器码盘设置部为一与所述编码器码盘相匹配凹槽,所述输出轴的尾端构造有一阻隔结构,所述阻隔结构与其相邻所述轴承的内轴相卡接。
8.根据权利要求1所述的一种同步带轮驱动结构,其特征在于,还包括:
第一壳体和第二壳体;
所述基板构造有若干个螺孔或者螺纹槽、以及第二壳体连接部,所述基板通过若干个所述螺孔或者所述螺纹槽与所述第一壳体可拆卸地固定连接,所述基板通过所述第二壳体连接部与所述第二壳体相连接。
9.一种机器人驱动底座,其特征在于,包括一对对称设置的如权利要求1至8任一项所述的一种同步带轮驱动结构。
10.一种桌面级机械臂,其特征在于,包括如权利要求9所述的一种机器人驱动底座。
同步带轮驱动结构、机器人驱动底座及桌面级机械臂
技术领域
本发明涉及驱动技术领域,尤其涉及一种同步带轮驱动结构、机器人驱动底座及桌面级机械臂。
背景技术
现在有的桌面级或轻量级机器人或机械臂往往采用直流电机配合减速器作为驱动装置,也有一些桌面级或轻量级机器人通过直流电机配合同步带轮作为驱动装置,然后,这些方案往往都不尽人意,在一方面上,通常存在在保证驱动精度的情况下,结构往往比较复杂,就需要较高的集成度,导致稳定性差、成本过高,装卸不容易等问题,在另一方面上,如果想简化结构,通常会牺牲控制精度,所以亟需一种成本低、结构简单、结构集成度相对较低且控制精度好的驱动结构。
发明内容
本发明实施例提供同步带轮驱动结构、机器人驱动底座及桌面级机械臂,以解决上述问题。
第一方面,本发明实施例提供了一种同步带轮驱动结构,包括:
基板,所述基板构造有输出轴设置部;
步进电机;
第一同步带轮,第二同步带轮,同步带,所述第二同步带轮的直径大于所述第一同步带轮的直径;
输出轴,所述输出轴依次构造有输出部、驱动部、转动部和编码器码盘设置部;以及
编码器码盘,编码器读头部;
所述第一同步带轮与所述步进电机相连接,所述第一同步带轮通过所述同步带与所述第二同步带轮连接,所述输出轴的驱动部与所述第二同步带轮连接,所述输出轴的转动部与所述基板的输出轴设置部相连接,所述编码器码盘设置于所述输出轴的编码器码盘设置部之上,所述编码器读头部与所述基板相连接,所述编码器读头部对应所述编码器码盘位置设置;
所述基板的输出轴设置部、所述步进电机、所述输出轴的转动部、所述输出轴的编码器码盘设置部、所述编码器码盘和所述编码器读头部至少大部分位于所述基板的一侧,所述第一同步带轮、所述第二同步带轮、所述同步带和所述输出轴的输出部、所述输出轴的驱动部至少大部分位于所述基板的另一侧。
可选的,所述基板构造有第一板孔,所述步进电机还包括电机输出轴,所述电机输出轴穿过所述第一板孔与所述第一同步带轮相连接,所述步进电机构造有若干个第一螺纹孔,所述基板构造有若干个第二螺纹孔,通过若干个螺钉连接至少部分所述第一螺纹孔和至少部分所述第二螺纹孔,使所述基板与所述步进电机可拆卸地固定连接。
可选的,所述第二同步带轮的直径为所述所述第一同步带轮的直径的2-8倍。
