产品搜索
当前位置:首页->智能自动扶梯节能装置
智能自动扶梯节能装置
【申请公布号: CN107458957A;申请权利人: 哈尔滨工程大学;发明设计人: 孙蓉; 任彦光; 徐文欣; 唐昊; 韩道麟; 韩鹏; 陈敬萱; 李冰;】
摘要:
本发明公开了智能自动扶梯节能装置,属于自动升降设备技术领域。由支架系统,连接系统,传动系统组成,传动系统由左右对称的两部分组成,连接系统将传动系统的两部分连接,支架系统支撑连接系统和传动系统;主要由电机、同步轴、直齿轮、锥齿轮、电磁继电器、同步带、同步带轮、支架等组成。本发明增加了一个多系统联轴传动系统,使得上行扶梯和下行扶梯能量间相互联系。本发明结合人流量潮汐原理,实现了负载波动与驱动力的最优匹配,具有能耗低,能量利用效率高的特点。
主权项:
智能自动扶梯节能装置,其特征在于,由支架系统,连接系统,传动系统组成,传动系统由左右对称的两部分组成,连接系统将传动系统的两部分连接,支架系统支撑连接系统和传动系统;支架系统包括电机套筒(1)、支架一(14)、支架二(17)、特殊结构一(18)和特殊结构二(19);连接系统包括锥齿轮一(2)、锥齿轮二(3)、锥齿轮三(4)和外壳;传动系统包括直齿轮一(5)、直齿轮二(6)、电磁离合器一(7)、电磁离合器二(8)、同步带轮一(9)、同步带轮二(10)、同步带轮三(11)、同步带轮四(12)、同步带(13)、电磁离合器配套的直齿轮一(15)、电磁离合器配套的直齿轮二(16)。
1.智能自动扶梯节能装置,其特征在于,由支架系统,连接系统,传动系统组成,传动系统由左右对称的两部分组成,连接系统将传动系统的两部分连接,支架系统支撑连接系统和传动系统;
支架系统包括电机套筒(1)、支架一(14)、支架二(17)、特殊结构一(18)和特殊结构二(19);
连接系统包括锥齿轮一(2)、锥齿轮二(3)、锥齿轮三(4)和外壳;
传动系统包括直齿轮一(5)、直齿轮二(6)、电磁离合器一(7)、电磁离合器二(8)、同步带轮一(9)、同步带轮二(10)、同步带轮三(11)、同步带轮四(12)、同步带(13)、电磁离合器配套的直齿轮一(15)、电磁离合器配套的直齿轮二(16)。
2.根据权利要求1所述的智能自动扶梯节能装置,其特征在于,所述的支架系统中,电机套筒(1)为上下开口的圆柱体空腔,支架一(14)为直杆的两端竖直固定两根长短不一的直杆,支架二(17)为三节平铺的长方体直板并列而成,特殊结构一(18)和特殊结构二(19)为四角支柱与两块等大中央开孔直板拼接而成;
电机套筒(1)固定在支架二(17)中央上方,支架一(14)分两部分,分别垂直固定于支架二(17)两侧。
3.根据权利要求1所述的智能自动扶梯节能装置,其特征在于,所述的连接系统中,锥齿轮一(2)、锥齿轮二(3)、锥齿轮三(4)为等大的圆台型齿轮,外壳为三块长方体直板拼接成的U型体且两侧开有等大的孔;
锥齿轮一(2)与直流电机相连,锥齿轮二(3)、锥齿轮三(4)与锥齿轮一(2)相啮合,且转动过程中,两者呈现相反的运动趋势。
