【申请号:201520048369.X;专利权人:扬州威德曼自动化科技有限公司;发明人:韩雨】
摘要:
本实用新型公开了注塑技术领域内的一种注塑机械手的取料臂装置,同步带配装有张紧机构,张紧机构包括由上往下依次固定排列在滑动座上的第一张紧轮、第二张紧轮、第三张紧轮,第三张紧轮位于同步轮的右上方,第一张紧轮、第二张紧轮、第三张紧轮的中心轴共处的平面平行于 Y 轴;第一张紧轮紧靠同步带的非齿面,并将同步带顶向取料臂;第二张紧轮紧靠同步带的齿面,并将同步带朝取料臂的外侧方向顶;第二张紧轮下方的同步带先绕过同步轮再缠绕在第三张紧轮上。使得张紧效果显著得到提升,同步带能够保持与取料臂之间的间隙而不会拍打取料臂。
要求
1 一种注塑机械手的取料臂装置,包括 X 轴轨道( 1 )、可在 X 轴轨道( 1 )上来回滑动的滑动座( 3 ) ,所述取料臂( 2 )安装在滑动座( 3 )上并可作 Y 轴运动,所述取料臂( 2 )的一侧设有传动系统,所述传动系统包括固定在滑动座( 3 )上的电机( 4 ) ,所述电机( 4 )的动力输出端安装同步轮( 5 ) ,所述同步轮( 5 )配装有同步带( 6 ) ,所述同步带( 6 )与同步轮( 5 )呈压力接触,所述同步带( 6 )的首尾两端都固定在带夹( 10 )上并与取料臂( 2 )之间留有间隙,所述带夹( 10 )固定连接在取料臂( 2 )的上下部分;所述同步带( 6 )配装有张紧机构,其特征在于:所述张紧机构包括由上往下依次固定排列在滑动座( 3 )上的第一张紧轮( 7 )、第二张紧轮( 8 )、第三张紧轮( 9 ) ,所述第三张紧轮( 9 )位于同步轮( 5 )的右上方,所述第一张紧轮( 7 )、第二张紧轮( 8 )、第三张紧轮( 9 )的中心轴共处的平面平行于 Y 轴;所述第一张紧轮 ( 7 )紧靠同步带( 6 )的非齿面,并将同步带( 6 )顶向取料臂( 2 ) ;所述第二张紧轮( 8 )紧靠同步带( 6 )的齿面,并将同步带( 6 )朝取料臂( 2 )的外侧方向顶;所述第二张紧轮( 8 )下方的同步带( 6 )先绕过同步轮( 5 )再向上缠绕在第三张紧轮( 9 )上。
2 .根据权利要求 1 所述的一种注塑机械手的取料臂装置,其特征在于:连接同步轮 ( 5 )、第三张紧轮( 9 )的同步带( 6 )部分以同步轮( 5 )的中心轴为准向外倾斜。
3 .根据权利要求 1 所述的一种注塑机械手的取料臂装置,其特征在于:所述第一张紧轮( 7 )、第二张紧轮( 8 )、第三张紧轮( 9 )等距排列。
4 .根据权利要求 1 一 3 中任一项所述的一种注塑机械手的取料臂装置,其特征在于:所述同步带( 6 )与取料臂( 2 )之间所留的最小间隙在 20 一 25ITlln 之间。
技术领域
本实用新型涉及一种注塑机械手,特别涉及一种注塑机械手的取料臂。
背景技术
现有技术中,控制注塑机的取件臂包括 x 轴轨道、可在 x 轴轨道上来回滑动的滑动座,取料臂安装在滑动座上并可作 Y 轴运动,取料臂的一侧设有传动系统,传动系统包括固定在滑动座上的电机,电机的动力输出端安装同步轮,同步轮配装有同步带,同步带与同步轮呈压力接触,同步带的首尾两端都固定在带夹上并与取料臂之间留有间隙,带夹固定连接在取料臂上;同步带配装有张紧机构。
