【申请号:201420514480.9;专利权人:广州博润包装机械有限公司;发明人:陈官晓、罗永、傅月明、柯烁桦】
摘要:
一种高速自动装箱机双轴机械手,包括横向臂、纵向臂和滑动座,电机通过同步带轮驱动同步带,横向臂上设有第一导轨和两个第一限位孔;滑动座的背面设有第一滑块和第一气缸,第一滑块与所述第一导轨滑动配合,滑动座的正面设有第二滑块和第二气缸,纵向臂的背面设有第二导轨和第二限位孔,第二滑块与所述第二导轨滑动配合;第一气缸的伸缩杆与所述第二限位孔配合,第二气缸的伸缩杆与所述第一限位孔配合;纵向臂顶部设有过渡同步带轮,同步带依次经过左下滚轮、主动同步带轮、左上滚轮、过渡同步带轮、右上滚轮、被动同步带轮、右下滚轮,且同步带的两端分别固定在纵向臂的左右两侧。通过一个电机驱动机械手横向运动和纵向运动。
要求:
1 一种高速自动装箱机双轴机械手,其特征在于:包括横向臂、与所述横向臂垂直的纵向臂和滑动座,所述横向臂的两端分别设有主动同步带轮和被动同步带轮,所述主动同步带轮与电机输出轴连接,所述横向臂上于主动同步带轮与被动同步带轮之间设有第一导轨和两个第一限位孔;所述滑动座的背面设有第一滑块和第一气缸,所述第一滑块与所述第一导轨滑动配合,所述滑动座的正面设有第二滑块和第二气缸,所述纵向臂的背面设有第二导轨和第二限位孔,所述第二滑块与所述第二导轨滑动配合;所述第一气缸的伸缩杆与所述第二限位孔配合,所述第二气缸的伸缩杆与所述第一限位孔配合;所述纵向臂顶部设有过渡同步带轮,所述滑动座上于所述纵向臂的两侧分别设有两个呈上下设置的过渡滚轮,分别为左下滚轮、左上滚轮、右下滚轮和右上滚轮,设有同步带依次经过左下滚轮、主动同步带轮、左上滚轮、过渡同步带轮、右上滚轮、被动同步带轮、右下滚轮,且同步带的两端分别固定在纵向臂的左右两侧。
2 .根据权利要求 1 所述的一种高速自动装箱机双轴机械手,其特征在于:所述纵向臂和横向臂上设有限位块。
3 .根据权利要求 1 所述的一种高速自动装箱机双轴机械手,其特征在于:所述纵向臂的左右两侧分别设有夹紧装置,所述夹紧装置包括与纵向臂固定的底座和与所述底座配合的压块,所述压块通过螺栓与底座连接,所述底座上设有防滑条纹。
4 .根据权利要求 1 所述的一种高速自动装箱机双轴机械手,其特征在于:所述纵向臂正面一侧设有固定板,所述过渡滚轮设置在滑动座与固定板之间。
技术领域
本实用新型涉及自动装箱机,尤其是一种高速自动装箱机双轴机械手。
背景技术