4.根据权利要求1,3所述的智能自动扶梯节能装置,其特征在于,所述的传动系统中,锥齿轮二(3)与直齿轮二(6)同轴联接,电磁离合器配套的直齿轮二(16)与直齿轮二(6)相互啮合,电磁离合器一(7)与同步带轮一(9)相连接,同步带轮一(9)和同步带轮三(11)之间用皮带相连;
锥齿轮三(4)与直齿轮一(5)同轴联接,电磁离合器配套的直齿轮一(15)与齿轮(5)相啮合,电磁离合器二(8)与同步带轮二(10)相连接,同步带轮二(10)、同步带轮四(12)之间由皮带相互连接在一起;
同步带轮二(10)、同步带轮四(12)经皮带相互联接,同步带轮一(9)、同步带轮二(10)由支架二(17)支撑,同步带轮三(11)由特殊结构二(19)支撑,同步带轮四(12)由特殊结构一(18)支撑。
5.根据权利要求1所述的智能自动扶梯节能装置,其特征在于,下行梯软件流程为:
(1)对系统进行初始化;
(2)检测下行梯负载量;
(3)下行梯负载的当前值与临界负载进行比较;
(4)若当前值小于等于临界负载值,电机处于电动状态,否则,电机处于发电状态;
(5)检测下行扶梯的运行速度;
(6)当前速度与预设速度进行比较,通过控制发电机来控制加载力矩,实现了驱动力和负载波动下的最优匹配;
(7)动态检测。
6.根据权利要求1所述的智能自动扶梯节能装置,其特征在于,上行梯软件流程为:
(1)对系统进行初始化;
(2)检测上行梯、下行梯负载量;
(3)若上行梯上没有负载,则电磁离合器断开,电机处于发电状态;
(4)若上行梯上有负载,则对比上行梯负载量与下行梯负载量,若上行梯负载量远小于下行梯负载量时,电机处于发电状态,若上行梯负载等于下行梯负载,电机不做功,否则,电机处于电动状态;
(5)动态检测。
智能自动扶梯节能装置
技术领域
本发明属于自动升降设备技术领域,具体涉及一种智能自动扶梯节能装置。
背景技术
自动扶梯作为一种方便快捷的运输工具,已经越来越多地出现在众多的公共场合中。但是有分析指出,传统扶梯一直处于高能耗、高磨损、低效率的运行状态。传统扶梯包括上行扶梯和下行扶梯,多采用独立驱动方式,自动扶梯之间相互独立,没有能量上的联系。目前,国内安装的扶梯多采用单速交流电机作为主机,配有刹车电机或刹车线圈;扶梯空载时仍是额定速度运行,其缺点为:
当扶梯制动时和下行梯载客量较大时,电机处于发电状态;传统扶梯无回馈功能,只能以热能形式消耗,造成了能量的浪费和设备体积的增大;传统扶梯具有耗能大,机械磨损大,使用寿命低。
在能源日益紧张的今天,如何节约能源已经成为了当今社会的一个主题,国家也在积极提倡建立节能化的社会。在经济高速发展的同时,我国的地铁项目越来越多,为了提高乘客运输率,大量使用扶梯作为代步工具。在地铁站中,扶梯的用电量仅次于空调系统。
因此,如何合理的利用扶梯节省其消耗的电量也成了我们研究的一个方向。
本发明引入多系统联轴传动系统和智能控制系统,结合人流量潮汐原理,实现了负载波动与驱动力的最优匹配,进而实现了节能。主要应用于大型的公共场合,节能效果显著,绿色环保。可以有效地减缓部分地区电能紧缺,供小于求的现状,具有良好的环保效益及广阔的经济效益。
发明内容
本发明的目的在于提供一种结合负载特性与人流量潮汐,可实现负载波动与驱动力最优匹配的智能自动扶梯节能装置。
本发明的目的通过如下技术方案来实现:
