产品搜索
当前位置:首页->一种旋转抛射装置及多角度抛射方法
相关连接: 同步带规格 同步带型号 同步带轮规格 同步带轮型号
一种旋转抛射装置及多角度抛射方法
【申请公布号:CN109011498A;申请权利人:华南理工大学;发明设计人:张东; 王浩楠; 董健; 陈智杰; 余兆昊; 陈之楷;】
摘要:
本发明公开一种旋转抛射装置及多角度抛射方法,旋转抛射装置包括机架、驱动电机、导电滑环、转杆、舵机、气爪、安装板、同步带结构、伸出板和激光传感器,所述驱动电机固定于机架上,驱动电机的输出端设有导电滑环,导电滑环连接转杆,驱动电机驱动导电滑环转动,导电滑环带动转杆转动,转杆的一端设有舵机,舵机连接气爪,安装板固定于机架的侧面,同步带结构设于安装板上,伸出板的一端连接同步带结构,同步带结构带动伸出板进行上下运动,伸出板另一端设有激光传感器。旋转抛射装置的多角度抛射方法,通过将激光传感器设于不同高度,控制转杆于不同高度进行抛射物品,实现物品多角度的抛射。 同步带轮规格
主权项:
1.一种旋转抛射装置,其特征在于,包括机架、驱动电机、导电滑环、转杆、舵机、气爪、安装板、同步带结构、伸出板和激光传感器,所述驱动电机固定于机架上,驱动电机的输出端设有导电滑环,导电滑环连接转杆,驱动电机驱动导电滑环转动,导电滑环带动转杆转动,转杆的一端设有舵机,舵机连接气爪,安装板固定于机架的侧面,同步带结构设于安装板上,伸出板的一端连接同步带结构,同步带结构带动伸出板进行上下运动,伸出板另一端设有激光传感器。
要求:
1.一种旋转抛射装置,其特征在于,包括机架、驱动电机、导电滑环、转杆、舵机、气爪、安装板、同步带结构、伸出板和激光传感器,所述驱动电机固定于机架上,驱动电机的输出端设有导电滑环,导电滑环连接转杆,驱动电机驱动导电滑环转动,导电滑环带动转杆转动,转杆的一端设有舵机,舵机连接气爪,安装板固定于机架的侧面,同步带结构设于安装板上,伸出板的一端连接同步带结构,同步带结构带动伸出板进行上下运动,伸出板另一端设有激光传感器。
2.根据权利要求1所述的旋转抛射装置,其特征在于,所述机架的顶部设有电机座,驱动电机设于电机座,驱动电机通过梅花联轴器与导电滑环连接。
3.根据权利要求2所述的旋转抛射装置,其特征在于,所述导电滑环设有连接角码,转杆上设有连接块,导电滑环通过连接角码与连接块连接。
4.根据权利要求1所述的旋转抛射装置,其特征在于,所述同步带结构包括两个同步轮、同步带、同步带张紧块和传送电机,传送电机和同步轮分别安装于安装板,传送电机的电机轴与其中一个同步轮连接,同步带安装于两个同步轮之间,同步带张紧块安装于同步带。
5.根据权利要求1所述的旋转抛射装置,其特征在于,还包括导轨和滑块,所述导轨安装于机架上,滑块设于导轨上,伸出杆的一端固定于滑块上,滑块与同步带张紧块固定连接。
6.根据权利要求1所述的旋转抛射装置,其特征在于,还包括伸出板限位块,所述伸出板限位块安装于机架的顶部,伸出板限位块具有开口,伸出板位于开口内,开口的大小与伸出板匹配。
