一种交叉旋转联动机构
申请(专利)号:CN201410574992.9;申请权利人:天津鑫泰博弈科技有限公司;
摘要:
本发明公开了一种交叉旋转联动机构,其为完全内置式结构,所述全部元件均产生于联动机构主体内部,其中径向电机转动带动径向同步带轮(一),径向同步带轮(二)通过径向同步带与径向同步带轮(一)连接,把扭力传递到径向旋转主体,使其产生径向动作;轴向电机与轴向同步带轮(小)固定,轴向同步带轮(大)通过轴向同步带与轴向同步带轮(小)连接,将扭力传递到轴向输出端,通过轴向旋转轴承完成轴向旋转动作。本发明通过部件内置式结构,在极小空间内部实现了径向及轴向大扭力传递,并将动力以十字交叉方式输出,从而实现设备能任意角度的加工,以及在有限空间内的顺畅工作。
主权项:
一种交叉旋转联动机构,包括:联动机构主体(1)、径向电机(2)、轴向同步带(3)、轴向同步带轮(大)(4)、轴向同步带轮(小)(5)、轴向电机(6)、径向同步带轮(一)(7)、径向同步带(8)、径向同步带轮(二)(9)、径向旋转主体(10)、轴向法兰(11)、轴向旋转轴承(12)、转接齿轮1(13)、转接齿轮2(14),其特征在于:本交叉旋转联动机构为完全内置式结构,所述全部元件以及所发生的驱动、连接、及传动均产生于联动机构主体(1)内部,其中径向电机(2)转动带动径向同步带轮(一)(7),径向同步带轮(二)(8)通过径向同步带(9)与径向同步带轮(一)(7)连接,把扭力传递到径向旋转主体(10),使其上下摆动,产生径向动作;轴向电机(6)与轴向同步带轮(小)(5)固定,轴向同步带轮(大)(4)通过轴向同步带(3)与轴向同步带轮(小)(5)连接,将扭力传递到轴向输出端,通过轴向旋转轴承(14)完成轴向旋转动作。
要求:
1.一种交叉旋转联动机构,包括:联动机构主体(1)、径向电机(2)、轴向同步带(3)、轴向同步带轮(大)(4)、轴向同步带轮(小)(5)、轴向电机(6)、径向同步带轮(一)(7)、径向同步带(8)、径向同步带轮(二)(9)、径向旋转主体(10)、轴向法兰(11)、轴向旋转轴承(12)、转接齿轮1(13)、转接齿轮2(14),其特征在于:本交叉旋转联动机构为完全内置式结构,所述全部元件以及所发生的驱动、连接、及传动均产生于联动机构主体(1)内部,其中径向电机(2)转动带动径向同步带轮(一)(7),径向同步带轮(二)(8)通过径向同步带(9)与径向同步带轮(一)(7)连接,把扭力传递到径向旋转主体(10),使其上下摆动,产生径向动作;轴向电机(6)与轴向同步带轮(小)(5)固定,轴向同步带轮(大)(4)通过轴向同步带(3)与轴向同步带轮(小)(5)连接,将扭力传递到轴向输出端,通过轴向旋转轴承(14)完成轴向旋转动作。
2.根据权利要求1所述的交叉旋转联动机构其特征在于:旋转主体(10)内部有与径向同步带轮(二)(9)匹配的齿形结构,这样径向电机(2)转动可通过传动链直接带动旋转主体(10)上下摆动。
3.根据权利要求1所述的交叉旋转联动机构其特征在于:轴向同步带轮(大)(4)通过转接齿轮1(13)与转接齿轮2(14)完成扭力90度传递到轴向输出端,完成轴向旋转动作。
技术领域
本发明涉及一种交叉旋转联动机构,尤其应用于小空间的工业加工领域,特别是工业机器人。
背景技术
现有技术装置由于体积庞大从而造成精度不足,在很多需要小体积的场合受到制约。本发明针对以上缺点从传动原理入手,开发了新型的本体联动结构,做到了精度高,体积小,拓宽了其应用范围。
发明内容
