产品搜索
当前位置:首页->一种巡检机器人自主充电对接装置
一种巡检机器人自主充电对接装置
【授权公告号:CN212649156U;申请权利人: 河北工业大学; 发明设计人: 刘璇; 金玉康; 梁博超; 刘悦; 张小俊; 杨秉骏;】
摘要:
本实用新型一种巡检机器人自主充电对接装置,包括母接头组件和公接头组件,母接头组件安装在巡检机器人上,公接头组件安装在充电桩上;所述母接头组件包括母接头、充电插头和丝杠模组,公接头组件包括公接头、同步带模组和弹簧;充电插头在丝杠模组的作用下能伸出巡检机器人的外壳并穿过母接头的插口,插入公接头的插孔中;公接头通过多个弹簧安装在同步带模组的滑块上;在弹簧的作用下,能够实现母接头和公接头在三维方向上的斜向对接;同步带模组的电机在对接过程中不工作,用于充电完成后公接头的归位。该装置在巡检机器人定位存在较小偏差的情况下,母接头未能正对公接头的方向运动时,两个接头也能完全对接。
主权项:
1.一种巡检机器人自主充电对接装置,包括母接头组件和公接头组件,母接头组件安装在巡检机器人上,公接头组件安装在充电桩上;其特征在于,所述母接头组件包括母接头、充电插头和丝杠模组,公接头组件包括公接头、同步带模组和弹簧;充电插头在丝杠模组的作用下能伸出巡检机器人的外壳并穿过母接头的插口,插入公接头的插孔中;公接头通过多个弹簧安装在同步带模组的滑块上;在弹簧的作用下,能够实现母接头和公接头在三维方向上的斜向对接;同步带模组的电机在对接过程中不工作,用于充电完成后公接头的归位。
要求:
1.一种巡检机器人自主充电对接装置,包括母接头组件和公接头组件,母接头组件安装在巡检机器人上,公接头组件安装在充电桩上;其特征在于,所述母接头组件包括母接头、充电插头和丝杠模组,公接头组件包括公接头、同步带模组和弹簧;充电插头在丝杠模组的作用下能伸出巡检机器人的外壳并穿过母接头的插口,插入公接头的插孔中;公接头通过多个弹簧安装在同步带模组的滑块上;在弹簧的作用下,能够实现母接头和公接头在三维方向上的斜向对接;同步带模组的电机在对接过程中不工作,用于充电完成后公接头的归位。
2.根据权利要求1所述的巡检机器人自主充电对接装置,其特征在于,所述母接头固定丝杠模组的端部;充电插头固定在丝杠模组的滑块上,充电插头同时被包裹在巡检机器人的外壳内,不充电时充电插头位于巡检机器人的外壳内;母接头组件还包括一号激光测距传感器和避障模块,一号激光测距传感器固定在母接头上,在母接头朝向公接头的侧面上设有避障模块;公接头组件还包括二号激光测距传感器,二号激光测距传感器安装在公接头的顶面上。
3.根据权利要求1所述的巡检机器人自主充电对接装置,其特征在于,所述母接头的一侧设有呈棱锥台型的凹槽,公接头的侧面设有与凹槽相配合的凸台。
4.根据权利要求3所述的巡检机器人自主充电对接装置,其特征在于,所述凹槽的粗端位于母接头侧面,凹槽的细端向母接头内部延伸。