7.根据权利要求1所述的旋转抛射装置,其特征在于,还包括定位开关,所述定位开关安装于安装板上,且位于伸出板的下方。
8.根据权利要求1所述的旋转抛射装置,其特征在于,所述机架一侧设有斜支撑架。
9.根据权利要求1所述的旋转抛射装置,其特征在于,所述激光传感器发射的激光位于转杆转动的范围内,且垂直于转杆转动的平面。
10.一种如权1-9任一项所述的旋转抛射装置的多角度抛射方法,其特征在于,包括以下步骤:
a、激光传感器初始化后,同步带结构带动伸出板进行上下移动,直至激光传感器所处的高度达到设定高度;
b、驱动电机驱动导电滑环转动,从而带动转杆转动;
c、当激光传感器检测到转杆反射回来的激光,控制舵机松开气爪释放物体,至此完成物体抛射。
一种旋转抛射装置及多角度抛射方法
技术领域
本发明涉及物品抛射领域,特别涉及一种旋转抛射装置及多角度抛射方法。
背景技术
抛射运动在日常生活中极为常见,比如在网球运动员进行训练时需要抛射网球练习运动员的接球能力。要实现网球运动员训练的全自动化,就要求机器人能够抛射出不同角度及速度的网球,从而全方位训练运动员。这样一类机器人需要一种多角度抛射装置,目前市面上对于多角度抛射装置的研究仍然比较欠缺。
发明内容
本发明的目的在于克服现有技术的不足,提供一种旋转抛射装置,通过舵机控制气爪抓取及释放物品,导电滑环使得转杆能够无限旋转而不造成舵机电线绕线,实现物品的高速抛射。
本发明的另一目的在于提供一种上述旋转抛射装置的多角度抛射方法,通过将激光传感器设于不同高度,控制转杆于不同高度进行抛射物品,实现多角度的抛射。
本发明的技术方案为:一种旋转抛射装置,包括机架、驱动电机、导电滑环、转杆、舵机、气爪、安装板、同步带结构、伸出板和激光传感器,所述驱动电机固定于机架上,驱动电机的输出端设有导电滑环,导电滑环连接转杆,驱动电机驱动导电滑环转动,导电滑环带动转杆转动,转杆的一端设有舵机,舵机连接气爪,安装板固定于机架的侧面,同步带结构设于安装板上,伸出板的一端连接同步带结构,同步带结构带动伸出板进行上下运动,伸出板另一端设有激光传感器。
所述机架的顶部设有电机座,驱动电机设于电机座,驱动电机通过梅花联轴器与导电滑环连接。
所述导电滑环设有连接角码,转杆上设有连接块,导电滑环通过连接角码与连接块连接。
所述同步带结构包括两个同步轮、同步带、同步带张紧块和传送电机,传送电机和同步轮分别安装于安装板,传送电机的电机轴与其中一个同步轮连接,同步带安装于两个同步轮之间,同步带张紧块安装于同步带。
旋转抛射装置还包括导轨和滑块,所述导轨安装于机架上,滑块设于导轨上,伸出杆的一端固定于滑块上,滑块与同步带张紧块固定连接。
旋转抛射装置还包括伸出板限位块,所述伸出板限位块安装于机架的顶部,伸出板限位块具有开口,伸出板位于开口内,开口的大小与伸出板匹配。开口限制伸出板的水平偏摆,确保伸出板只做上下垂直运动,提高激光传感器的精度。
旋转抛射装置还包括定位开关,所述定位开关安装于安装板上且位于伸出板的下方,伸出板向下运动至触发定位开关,此时初始化装置,便于激光传感器的定位。