可选的,所述编码器码盘为磁编码盘,所述编码器读头部为磁编编码器读头部,所述磁编编码器读头部包括PCL板和设置于所述上的磁编编码器读头。
可选的,所述基板构造有磁编编码器读头部托架,所述磁编编码器读头部设置于所述磁编编码器读头部托架之上,所述磁编编码器读头部与所述磁编编码器读头部托架可拆卸地固定连接。
可选的,还包括:两个轴承;所述基板还构造有输出轴承载部,所述输出轴承载部构造为中空环形,两个所述轴承分别设置于所述输出轴承载部的两端,所述输出轴依次穿过两个所述轴承,所述输出轴的转动部别与两个所述轴承的内轴相连接。
可选的,所述输出轴的驱动部位置构造有注胶槽,通过所述注胶槽注胶使所述输出轴的驱动部与所述第二同步带轮胶结固定,所述输出轴的编码器码盘设置部为一与所述编码器码盘相匹配凹槽,所述输出轴的尾端构造有一阻隔结构,所述阻隔结构与其相邻所述轴承的内轴相卡接。
可选的,第一壳体和第二壳体;所述基板构造有若干个螺孔或者螺纹槽、以及第二壳体连接部,所述基板通过若干个所述螺孔或者所述螺纹槽与所述第一壳体可拆卸地固定连接,所述基板通过所述第二壳体连接部与所述第二壳体相连接。
第二方面,本发明实施例提供了一种机器人驱动底座,包括一对对称设置的如上述结构的一种同步带轮驱动结构。
第三方面,本发明实施例提供了一种机器人驱动底座,包括如上述的一种机器人驱动底座。
相对于现有技术,本发明实施例通过在基板上巧妙的布置步进电机、第一同步带轮、第二同步带轮、同步带、输出轴、编码器码盘以及编码器读头部空间关系,设置步进电机、第一同步带轮、第二同步带轮、同步带、输出轴传动结构,以及用于读取输出轴转动量的编码器码盘以及编码器读头部的结构设置,因为结构简单、没有过多的零件,使得结构集成度相对较低,且通过能够读取输出轴转动量保证控制精度,降低了材料成本、安装成本以及维护成本,有效提高了驱动结构的适用寿命。
附图说明
为了更清楚地说明本发明实施例的技术方案,下面将对本发明实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
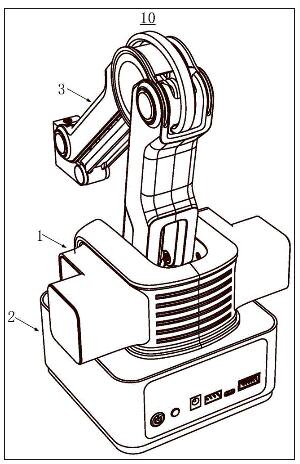
图1是本发明实施例中的桌面级机械臂的结构示意图;
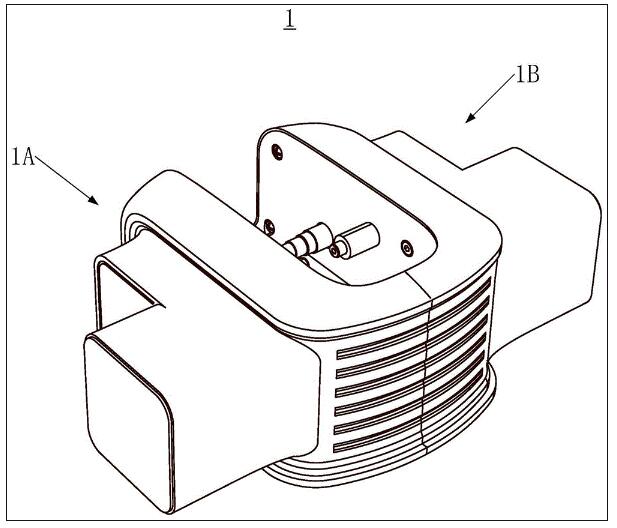
图2是图1实施例中的桌面级机械臂的驱动底座的结构示意图;
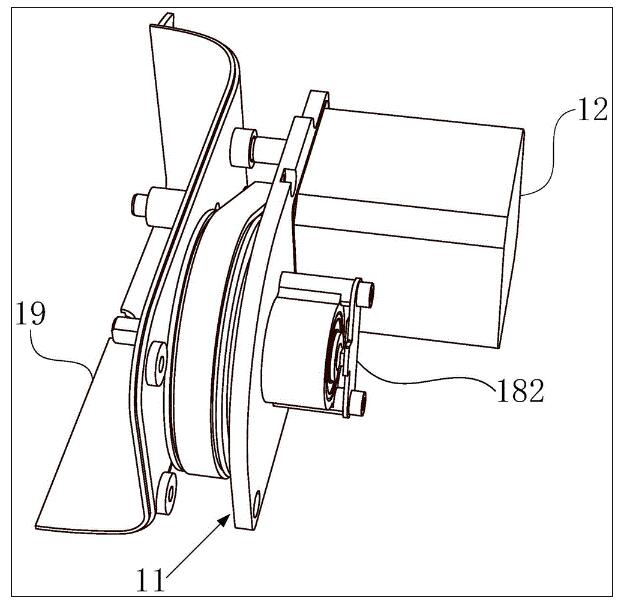
图3是图1实施例中的桌面级机械臂的同步带轮驱动结构的结构示意图;
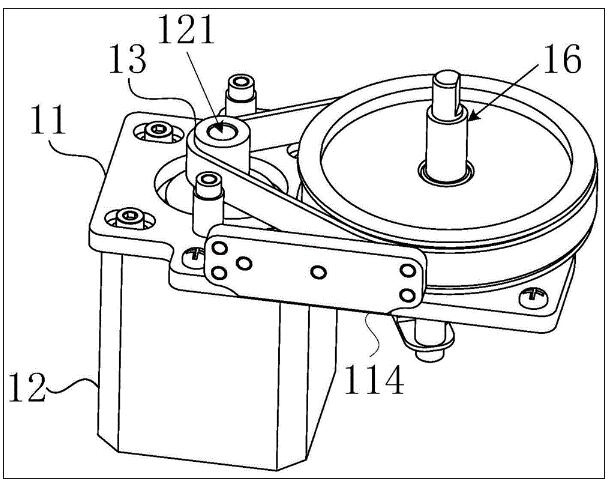
图4是图1实施例中的桌面级机械臂的同步带轮驱动结构的结构示意图;
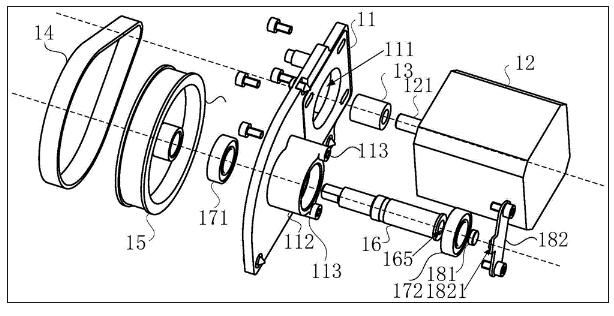