5.根据权利要求3所述的巡检机器人自主充电对接装置,其特征在于,所述母接头凹槽的粗端尺寸为15cm*15cm,深度为10cm;公接头凸台的细端尺寸为5cm*5cm。
6.根据权利要求3所述的巡检机器人自主充电对接装置,其特征在于,所述母接头的凹槽内包覆有一层橡胶层,橡胶层的厚度为3mm。
技术领域
本实用新型涉及巡检机器人自主充电技术领域,具体是一种巡检机器人自主充电对接装置。
背景技术
巡检机器人自主充电方式一般分为接触式和非接触感应式。接触式充电是充电设备与电池之间通过部件连接,对电池进行充电;非接触感应式充电,即无线充电,基于电磁感应原理,通过耦合方式进行电能的传递。
无线充电技术发展成果显著,但是无线充电设备造价昂贵,成本较高,维修和维护都非常困难,而且大部分无线充电设备的充电功率不高,因此目前大部分巡检机器人主要采用接触式充电,完成能量的补给。由于在充电过程中巡检机器人完全自主与充电桩对接,即使巡检机器人的定位精度很高,母接头和公接头也会存在微小的定位误差,不能实现到充电插头的精准对插,致使充电插头磨损。此外巡检机器人由于车身倾斜、地面不平等因素都会造成母接头与公接头在水平以及竖直方向上定位不准,因此实现公、母接头在三维方向上的斜向对接显得尤为重要。
文献《变电站巡检机器人自动充电技术研究》中公开了一种充电对接结构,只能实现公接头与母接头在水平面上180°范围内的斜向对接。
实用新型内容
针对现有技术的不足,本实用新型拟解决的技术问题是,提供一种巡检机器人自主充电对接装置。
本实用新型解决所述技术问题的技术方案是:
一种巡检机器人自主充电对接装置,包括母接头组件和公接头组件,母接头组件安装在巡检机器人上,公接头组件安装在充电桩上;其特征在于,
所述母接头组件包括母接头、充电插头和丝杠模组,公接头组件包括公接头、同步带模组和弹簧;充电插头在丝杠模组的作用下能伸出巡检机器人的外壳并穿过母接头的插口,插入公接头的插孔中;公接头通过多个弹簧安装在同步带模组的滑块上;在弹簧的作用下,能够实现母接头和公接头在三维方向上的斜向对接;同步带模组的电机在对接过程中不工作,用于充电完成后公接头的归位。
所述母接头固定丝杠模组的端部;充电插头固定在丝杠模组的滑块上,充电插头同时被包裹在巡检机器人的外壳内,不充电时充电插头位于巡检机器人的外壳内;母接头组件还包括一号激光测距传感器和避障模块,一号激光测距传感器固定在母接头上,在母接头朝向公接头的侧面上设有避障模块;公接头组件还包括二号激光测距传感器,二号激光测距传感器安装在公接头的顶面上。
所述母接头的一侧设有呈棱锥台型的凹槽,公接头的侧面设有与凹槽相配合的凸台。
所述凹槽的粗端位于母接头侧面,凹槽的细端向母接头内部延伸。
所述母接头凹槽的粗端尺寸为15cm*15cm,深度为10cm;公接头凸台的细端尺寸为5cm*5cm。
所述母接头的凹槽内包覆有一层橡胶层,橡胶层的厚度为3mm。
与现有技术相比,本实用新型的有益效果是:
1.本实用新型在弹簧的作用下,再结合母接头和公接头对接时会在接触面产生摩擦作用,能够实现母接头和公接头在三维方向上的斜向对接,即在巡检机器人定位存在较小偏差的情况下,母接头未能正对公接头的方向运动时,两个接头也能完全对接。
2.本实用新型采用丝杠模组实现充电插头的往复运动,因为丝杠模组的丝杠电机不工作后,滑块在丝杠上处于锁死状态,无法运动,能够防止巡检机器人运动过程中,由于颠簸导致充电插头剧烈震动,造成损坏;丝杠模组的力矩大,能够提供足够的力去推动充电插头的插针插入充电桩的充电接口中。
3.在对接过程中同步带模组的驱动电机不工作,同步带模组的滑块受到外力后仍然能够自由滑动,因此对接过程中促使公接头的位置可以微调,实现两个接头的插接;由于在每一个对接过程中,公接头都是微调位置,因此充电完成后同步带模组的驱动电机带动公接头归位,防止定位误差造成累计,增加了可靠性。
4.本实用新型在母接头凹槽的两侧均设有避障模块,防止定位错误,使得当公接头的凸台未能顺利进入母接头的凹槽,公接头凸台的端面卡在母接头凹槽的两侧,造成碰撞;不充电时,充电插头均位于巡检机器人的外壳内,可防止潮湿短路等情况发生;母接头凹槽的底部设有激光测距传感器,能够防止巡检机器人与充电桩对接完成后,巡检机器人未能察觉到对接过程已完成,继续运动造成部件损坏。
5.本实用新型在两个接头对接完成后,充电插头才从巡检机器人的外壳内伸出插入充电桩的充电接口中,实现充电插头的精准对插,降低由于误差造成的充电插头损耗。
6.由于两个接头完全通过摩擦进行配合,为了降低摩擦对接对接头造成的损耗,因此在母接头的凹槽内设有橡胶层,增强耐用性。
附图说明
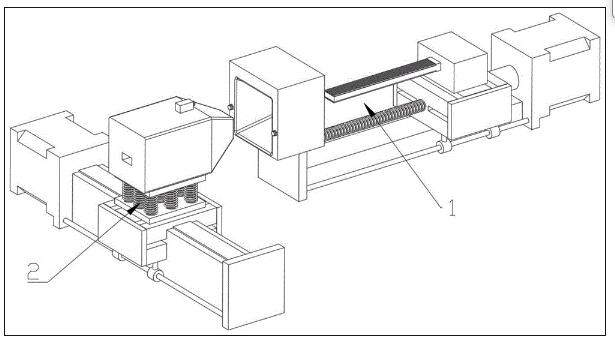
图1为本实用新型的整体结构示意图;
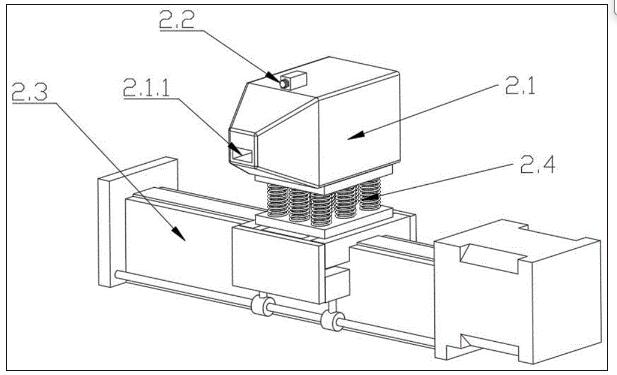
图2为本实用新型的公接头组件的结构示意图;
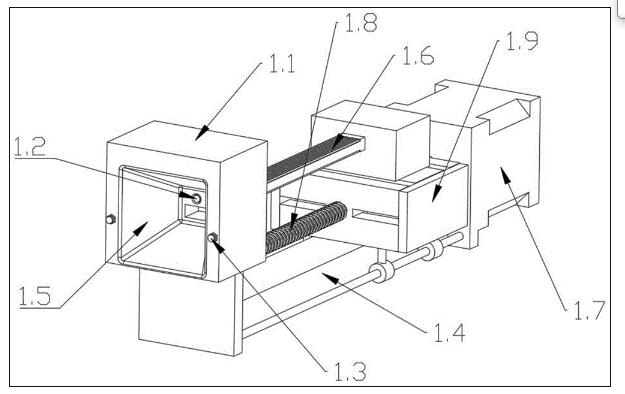
图3为本实用新型的母接头组件的结构示意图;
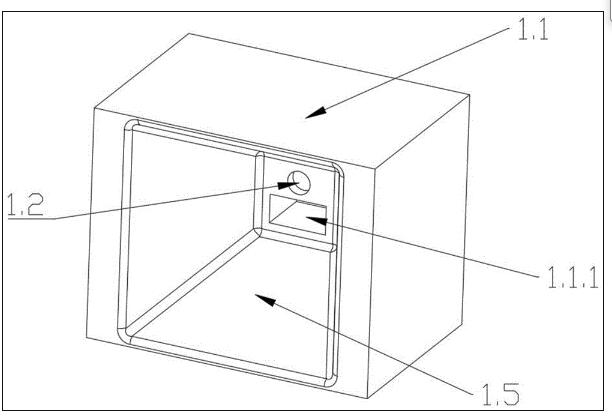
图4为本实用新型的母接头的结构示意图;
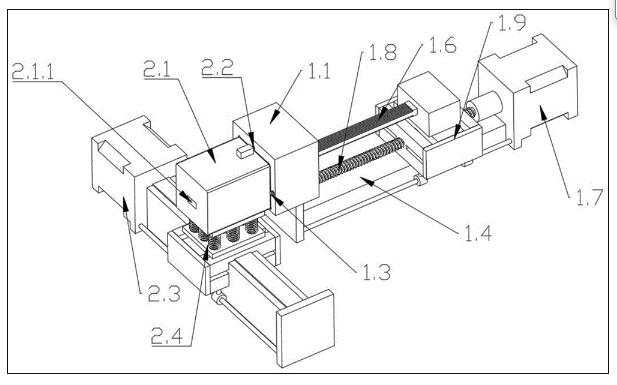
图5为本实用新型的母接头组件与公接头组件对接完成后的结构示意图;
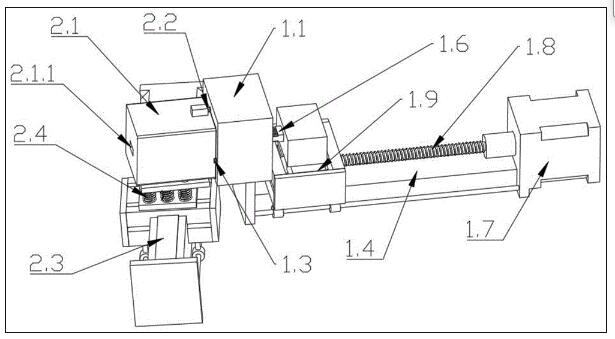
图6为本实用新型的母接头组件与公接头组件斜向对接后的结构示意图;
图中:1-母接头组件;2-公接头组件;
1.1-母接头;1.2-一号激光测距传感器;1.3-避障模块;1.4-底板;1.5-橡胶层;1.6-充电插头;1.7-丝杠电机;1.8-丝杠;1.9-滑块;
2.1-公接头;2.2-二号激光测距传感器;2.3-同步带型模组;2.4-弹簧;
1.1.1-插孔;2.1.1-插口。
具体实施方式