装箱机用于完成运输包装,它将包装成品按一定排列方式和定量装入箱中,并把箱的开口部分闭合或封固。在自动包装流水线中,装箱机是整线系统运行的核心,包装机械虽不是产品直接生产机械,但它却是实现生产自动化所必需的。自动装箱机是一种智能性全自动装箱机,采用高速分配装置包装各种容器,包装塑料扁瓶、圆瓶、不规则形瓶,各种大小玻璃瓶,圆瓶、椭圆形瓶、方形罐及纸罐等。自动装箱机一般包括产品输送装置、抓瓶机械手、纸箱成型装置和封箱装置,通过上述装置相互配合完成自动装箱。抓瓶机械手的稳定性和速度是决定装箱机生产效率,如何设计一款简单合理的装瓶机械手是生产高速自动装箱机的关键。
发明内容
本实用新型所要解决的技术问题是提供一种高速自动装箱机双轴机械手,结构简单,且能够快速、稳定的搬运产品。
为解决上述技术问题,本实用新型的技术方案是:一种高速自动装箱机双轴机械手,包括横向臂、与所述横向臂垂直的纵向臂和滑动座,所述横向臂的两端分别设有主动同步带轮和被动同步带轮,所述主动同步带轮与电机输出轴连接,所述横向臂上于主动同步带轮与被动同步带轮之间设有第一导轨和两个第一限位孔;所述滑动座的背面设有第一滑块和第一气缸,所述第一滑块与所述第一导轨滑动配合,所述滑动座的正面设有第二滑块和第二气缸,所述纵向臂的背面设有第二导轨和第二限位孔,所述第二滑块与所述第二导轨滑动配合;所述第一气缸的伸缩杆与所述第二限位孔配合,所述第二气缸的伸缩杆与所述第一限位孔配合;所述纵向臂顶部设有过渡同步带轮,所述滑动座上于所述纵向臂的两侧分别设有两个呈上下设置的过渡滚轮,分别为左下滚轮、左上滚轮、右下滚轮和右上滚轮,设有同步带依次经过左下滚轮、主动同步带轮、左上滚轮、过渡同步带轮、右上滚轮、被动同步带轮、右下滚轮,且同步带的两端分别固定在纵向臂的左右两侧。本实用新型与抓手配合,用于搬运产品。本实用新型的动作过程包括抓取产品、搬运和释放产品;工作时,位于滑动座正面的第二气缸伸出伸缩杆并插入第一限位孔中,用于锁定纵向臂不能横向移动;启动电机,通过主动同步带轮、被动同步带轮驱动同步带,由于同步带的两端均匀纵向臂固定,同步带在运动的同时会带动纵向臂往下运动,从而完成抓取产品的动作;电机反转使纵向臂复位,此时第二气缸的伸缩杆回缩解除对纵向臂横向移动的锁定;同时,第一气缸动作,第一气缸的伸缩杆伸入纵向臂的第二限位孔,用于锁定纵向臂的纵向移动;电机通过主动同步带和被动同步带驱动同步带运动,此时同步带的运动可以带动滑动座连同纵向臂横一起横向平移,从而完成搬运产品的动作;产品被搬运到自动位置后,第一气缸复位解除对纵向臂纵向移动的锁定,同时,第二气缸再次动作将伸缩杆伸入第二限位孔,以锁定纵向臂的横向移动;启动电机驱动同步带,使纵向臂往下运动,从而完成释放产品的动作。本实用新型只需一个电机即可完成产品的搬运,结构简单,而且搬运速度快、稳定。
]作为改进,所述纵向臂和横向臂上设有限位块。
作为改进,所述纵向臂的左右两侧分别设有夹紧装置,所述夹紧装置包括与纵向臂固定的底座和与所述底座配合的压块,所述压块通过螺栓与底座连接,所述底座上设有防滑条纹。