本发明针对现有技术的不足,提供了一种高精度、小体积一种交叉旋转联动机构,包括:联动机构主体、径向电机、轴向同步带、轴向同步带轮(大)、轴向同步带轮(小)、轴向电机、径向同步带轮(一)、径向同步带、径向同步带轮(二)、径向旋转主体、轴向法兰、轴向旋转轴承、转接齿轮1、转接齿轮2。本一种交叉旋转联动机构为完全内置式结构,所述全部元件以及所发生的驱动、连接、及传动均产生于联动机构主体内部,其中径向电机转动带动径向同步带轮(一),径向同步带轮(二)通过径向同步带与径向同步带轮(一)连接,把扭力传递到径向旋转主体,使其上下摆动,产生径向动作;轴向电机与轴向同步带轮(小)固定,轴向同步带轮(大)通过轴向同步带与轴向同步带轮(小)连接,将扭力传递到轴向输出端,通过轴向旋转轴承完成轴向旋转动作。
优选地,旋转主体内部有与径向同步带轮(二)匹配的齿形结构,这样径向电机转动可直接带动旋转主体上下摆动。
优选地,轴向同步带轮(大)通过转接齿轮1与转接齿轮2完成扭力90度传递到轴向输出端,完成轴向旋转动作。
本发明通过部件内置式结构,在小空间内部实现了径向及轴向大扭力传递,并将动力以十字交叉方式输出,从而实现空间中任意角度的加工,尤其匹配高智能化高精度设备,成功实现了自动设备在小空间的顺畅工作。
附图说明
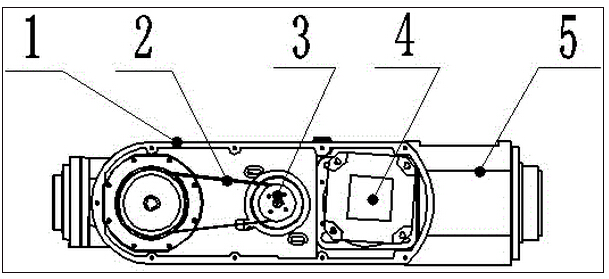
图1为一种交叉旋转联动机构右侧视图。
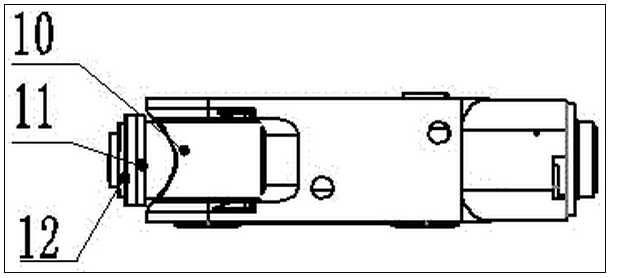
图2为一种交叉旋转联动机构俯视图。
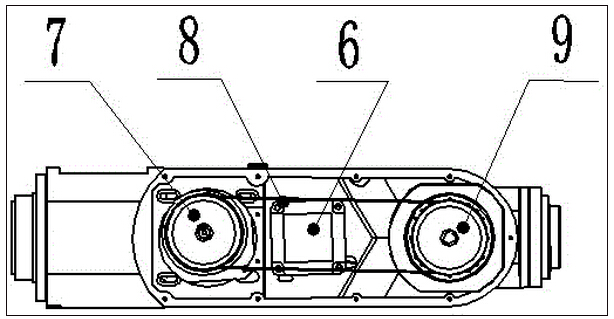
图3为一种交叉旋转联动机构左侧视图。
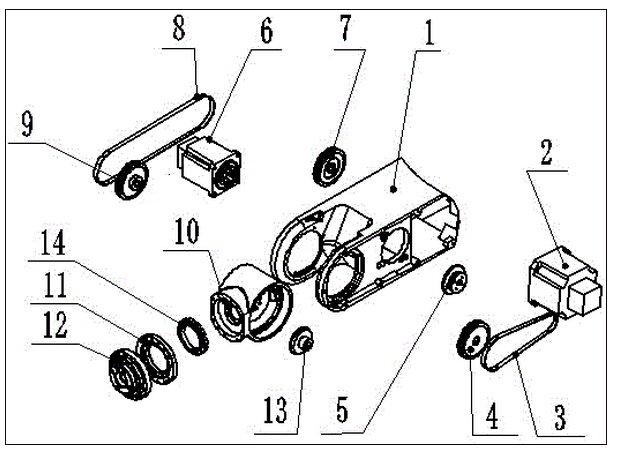
图4为一种交叉旋转联动机构整体分解视图。
图1至4标识说明:1.联动机构主体、2.径向电机、3.轴向同步带、4.轴向同步带轮(大)、5.轴向同步带轮(小)、6.轴向电机、7.径向同步带轮(一)、8.径向同步带、9.径向同步带轮(二)、10.径向旋转主体、11.轴向法兰、12.轴向旋转轴承、13.转接齿轮1、14.转接齿轮2。
具体实施方式
以下将结合附图对本发明进行较为详细的说明:一种交叉旋转联动机构,通过电机及传动部件的全部的内置式结构,极大了缩小了设备动作的空间,从而增大了其在多领域的使用范围。
为了实现上述目的,我们公开了一种交叉旋转联动机构,并且为完全内置式结构,所述全部元件以及所发生的驱动、连接、及传动均产生于联动机构主体(1)内部,其中径向电机(2)转动带动径向同步带轮(一)(7),径向同步带轮(二)(8)通过径向同步带(9)与径向同步带轮(一)(7)连接,旋转主体内部有与径向同步带轮(二)匹配的齿形结构,这样径向电机转动可直接把扭力传递到径向旋转主体(10),使其上下摆动,产生径向动作;轴向电机(6)与轴向同步带轮(小)(5)固定,轴向同步带轮(大)(4)通过轴向同步带与轴向同步带轮(小)(5)连接,通过转接齿轮1与转接齿轮2完成扭力90度传递到轴向输出端,完成轴向旋转动作。
在使用时,所述一种交叉旋转联动机构本身体积的小巧也从形象上优化了整机外形,这一点,在如今高精度工业机器人的制造上意义重大。

电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:浙江省宁波市鄞州区姜山镇蔡郎桥村姜南路39-2 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持 浙公网安备33021202003319号