现有技术的张紧结构设置方案如下:同步轮的右上方与右下方各设有一个张紧轮,两个张紧轮并排设置并平行于取料臂的运动方向。但是,在实际生产中发现,张紧效果不够显著,使用时间一久,同步带容易产生松动,会不断拍打取料臂,造成取料臂的震动并产生误差。
实用新型内容
本实用新型的目的是提供一种注塑机械手的取料臂装置,使得张紧效果显著得到提升,同步带能够保持与取料臂之间的间隙而不会拍打取料臂。
本实用新型的目的是这样实现的:一种注塑机械手的取料臂装置,包括 x 轴轨道、可在 X 轴轨道上来回滑动的滑动座,所述取料臂安装在滑动座上并可作 Y 轴运动,所述取料臂的一侧设有传动系统,所述传动系统包括固定在滑动座上的电机,所述电机的动力输出端安装同步轮,所述同步轮配装有同步带,所述同步带与同步轮呈压力接触,所述同步带的首尾两端都固定在带夹上并与取料臂之间留有间隙,所述带夹固定连接在取料臂的上下部分;所述同步带配装有张紧机构,所述张紧机构包括由上往下依次固定排列在滑动座上的第一张紧轮、第二张紧轮、第三张紧轮,所述第三张紧轮位于同步轮的右上方,所述第一张紧轮、第二张紧轮、第三张紧轮的中心轴共处的平面平行于 Y 轴;所述第一张紧轮紧靠同步带的非齿面,并将同步带顶向取料臂;所述第二张紧轮紧靠同步带的齿面,并将同步带朝取料臂的外侧方向顶;所述第二张紧轮下方的同步带先绕过同步轮再向上缠绕在第三张紧轮上。
本实用新型的技术说明如下:第一张紧轮紧靠同步带的非齿面,并将同步带顶向取料臂,形成第一次张紧;第二张紧轮紧靠同步带的齿面,并将同步带朝取料臂的外侧方向顶,形成第二次张紧;第二张紧轮下方的同步带先绕过同步轮再向上缠绕在第三张紧轮上,形成第三次张紧,第三次张紧的效果相当显著,相当于第三张紧轮将同步轮与取料臂下部的带夹之间的同步带向上顶,第三张紧轮能够将同步带顶到同步轮的右上方,能够大大地增强同步带与张紧轮接触的压力;实际使用中可以根据现场情况,适当调节同步轮的中心轴与第三张紧轮的中心轴的上下垂直间距尺寸。
与现有技术相比,本实用新型的有益效果在于:通过同步带缠绕方式、以及张紧轮布置方式的改进,大大地增强同步带与张紧轮、同步轮接触的压力,张紧效果显著得到提升,同步带在取料臂运动的时候不会产生抖动,同步带能够保持与取料臂之间的间隙而不会拍打取料臂。
作为本实用新型的优选方案,连接同步轮、第三张紧轮的同步带部分以同步轮的中心轴为准向外倾斜。可以增加同步带与同步轮、第三张紧轮的接触面,可拉紧同步带,进一步增强张紧力度。
作为本实用新型的进一步优选方案,所述第一张紧轮、第二张紧轮、第三张紧轮等距排列,使得同步带所受的压力保持均匀状态,进一步保证张紧效果。
为了进一步保证同步带在取料臂运动的时候不会拍打取料臂,所述同步带与取料臂之间所留的最小间隙在 20 一 25ITlln 之间。
附图说明
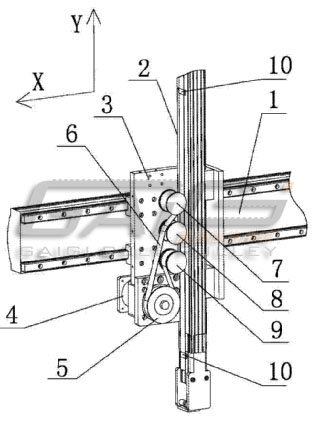
图 1 为本实用新型的示意图。
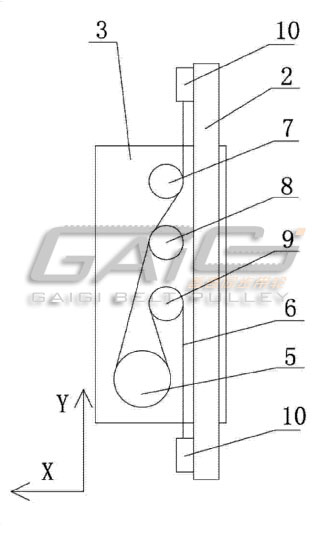