图5是图1实施例中的桌面级机械臂的同步带轮驱动结构的爆炸结构示意图;
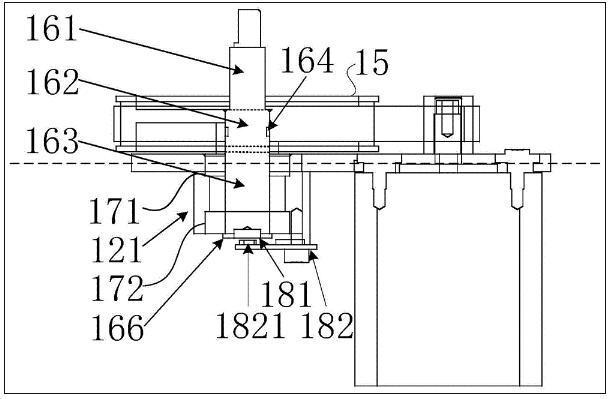
图6是图1实施例中的桌面级机械臂的同步带轮驱动结构的剖视结构示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请一并参阅图1-2,图1是本发明实施例中的桌面级机械臂的结构示意图,图2是图1实施例中的桌面级机械臂的驱动底座的结构示意图。
在一些实施例中,桌面级机械臂10包括驱动底座1、基座2和机械臂臂体3,驱动底座1与基座2相连接,基座2能够驱动驱动底座1在水平方向上转动,驱动底座1包括第一驱动结构1A和第二驱动结构1B,驱动底座1分别通过第一驱动结构1A和第二驱动结构1B与机械臂臂体3链接,通过第一驱动结构1A和第二驱动结构1B能够为机械臂臂体3提供两个传动轴或传动杆轴向运动的动力。
在本实施中,驱动底座1的第一驱动结构1A和第二驱动结构1B对称设置,相对同侧设置而言,空间利用率高,外形美观,且两侧重量平衡,能够降低单侧重力过大对控制精度的影响。
请一并参阅图3-6,图3是图1实施例中的桌面级机械臂的同步带轮驱动结构的结构示意图,图4是图1实施例中的桌面级机械臂的同步带轮驱动结构的结构示意图,图5是图1实施例中的桌面级机械臂的同步带轮驱动结构的爆炸结构示意图,图6是图1实施例中的桌面级机械臂的同步带轮驱动结构的剖视结构示意图。
在本实施例中,第一驱动结构1A和第二驱动结构1B的同步带轮驱动结构包括:
基板11,基板11构造有输出轴设置部112;
步进电机12;
第一同步带轮13,第二同步带轮15,同步带14,第二同步带轮15的直径大于第一同步带轮14的直径;
输出轴16,输出轴16依次构造有输出部161、驱动部162、转动部163和编码器码盘设置部165;以及
编码器码盘181,编码器读头部182;
第一同步带轮13与步进电机11相连接,第一同步带轮13通过同步带14与第二同步带轮15连接,输出轴16穿过第二同步带轮15,输出轴16的驱动部162与第二同步带轮15连接,输出轴16的转动部163与基板11的输出轴设置部112相连接,编码器码盘181设置于输出轴的编码器码盘设置部165之上,编码器读头部182与基板11相连接,编码器读头部182对应编码器码盘181位置设置;
参见图6,基板11的输出轴设置部112、步进电机11、输出轴16的转动部163、输出轴16的编码器码盘设置部165、编码器码盘181和编码器读头部182至少大部分位于基板11的一侧,第一同步带轮13、第二同步带轮15、同步带14和输出轴16的输出部161、输出轴16的驱动部162至少大部分位于基板11的另一侧,因为在同步带14使用过程中会产生磨损,磨损后会产生微尘,如果微尘积聚在编码器码盘181和编码器读头部182的话会降低其传感的精度,进而导致控制精度变差,在本实施