下面将结合本具体附图对本实用新型的技术方案进行清楚完整地描述,显然,所描述的实施例仅仅是本实用新型的一部分实施例,而不是全部的实施例,并不用于限定权利要求的保护范围。
本实用新型提出了一种巡检机器人自主充电对接装置(简称装置,参见图1-6),包括母接头组件1和公接头组件2,母接头组件1全部安装在巡检机器人上,公接头组件2安装在充电桩上;
所述母接头组件1包括母接头1.1、一号激光测距传感器1.2、避障模块1.3、底板1.4、充电插头1.6、丝杠电机1.7、丝杠1.8和滑块1.9;所述公接头组件2包括公接头2.1、二号激光测距传感器2.2、同步带模组2.3和弹簧2.4;
所述底板1.4和丝杠电机1.7均安装在巡检机器人上,母接头1.1固定在底板1.4靠近充电桩的一端;母接头1.1上设有方便与公接头2.1对接的凹槽,母接头1.1的中部设有贯穿凹槽的插孔1.1.1,用于充电插头1.6的插针通过;丝杠电机1.7的输出端通过联轴器与丝杠1.8的一端固连,丝杠1.8的另一端与底板1.4的端部转动连接;滑块1.9滑动安装在丝杠1.8上,充电插头1.6固定在滑块1.9上,充电插头1.6同时被包裹在巡检机器人的外壳内;在滑块1.9的作用下,充电插头1.6在丝杠1.8上滑动,使充电插头1.6伸出巡检机器人的外壳,并穿过母接头1.1的插孔1.1.1以及公接头2.1插入充电桩的充电接口中;不充电时,充电插头1.6位于巡检机器人的外壳内,防止下雨导致短路;一号激光测距传感器1.2固定在母接头1.1的凹槽内,用于检测母接头1.1与公接头2.1对接过程中的间距,当间距小于5mm时表示两个接头对接结束,此时巡检机器人立即停止运动,防止巡检机器人过度运动,损伤部件;在母接头1.1的凹槽的两侧分别设有避障模块1.3,防止对接过程中由于巡检机器人定位产生偏差,导致公接头2.1与巡检机器人发生碰撞;
所述同步带模组2.3安装在充电桩上,公接头2.1通过多个弹簧2.4安装在同步带模组2.3的滑块上;同步带模组2.3在对接过程中不工作,用于充电完成后公接头2.1的归位,避免造成累积定位误差;公接头2.1靠近母接头组件1的一侧设有与母接头1.1的凹槽相配合的凸台,公接头2.1的中部设有贯穿整个公接头2.1的插口2.1.1,充电插头1.6的插针穿过插口2.1.1插入充电桩的充电接口中;同时在弹簧2.3的作用下,能够实现母接头1.1和公接头2.1在三维方向上的斜向对接,即当巡检机器人定位存在较小偏差,导致母接头1.1未能在正对公接头2.1的方向靠近公接头2.1时,两个接头也能完全对接;二号激光测距传感器2.2安装在公接头2.1上,用于检测充电完成后巡检机器人离开过程中巡检机器人与公接头2.1之间的距离,确保巡检机器人超过设定距离后,同步带模组2.3才工作,带动公接头2.1在同步带模组2.3的同步带上滑动,实现公接头2.1的归位。