作为改进,所述纵向臂正面一侧设有固定板,所述过渡滚轮设置在滑动座与固定板之间。
本实用新型与现有技术相比所带来的有益效果是:
本实用新型利用一个电机驱动同步带,同步带两端与纵向臂固定,通过第一气缸和第二气缸分别与横向臂和纵向臂上的限位孔配合,以锁定纵向臂的横向运动或上下运动,从而完成纵向臂的往下抓取动作、横向的搬运动作以及往下的释放动作,结构简单,而且搬运速度快、稳定。
附图说明
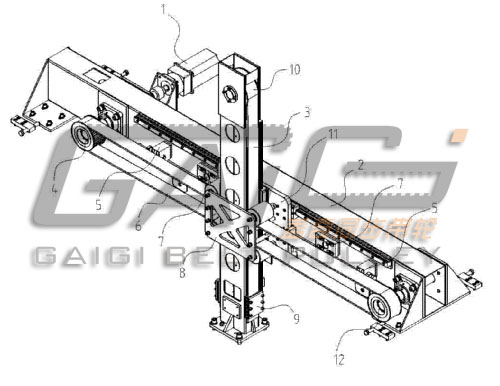
图 1 为本实用新型立体图。
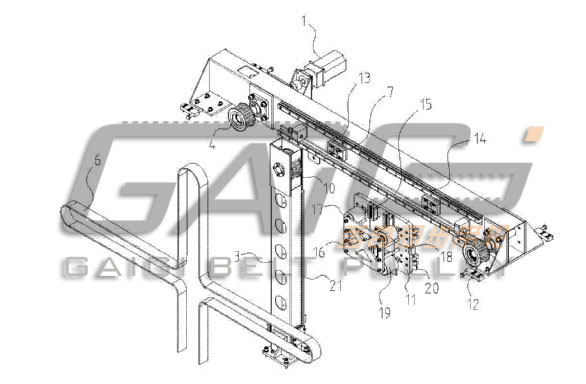
图 2 为本实用新型分解视图。
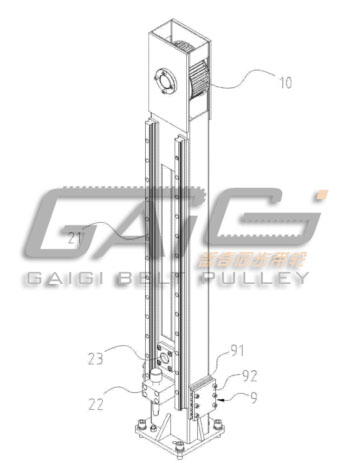
图 3 为纵向臂结构示意图。
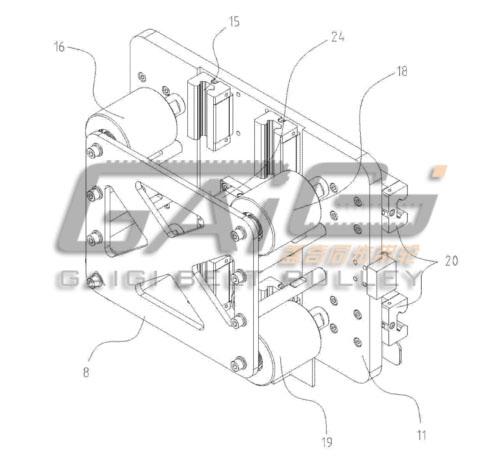
图 4 为滑动座正面示意图。
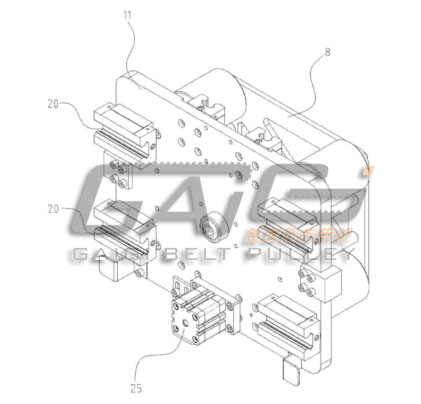
图 5 为滑动座背面示意图。
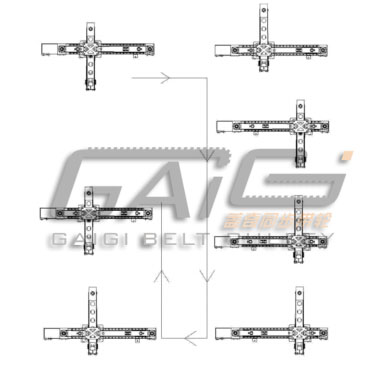
图 6 为机械手动作过程图。
具体实施方式
下面结合说明书附图对本实用新型作进一步说明。
如图 1 所示,一种高速自动装箱机双轴机械手,包括横向臂 2 、与所述横向臂 2 垂直的纵向臂 3 和滑动座 11 。纵向臂 3 通过滑动座 H 在横向臂 2 上横向平移,并且纵向臂 3 可在滑动座 H 上纵向移动。
如图 1 、 2 所示,所述横向臂 2 的两端分别设有主动同步带轮 4 和被动同步带轮 12 , 所述主动同步带轮 4 与电机 1 输出轴连接;所述横向臂 2 上于主动同步带轮 4 与被动同步带轮 12 之间设有第一导轨 14 、两个第一限位孔 7 和两个限位块 5 ,第一限位孔 7 可以设置在孔座 13 上,孔座 13 通过螺栓固定在横向臂 2 上,两个第一限位孔 7 的距离可根据机械手的搬运距离而设定。如图 5 所示,所述滑动座 H 的背面设有第一滑块 20 和第一气缸 25 , 所述第一滑块 20 与所述第一导轨 14 滑动配合,使滑动座 H 可以沿着横向臂 2 横向移动;如图 4 所示,所述滑动座 H 的正面设有第二滑块 15 和第二气缸 24 ,所述纵向臂 3 的背面设有第二导轨 21 和第二限位孔 23 和限位块 22 ,所述第二滑块 15 与所述第二导轨 21 滑动配合,使纵向臂 3 可以在滑动座 H 上纵向移动。