所述机架一侧设有斜支撑架,可改善机架受力,使转杆转动时造成的震动减少。
所述激光传感器发射的激光位于转杆转动的范围内,且垂直于转杆转动的平面。
一种上述旋转抛射装置的多角度抛射方法,包括以下步骤:
a、激光传感器初始化后,同步带结构带动伸出板进行上下移动,直至激光传感器所处的高度达到设定高度;
b、驱动电机驱动导电滑环转动,从而带动转杆转动;
c、当激光传感器检测到转杆反射回来的激光,控制舵机松开气爪释放物体,至此完成物体抛射。
通过将激光传感器设于不同高度,控制转杆于不同高度进行抛射物品,实现物品的多角度的抛射。
本发明相对于现有技术,具有以下有益效果:
本发明的旋转抛射装置通过舵机控制气爪抓取及释放物品,导电滑环使得转杆能够无限旋转而不造成舵机电线绕线,使物体抛出的速度较高。
本发明的旋转抛射装置的多角度抛射方法通过将激光传感器设于不同高度,控制转杆于不同高度进行抛射物品,实现多角度的抛射。
附图说明
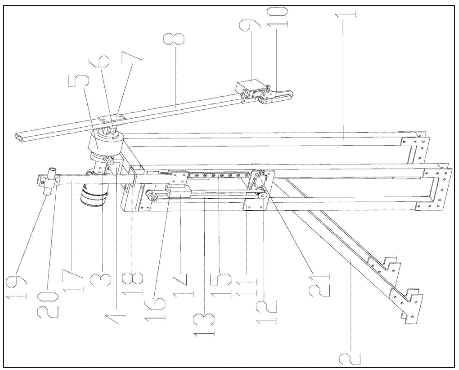
图1为本发明旋转抛射装置的结构示意图。
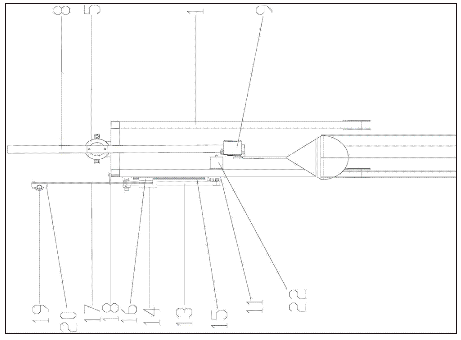
图2为本发明旋转抛射装置的初始状态主视图。
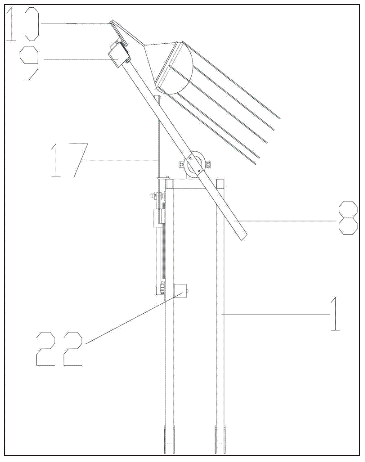
图3为本发明旋转抛射装置较大角度抛射时,物品旋转到激光传感器将释放的示意图。
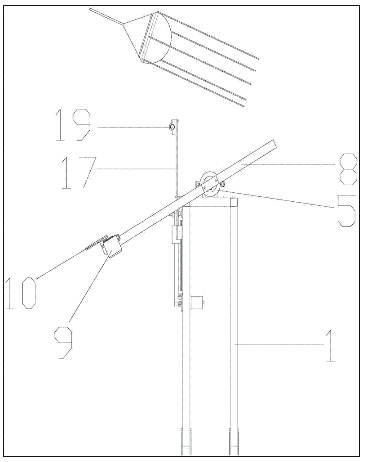
图4为本发明旋转抛射装置较大角度抛射时,物品释放后的示意图。
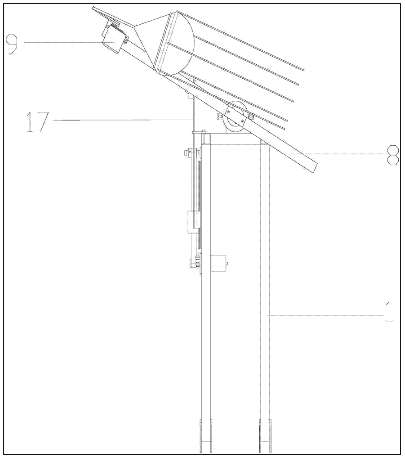
图5为本发明旋转抛射装置较小角度抛射时,物品旋转到激光传感器将释放的示意图。
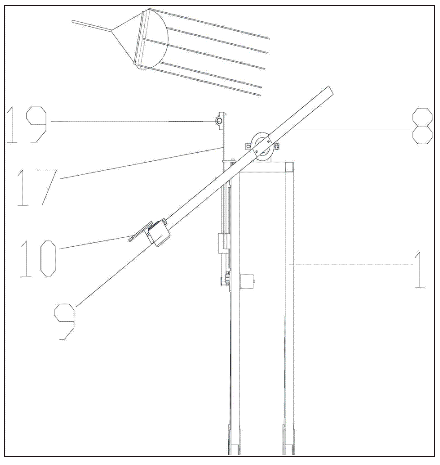
图6为本发明旋转抛射装置较小角度抛射时,物品释放后的示意图。
机架1、斜支撑架2、驱动电机3、电机座4、导电滑环5、连接角码6、连接块7、转杆8、舵机9、气爪10、安装板11、同步轮12、同步带13、同步带张紧块14、导轨15、滑块16、伸出板17、伸出板限位块18、激光传感器19、激光固定座20、定位开关21、传送电机22。
具体实施方式
下面结合实施例,对本发明作进一步的详细说明,但本发明的实施方式不限于此。
实施例1
如图1和图2所示,本实施例一种旋转抛射装置,包括机架1、驱动电机3、电机座4、导电滑环5、连接角码6、连接块7、转杆8、舵机9、气爪10、安装板11、同步带结构、伸出板17、伸出板限位块18、激光传感器19、激光固定座20、导轨15和滑块16。
机架一侧设有斜支撑架2,可改善机架受力,使转杆转动时造成的震动减少。
如图1和图2所示,电机座安装于机架顶部,驱动电机设于电机座,驱动电机的输出端通过梅花联轴器与导电滑环连接,导电滑环设有连接角码,转杆设有连接块,导电滑环通过连接角码与连接块连接,驱动电机驱动导电滑环转动,导电滑环带动转杆转动,转杆的一端设有舵机,舵机连接气爪,转杆的另一端未设置零件,用以平衡转杆的转矩,改善导电滑环的受力情况。