智能自动扶梯节能装置主要包括:扶梯式载物传送部分,能量转换传递部分,自动控制部分构成。
扶梯式载物传送装置沿用传统扶梯传送装置,主要由支架,载物台,传动装置等组成。
能量转换传递部分利用齿轮组实现,符合能量守恒定理,下行梯在负载超过临界值后运行时处于发电状态,上行梯运行时处于电动状态,下行梯产生的能量加电机的能量来供给上行梯运动,将传统扶梯中以热能损耗的能量转化为可利用的能量。实现了能源的回收再利用,达到节能效果。
在自动控制部分主要实现了负载波动与驱动力的最优匹配,确立运行扶梯方向、运行模式、运行速度等。其中用到了电磁离合器,通过控制离合器来实现相关模块的开通或者关断,从而可以实现闲时单独控制上行梯或下行梯,忙时上行梯与下行梯相互结合。扶梯分时分模块运行,达到最佳节能效果。通过控制电机来控制扶梯运行速度,当传感器检测到负载较小时,系统会将这一信号反馈给单片机,进而控制扶梯转速。
本发明的下行梯软件流程为:
(1)对系统进行初始化;
(2)检测下行梯负载量;
(3)下行梯负载的当前值与临界负载进行比较;
(4)若当前值小于等于临界负载值,电机处于电动状态,否则,电机处于发电状态;
(5)检测下行扶梯的运行速度;
(6)当前速度与预设速度进行比较,通过控制发电机来控制加载力矩,实现了驱动力和负载波动下的最优匹配;
(7)动态检测。
本发明的上行梯软件流程为:
(1)对系统进行初始化;
(2)检测上行梯、下行梯负载量;
(3)若上行梯上没有负载,则电磁离合器断开,电机处于发电状态;
(4)若上行梯上有负载,则对比上行梯负载量与下行梯负载量,若上行梯负载量远小于下行梯负载量时,电机处于发电状态,若上行梯负载等于下行梯负载,电机不做功,否则,电机处于电动状态;
(5)动态检测
本发明的有益效果在于:
智能自动扶梯节能装置引入多系统联轴传动系统和智能控制系统,结合人流量潮汐原理,实现了负载波动与驱动力的最优匹配,进而实现了节能;实现了扶梯硬件结构的创新设计,打破了传统的固定思维,将各个自动扶梯相互结合起来,使之在能量上有一个联系;提高了电机的运行效率,电机运行效率的提高是节约电能的有效途径,而且电机数量减少,更大程度地节约了电能;维护难度小,维护成本低,符合可持续发展理念。
附图说明
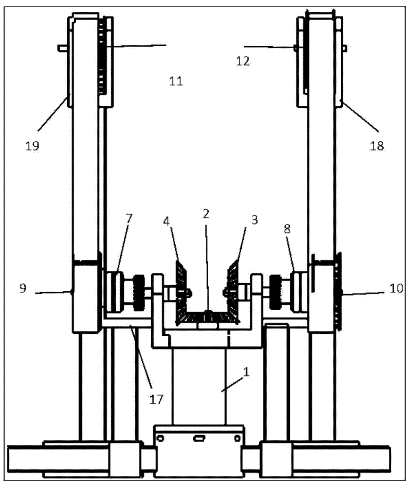
图1为智能自动扶梯节能装置硬件结构示意图;
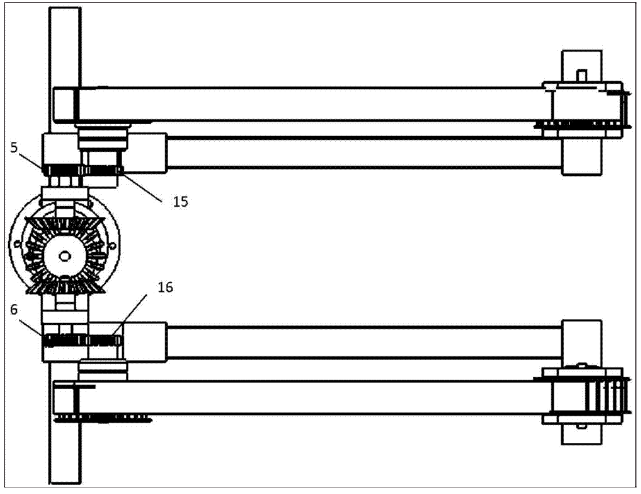
图2为智能自动扶梯节能装置俯视图;
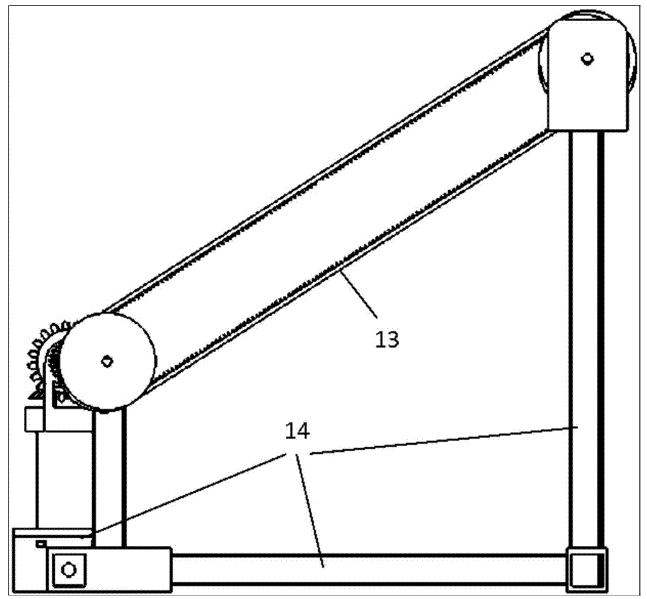
图3为智能自动扶梯节能装置侧视图;
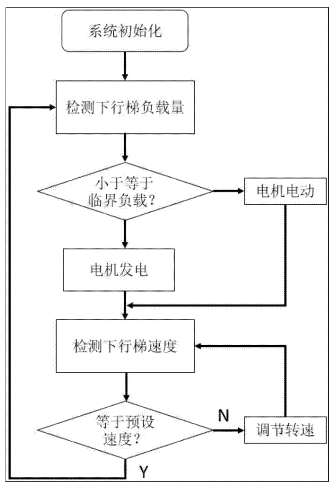
图4为智能自动扶梯节能装置软件部分下行梯流程图;
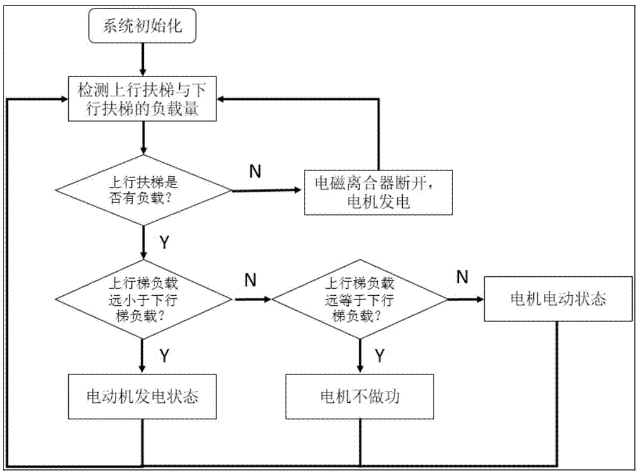
图5为智能自动扶梯节能装置软件部分上行梯流程图。
具体实施方式
下面结合附图对本发明的具体实施方式作进一步说明。
实施例一:
智能自动扶梯节能装置,由支架系统,连接系统,传动系统组成,传动系统由左右对称的两部分组成,连接系统将传动系统的两部分连接,支架系统支撑连接系统和传动系统;