图 2 为张紧机构与取料臂的配合关系图。
其中, 1 一 X 轴轨道, 2 一取料臂, 3 一滑动座, 4 一电机, 5 一同步轮, 6 一同步带, 7 一第一张紧轮, 8 一第二张紧轮, 9 一第三张紧轮, 10 一带夹。
具体实施方式
如图 1 一 2 所示,一种注塑机械手的取料臂装置,包括 X 轴轨道 1 、可在 X 轴轨道 1 上来回滑动的滑动座 3 ,取料臂 2 安装在滑动座 3 上并可作 Y 轴运动,取料臂 2 的一侧设有传动系统,传动系统包括固定在滑动座 3 上的电机 4 ,电机 4 的动力输出端安装同步轮 5 ,同步轮 5 配装有同步带 6 ,同步带 6 与同步轮 5 呈压力接触,同步带 6 的首尾两端都固定在带夹 10 上并与取料臂 2 之间留有间隙,带夹 10 固定连接在取料臂 2 的上下部分;同步带 6 配装有张紧机构,张紧机构包括由上往下依次固定排列在滑动座 3 上的第一张紧轮 7 、第二张紧轮 8 、第三张紧轮 9 ,第三张紧轮 9 位于同步轮 5 的右上方,第一张紧轮 7 、第二张紧轮 8 、第三张紧轮 9 的中心轴共处的平面平行于 Y 轴;第一张紧轮 7 紧靠同步带 6 的非齿面,并将同步带 6 顶向取料臂 2 ;第二张紧轮 8 紧靠同步带 6 的齿面,并将同步带 6 朝取料臂 2 的外侧方向顶;第二张紧轮 8 下方的同步带 6 先绕过同步轮 5 再向上缠绕在第三张紧轮 9 上,并且连接同步轮 5 、第三张紧轮 9 的同步带 6 部分以同步轮 5 的中心轴为准向外倾斜。
上述第一张紧轮 7 、第二张紧轮 8 、第三张紧轮 9 等距排列。
上述同步带 6 与取料臂 2 之间所留的最小间隙在 20 一 25ITlln 之间。
上述第一张紧轮 7 紧靠同步带 6 的非齿面,并将同步带 6 顶向取料臂 2 ,形成第一次张紧;第二张紧轮 8 紧靠同步带 6 的齿面,并将同步带 6 朝取料臂 2 的外侧方向顶,形成第二次张紧;第二张紧轮 8 下方的同步带 6 先绕过同步轮 5 再向上缠绕在第三张紧轮 9 上,形成第三次张紧,第三次张紧的效果相当显著,相当于第三张紧轮 9 将同步轮 5 与取料臂 2 下部的带夹 10 之间的同步带 6 向上顶,第三张紧轮 9 能够将同步带 6 顶到同步轮 5 的右上方,能够大大地增强同步带 6 与所有张紧轮接触的压力;实际使用中可以根据现场情况,适当调节同步轮 5 的中心轴与第三张紧轮 9 的中心轴的上下垂直间距尺寸。
本实用新型并不局限于上述实施例,在本实用新型公开的技术方案的基础上,本领域的技术人员根据所公开的技术内容,不需要创造性的劳动就可以对其中的一些技术特征作出一些替换和变形,这些替换和变形均在本实用新型的保护范围内。

电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:浙江省宁波市鄞州区姜山镇蔡郎桥村姜南路39-2 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持 浙公网安备33021202003319号