如图1和图2所示,安装板11通过螺栓螺母固定于机架的侧面,同步带结构设于安装板,同步带结构包括两个同步轮12、同步带13、同步带张紧块14和传送电机22,传送电机和同步轮安装于安装板,传送电机的电机轴通过紧定螺钉连接其中一个同步轮,使电机轴和同步轮同步转动而不发生相对转动,同步带安装于两个同步轮之间,同步带张紧块安装于同步带,通过同步带张紧块对同步带进行张紧,保证带轮包角及预紧力。
如图1和图2所示,导轨安装于机架的侧面且位于同步带的一侧,滑块16设于导轨且可沿导轨15上下滑动,同步带张紧块与滑块固定连接,伸出板17的一端固定于滑块,另一端设有激光固定座20,激光传感器19设于激光固定座,激光传感器发射的激光位于转杆转动的范围内,且垂直于转杆转动的平面。 同步带轮规格
如图1和图2所示,同步带传动带动同步带张紧块和滑块上下运动,进一步带动伸出板上下运动,伸出板限位块18通过螺栓螺母固定于机架的顶部,伸出板限位块具有开口,伸出板位于开口内,开口的大小与伸出板匹配,伸出板穿过开口上下运动,开口限制伸出板的水平偏摆,确保伸出板只做上下垂直运动,提高激光传感器的精度;定位开关21安装于安装板且位于伸出板的下方,当旋转抛射装置通电时,传送电机转动进一步带动伸出板向下运动至触发定位开关,此时初始化装置,便于激光传感器的定位。
实施例2
如图3、图4、图5和图6所示,本实施例为一种实施例1所述的旋转抛射装置的多角度抛射方法,包括以下步骤:
a、旋转抛射装置通电后,伸出板向下运动至伸出板触发定位开关,使激光传感器初始化,然后同步带结构带动伸出板进行上下移动,直至激光传感器所处的高度达到设定高度;
b、驱动电机驱动导电滑环转动,从而带动转杆转动;
c、当激光传感器检测到转杆反射回来的激光,控制舵机松开气爪释放物体,至此完成物体抛射。
通过将激光传感器设于不同高度,控制转杆于不同高度进行抛射物品,实现对物品进行多角度的抛射。
如上所述,便可较好地实现本发明,上述实施例仅为本发明的较佳实施例,并非用来限定本发明的实施范围;即凡依本发明内容所作的均等变化与修饰,都为本发明权利要求所要求保护的范围所涵盖。

Copyright © 宁波鄞州盖奇同步带轮有限公司 2007-2022 All Rights Reserved.
电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:宁波市鄞州区下应街道启明南路同盛巷 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持
电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:宁波市鄞州区下应街道启明南路同盛巷 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持