支架系统包括电机套筒1、支架一14、支架二17、特殊结构一18和特殊结构二19;
连接系统包括锥齿轮一2、锥齿轮二3、锥齿轮三4和外壳;
传动系统包括直齿轮一5、直齿轮二6、电磁离合器一7、电磁离合器二8、同步带轮一9、同步带轮二10、同步带轮三11、同步带轮四12、同步带13、电磁离合器配套的直齿轮一15、电磁离合器配套的直齿轮二16。
所述的支架系统中,电机套筒1为上下开口的圆柱体空腔,支架一14为直杆的两端竖直固定两根长短不一的直杆,支架二17为三节平铺的长方体直板并列而成,特殊结构一18和特殊结构二19为四角支柱与两块等大中央开孔直板拼接而成;
电机套筒1固定在支架二17中央上方,支架一14分两部分,分别垂直固定于支架二17两侧。
所述的连接系统中,锥齿轮一2、锥齿轮二3、锥齿轮三4为等大的圆台型齿轮,外壳为三块长方体直板拼接成的U型体且两侧开有等大的孔;
锥齿轮一2与直流电机相连,锥齿轮二3、锥齿轮三4与锥齿轮一2相啮合,且转动过程中,两者呈现相反的运动趋势。
所述的传动系统中,锥齿轮二3与直齿轮二6同轴联接,电磁离合器配套的直齿轮二16与直齿轮二6相互啮合,电磁离合器一7与同步带轮一9相连接,同步带轮一9和同步带轮三11之间用皮带相连;
锥齿轮三4与直齿轮一5同轴联接,电磁离合器配套的直齿轮一15与齿轮5相啮合,电磁离合器二8与同步带轮二10相连接,同步带轮二10、同步带轮四12之间由皮带相互连接在一起;
同步带轮二10、同步带轮四12经皮带相互联接,同步带轮一9、同步带轮二10由支架二17支撑,同步带轮三11由特殊结构二19支撑,同步带轮四12由特殊结构一18支撑。
下行梯软件流程为:
(1)对系统进行初始化;
(2)检测下行梯负载量;
(3)下行梯负载的当前值与临界负载进行比较;
(4)若当前值小于等于临界负载值,电机处于电动状态,否则,电机处于发电状态;
(5)检测下行扶梯的运行速度;
(6)当前速度与预设速度进行比较,通过控制发电机来控制加载力矩,实现了驱动力和负载波动下的最优匹配;
(7)动态检测。
上行梯软件流程为:
(1)对系统进行初始化;
(2)检测上行梯、下行梯负载量;
(3)若上行梯上没有负载,则电磁离合器断开,电机处于发电状态;
(4)若上行梯上有负载,则对比上行梯负载量与下行梯负载量,若上行梯负载量远小于下行梯负载量时,电机处于发电状态,若上行梯负载等于下行梯负载,电机不做功,否则,电机处于电动状态;
(5)动态检测。
实施例二:
结合图1、图2、图3,图1为智能自动扶梯节能装置硬件结构图,图2为智能自动扶梯节能装置俯视图,图3为智能自动扶梯节能装置侧视图,我们可以看出本发明的组成包括:电机套筒1、锥齿轮一2、锥齿轮二3、锥齿轮三4、直齿轮一5、直齿轮二6、电磁离合器一7、电磁离合器二8、同步带轮一9、同步带轮二10、同步带轮三11、同步带轮四12、同步带13、支架一14、电磁离合器配套的直齿轮一15、电磁离合器配套的直齿轮二16、支架二17、特殊结构一18、特殊结构二19组成。