例中,通过以基板11为阻隔,使同步带14与编码器码盘181和编码器读头部182隔离,能够有效防止同步带14磨损产生的微尘落入在编码器码盘181和编码器读头部182的位置,能够有效控制在编码器码盘181和编码器读头部182的传感精度,进而提高了驱动结构的使用寿命,在一些实施例中,对于至少大部分位于的限定可以是:单一的构件本体的投影长度的至少70%位置基板11的一侧,可以定义为某结构的至少大部分位于基板11的一侧。
请参阅图5,在本实施例中,基板11还可以构造有第一板111,步进电机12还包括电机输出轴121,电机输出轴121穿过第一板孔111与第一同步带轮13相连接,步进电机11构造有若干个第一螺纹孔,基板构造有若干个第二螺纹孔,通过若干个螺钉连接至少部分第一螺纹孔和至少部分第二螺纹孔,能够使基板11与步进电机12可拆卸地固定连接。
在一些本实施例中,第二同步带轮15的直径为第一同步带轮13的直径的2~8倍,示例性的,第二同步带轮15的直径可以为第一同步带轮13的直径的2倍、3倍、4倍、5倍、6倍、7倍或者8倍,亦可为2-8倍中的任一倍数,第二同步带轮15的直径比第一同步带轮13的直径大的越多,其控制精度越高,在本实施例中第一同步带轮13通过同步带14传动第二同步带轮15,相当于起到了减速机的作用,第二同步带轮15的直径比第一同步带轮13的直径大的越多,减速能力越强其控制精度越高,进而能够提高步进电机12输出的动力的控制精度。
在本实施例中,编码器码盘181可以为磁编码盘,编码器读头部182可以为磁编编码器读头部,磁编编码器读头部包括PCL板和设置于上的磁编编码器读头1821,基板11可以构造有磁编编码器读头部托架113,磁编编码器读头部182设置于磁编编码器读头部托架113之上,磁编编码器读头部182与磁编编码器读头部托架113可拆卸地固定连接。
在一些实施例中编码器码盘181也可以为光编码盘或其他传感器件,编码器读头部182可以为光编编码器读头部其他传感器件。
请参阅图5和图6,在本实施例中,还包括:第一轴承171和第二轴承172,基板11还构造有输出轴承载部112,输出轴承载112部构造为中空环形,第一轴承171和第二轴承172分别设置于输出轴承载部112的两端,输出轴16依次穿过第二轴承172和第一轴承171后,输出轴16的转动部别与第一轴承171和第二轴承172的内轴相连接。
在本实施例中,还包括:如图3所视的第一壳体19和如图2所视与第一壳体19扣和的第二壳体;
基板11可以构造有若干个螺孔或者螺纹槽、以及第二壳体连接部114,基板11通过若干个螺孔或者螺纹槽与第一壳体可拆卸地固定连接,基板11通过第二壳体连接部114与第二壳体相连接。
请再次参阅图5和图6,在本实施例中,输出轴16的驱动部162位置构造有注胶槽164,通过注胶槽164注胶能够使输出轴16的驱动部164与第二同步带轮15胶结固定,输出轴16的编码器码盘设置部165为一与编码器码盘181相匹配凹槽,输出轴16的尾端构造有一阻隔结构166,阻隔结构166与其相邻轴承的内轴相卡接。