所述第一气缸 25 的伸缩杆与所述第二限位孔 23 配合,当第一气缸 25 的伸缩杆插入第二限位孔 23 时,即滑动座 H 与纵向臂 3 连接在一起,二者之间不能发生相对位置,即锁定纵向臂 3 的纵向移动;所述第二气缸 24 的伸缩杆与所述第一限位孔 7 配合,当第二气缸 24 的伸缩杆插入第一限位孔 7 时,即横向臂 2 与滑动座 H 连接在一起,二者之间不能发生相对位置,即锁定纵向臂 3 的横向移动。如图 2 、 3 所示,所述纵向臂 3 顶部设有过渡同步带轮 10 ,所述滑动座 H 上于所述纵向臂 3 的两侧分别设有两个呈上下设置的过渡滚轮,分别为左下滚轮 16 、左上滚轮 17 、右下滚轮 19 和右上滚轮 18 ;所述纵向臂 3 正面一侧设有固定板,所述过渡滚轮设置在滑动座 H 与固定板 8 之间。设有同步带依次经过左下滚轮 16 、主动同步带轮 4 、左上滚轮 17 、过渡同步带轮 10 、右上滚轮 18 、被动同步带轮 12 、右下滚轮 19 ;最后,同步带的两端分别通过夹紧装置 9 固定在纵向臂 3 的左右两侧。如图 3 所示,所述夹紧装置 9 包括与纵向臂 3 固定的底座 91 和与所述底座 91 配合的压块 92 ,所述压块 92 通过螺栓与底座 91 连接,所述底座 91 上设有防滑条纹。
如图 1 、 6 所示,本实用新型与抓手配合,用于搬运产品。本实用新型的动作过程包括抓取产品、搬运和释放产品;工作时,位于滑动座 H 正面的第二气缸 24 伸出伸缩杆并插入第一限位孔 7 中,用于锁定纵向臂 3 不能横向移动;启动电机 1 ,通过主动同步带轮 4 、被动同步带轮 12 驱动同步带,由于同步带的两端均匀纵向臂 3 固定,同步带在运动的同时会带动纵向臂 3 往下运动,从而完成抓取产品的动作;电机 1 反转使纵向臂 3 复位,此时第二气缸 24 的伸缩杆回缩解除对纵向臂 3 横向移动的锁定;同时,第一气缸 25 动作,第一气缸 25 的伸缩杆伸入纵向臂 3 的第二限位孔 23 ,用于锁定纵向臂 3 的纵向移动;电机 1 通过主动同步带和被动同步带驱动同步带运动,此时同步带的运动可以带动滑动座 H 连同纵向臂 3 横一起横向平移,从而完成搬运产品的动作;产品被搬运到自动位置后,第一气缸 25 复位解除对纵向臂 3 纵向移动的锁定,同时,第二气缸 24 再次动作将伸缩杆伸入第二限位孔 23 ,以锁定纵向臂 3 的横向移动;启动电机 1 驱动同步带,使纵向臂 3 往下运动,从而完成释放产品的动作。本实用新型只需一个电机 1 即可完成产品的搬运,结构简单,而且搬运速度快、稳定。

电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:浙江省宁波市鄞州区姜山镇蔡郎桥村姜南路39-2 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持 浙公网安备33021202003319号