电机套筒1嵌套在支架中,锥齿轮一2与直流电机相连,可由电机直接驱使其转动,锥齿轮二3、锥齿轮三4与锥齿轮一2相啮合,且转动过程中,两者呈现相反的运动趋势,电磁离合器配套的直齿轮一15与齿轮5相啮合,带动传动,电磁离合器配套的直齿轮二16与直齿轮二6相互啮合,电磁离合器一7与同步带轮一9相连接,当电磁离合器闭合时,两者同步转动,电磁离合器二8与同步带轮二10相连接,同步带轮一9、同步带轮三11之间用皮带相连,同步带轮二10、同步带轮四12之间由皮带相互连接在一起。
锥齿轮二3与直齿轮二6同轴联接,与电磁离合器配套的直齿轮二16、同步带轮二10组成一个系统,锥齿轮三4与直齿轮一5同轴联接,与直齿轮电磁离合器配套的直齿轮一15、同步带轮一9组成一个系统,两个系统间经锥齿轮一2间接联接。同步带轮二10、同步带轮四12经皮带相互联接,同步带轮一9、同步带轮二10由支架二17支撑,同步带轮三11由特殊结构二19支撑,同步带轮四12由特殊结构一18支撑。通过两个锥齿轮来控制上下行梯的不同转向,同时我们可以看到若干个电磁离合器,离合器与同步带轮同轴联接,并且与直齿轮(与锥齿轮同轴)啮合,下方电机可带动其转动,而且电磁离合其还可以通过给定信号来控制与其所连电路的通断,进而实现扶梯分时分模块运行。
结合图4,图4为智能自动扶梯节能装置软件部分下行梯流程图。本发明的下行梯软件流程为:
(1)对系统进行初始化;
(2)检测下行梯负载量;
(3)下行梯负载的当前值与临界负载进行比较;
(4)若当前值小于等于临界负载值,电机处于电动状态,否则,电机处于发电状态;
(5)检测下行扶梯的运行速度;
(6)当前速度与预设速度进行比较,通过控制发电机来控制加载力矩,实现了驱动力和负载波动下的最优匹配;
(7)动态检测。
结合图5,图5为智能自动扶梯节能装置软件部分上行梯流程图。本发明的上行梯软件流程为:
(1)对系统进行初始化;
(2)检测上行梯、下行梯负载量;
(3)若上行梯上没有负载,则电磁离合器断开,电机处于发电状态;
(4)若上行梯上有负载,则对比上行梯负载量与下行梯负载量,若上行梯负载量远小于下行梯负载量时,电机处于发电状态,若上行梯负载等于下行梯负载,电机不做功,否则,电机处于电动状态;
(5)动态检测
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。

Copyright © 宁波鄞州盖奇同步带轮有限公司 2007-2022 All Rights Reserved.
电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:浙江省宁波市鄞州区姜山镇蔡郎桥村姜南路39-2 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持 浙公网安备33021202003319号
电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:浙江省宁波市鄞州区姜山镇蔡郎桥村姜南路39-2 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持 浙公网安备33021202003319号