应该说明的是,在本实施例中,输出轴16为一体成型结构,对输出轴16的输出部161、驱动部162、转动部163、编码器码盘设置部165和阻隔结构166的划分仅为功能性的划分,在一些实施例中输出轴的输出部、驱动部、转动部、编码器码盘设置部和阻隔结构可以由分体或部分分体的结构构成。
综上所述,本实施例中的同步带轮驱动结构,在安装是先准备基板11;然后在基板11的一侧通过螺栓固定步进电机12;接着在基板11的输出轴承载部112的两端分别安装第一轴承171和第二轴承172,之后从第二轴承172的一侧,插入输出轴16,使阻隔结构166与第二轴承172的内轴相卡接;再在输出轴16的编码器码盘设置部165安装编码器码盘181,在磁编编码器读头部托架113之上安装编码器读头部182,使磁编编码器读头1821对应编码器码盘181设置,可以通过螺栓使磁编编码器读头部托架113与安装编码器读头部182可拆卸地固定连接,可以通过胶水使编码器码盘181固定于编码器码盘设置部165之内;接下来在步进电机12的电机输出轴121安装第一同步带轮13,在注胶槽164注胶后安装第二同步带轮15,使输出轴16的驱动部164与第二同步带轮15胶结固定,最后安装在第一同步带轮13与第二同步带轮15之上套上同步带14,即可完成的同步带轮驱动结构的安装,整个结构结构简单,设计巧妙,容易安装,结构强度高,且驱动控制精度高,通过在基板上巧妙的布置步进电机、第一同步带轮、第二同步带轮、同步带、输出轴、编码器码盘以及编码器读头部空间关系,设置步进电机、第一同步带轮、第二同步带轮、同步带、输出轴传动结构,以及用于读取输出轴转动量的编码器码盘以及编码器读头部的结构设置,因为结构简单、没有过多的零件,使得结构集成度相对较低,且通过能够读取输出轴转动量保证控制精度,降低了材料成本、安装成本以及维护成本,有效提高了驱动结构的适用寿命。
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。

Copyright © 宁波鄞州盖奇同步带轮有限公司 2007-2022 All Rights Reserved.
电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:宁波市鄞州区下应街道启明南路同盛巷 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持
电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:宁波市鄞州区下应街道启明南路同盛巷 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持