所述母接头1.1的凹槽呈棱锥台型,棱锥台的粗端位于母接头1.1侧面,棱锥台的细端朝向母接头1.1内部延伸,容许的对接精度误差更大;母接头1.1的凹槽内包覆有一层橡胶层1.5,以减小对接过程中母接头1.1与公接头2.1摩擦导致的损耗,橡胶层1.5的厚度为3mm。
所述母接头1.1凹槽的粗端尺寸为15cm*15cm,深度为10cm;公接头2.1凸台的细端尺寸为5cm*5cm,保证在10cm级定位误差内,母接头1.1与公接头2.1能够顺利完成对接。
本实用新型中也可以使母接头为棱锥凸台型,公接头为棱锥凹槽型。
本实施例的一号激光测距传感器1.2和二号激光测距传感器2.2的型号均为ATK-VL53L0X;丝杠电机1.7的型号为GX210;避障模块1.3的型号为E18-D80NK。
本实用新型的工作原理和工作流程是:
首先巡检机器人对充电桩进行定位,巡检机器人运动至充电桩附近,并调整机器人机身的位置,使母接头1.1的凹槽与公接头2.1的凸台相对;然后巡检机器人朝着靠近公接头2.1的方向运动,使母接头1.1的凹槽与公接头2.1的凸台依靠摩擦进行配合,如图5所示;对接过程中同步带模组2.3的驱动电机不工作,完全依靠两个接头摩擦配合微调公接头2.1的位置;当一号激光测距传感器1.2检测到的距离小于5mm时,巡检机器人停止运动,此时在丝杠1.8和滑块1.9的共同作用下,将充电插头1.6从巡检机器人的外壳推出(不充电时充电插头1.6位于巡检机器人的外壳内),使充电插头1.6的插针穿过母接头1.1的插孔1.1.1和公接头2.1的插口2.1.1,并插入充电桩的充电接口中进行充电。
当充电完成后,巡检机器人朝着远离充电桩的方向运动,充电插头1.6在丝杠1.8和滑块1.9的共同作用下反向运动,并收回至巡检机器人的外壳内;当二号激光测距传感器2.2检测到巡检机器人已经离开设定距离后,同步带模组2.3的驱动电机工作,带动同步带转动,使同步带模组2.3的滑块滑动,实现公接头2.1的归位。
当实际对接过程中,由于巡检机器人定位存在误差,使得母接头1.1和公接头2.1在水平方向仍然存在一定的角度偏差,机器人的车胎高度或机身高度变化,使两个接头在竖直方向也存在一定的误差,因此依靠弹簧2.4能够实现两个接头在三维方向上的斜插,如图6所示。
本实用新型未述及之处适用于现有技术。

Copyright © 宁波鄞州盖奇同步带轮有限公司 2007-2022 All Rights Reserved.
电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:浙江省宁波市鄞州区姜山镇蔡郎桥村姜南路39-2 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持
电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:浙江省宁波市鄞州区姜山镇蔡郎桥村姜南路39-2 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持