产品搜索
当前位置:首页->全轮驱动、全轮转向的移动装置
全轮驱动、全轮转向的移动装置
【申请公布号:CN110171471A;申请权利人:洛阳履坦智能科技有限公司;发明设计人: 高峰; 左新凯; 马平川; 解晓琳; 蒋立; 黄川;】
摘要:
本发明涉及一种全轮驱动、全轮转向的移动装置,包括一动力源、由该动力源驱动的沿Y轴横向设置的输入轴;所述输入轴两侧各与一输出轮同轴连接,所述输出轮两侧各设有至少一轴向为Y向的导轮Ⅰ,及位于相邻一对车轮各自上方位置设有轴向为Z向的联动带轮;所述联动带轮、导轮Ⅰ、输出轮之间通过可扭曲变向的同步带实现传动;所述联动带轮两侧各自通过至少一轴向沿X向的导轮Ⅱ与轴向沿Y向的行走带轮实现带传动;所述行走带轮与车轮同轴连接或同轴传动。本发明通过柔性传动结构的设计,通过动力传输方向的多次改变,实现单个动力源条件下的全轮行走驱动,与转向动力巧妙实现良好配合。
主权项:
1.一种全轮驱动、全轮转向的移动装置,其特征在于:包括一动力源、由该动力源驱动的沿Y轴横向设置的输入轴(1);所述输入轴(1)两侧各与一输出轮同轴连接,所述输出轮两侧各设有至少一轴向为Y向的导轮Ⅰ(14),及位于相邻一对车轮(12)各自上方位置设有轴向为Z向的联动带轮;所述联动带轮、导轮Ⅰ(14)、输出轮之间通过可扭曲变向的同步带实现传动;所述联动带轮两侧各自通过至少一轴向沿X向的导轮Ⅱ(21)与轴向沿Y向的行走带轮实现带传动;所述行走带轮与车轮(12)同轴连接或同轴传动。
要求:
1.一种全轮驱动、全轮转向的移动装置,其特征在于:
包括一动力源、由该动力源驱动的沿Y轴横向设置的输入轴(1);
所述输入轴(1)两侧各与一输出轮同轴连接,所述输出轮两侧各设有至少一轴向为Y向的导轮Ⅰ(14),及位于相邻一对车轮(12)各自上方位置设有轴向为Z向的联动带轮;所述联动带轮、导轮Ⅰ(14)、输出轮之间通过可扭曲变向的同步带实现传动;
所述联动带轮两侧各自通过至少一轴向沿X向的导轮Ⅱ(21)与轴向沿Y向的行走带轮实现带传动;所述行走带轮与车轮(12)同轴连接或同轴传动。
2.如权利要求1所述的全轮驱动、全轮转向的移动装置,其特征在于:每个车轮(12)各自对应一转向电机(10),所述转向电机(10)的输出轴设置为与所述联动带轮同轴。
3.如权利要求1所述的全轮驱动、全轮转向的移动装置,其特征在于:
所述动力源是电动机(19),所述输出轮是输出带轮(16),所述联动带轮是双联同步带轮(4),所述输出轮是输出带轮(16);
所述双联同步带轮、导轮Ⅰ(14)、输出带轮(16)通过一级同步带同步传动;
所述联动带轮、导轮Ⅱ(21)、行走带轮(13)通过二级同步带(6)同步传动。
4.如权利要求2所述的全轮驱动、全轮转向的移动装置,其特征在于:所述车轮(12)固定在L形的转向节臂(18)上,转向节臂一端与转向电机(10)的输出轴同轴连接,另一端带动车轮(12)实施转动动作。
5.如权利要求2所述的全轮驱动、全轮转向的移动装置,其特征在于:所述导轮Ⅱ(21)固定在所述转向节臂(18)上。
6.如权利要求5所述的全轮驱动、全轮转向的移动装置,其特征在于:所述双联同步带轮(4)、转向节臂(18)、导轮Ⅰ(14)、导轮Ⅱ(21)均固定在摆动桥(17)上,所述摆动桥(17)通过轴承与轴系相连并可绕轴系旋转;转向节臂(18)与摆动桥(17)相连并能够绕转向电机轴轴线旋转。
7.如权利要求5所述的全轮驱动、全轮转向的移动装置,其特征在于:平衡摇臂(20)与两侧摆动桥(17)相连。
全轮驱动、全轮转向的移动装置
技术领域
本发明涉及一种移动装置,具体来说,是一种全轮转向移动装置。
背景技术
现有的能够实现全轮驱动、全轮转向移动装置,在轮子驱动/转向的动力和传动上,一般结构设计都比较复杂,一般行走驱动需要两个以上的动力源,如果只采用一个动力源,则传动结构会很复杂,设计和制造难度均较大,同时往往会空间不足,成本较高。
发明内容
本发明旨在提供一种全轮转向移动装置,通过柔性传动结构的设计,通过动力传输方向的多次改变,实现单个动力源条件下的全轮行走驱动,与转向动力巧妙实现良好配合。
本发明采取以下技术方案:
一种全轮驱动、全轮转向的移动装置,包括一动力源、由该动力源驱动的沿Y轴横向设置的输入轴1;所述输入轴1两侧各与一输出轮同轴连接,所述输出轮两侧各设有至少一轴向为Y向的导轮Ⅰ14,及位于相邻一对车轮12各自上方位置设有轴向为Z向的联动带轮;所述联动带轮、导轮Ⅰ14、输出轮之间通过可扭曲变向的同步带实现传动;所述联动带轮两侧各自通过至少一轴向沿X向的导轮Ⅱ21与轴向沿Y向的行走带轮实现带传动;所述行走带轮与车轮12同轴连接或同轴传动。
进一步的,每个车轮12各自对应一转向电机10,所述转向电机10的输出轴设置为与所述联动带轮同轴。
进一步的,所述动力源是电动机19,所述输出轮是输出带轮16,所述联动带轮是双联同步带轮4,所述输出轮是输出带轮16;所述双联同步带轮、导轮Ⅰ14、输出带轮16通过一级同步带同步传动;所述联动带轮、导轮Ⅱ21、行走带轮13通过二级同步带6同步传动。
更进一步的,所述车轮12固定在L形的转向节臂18上,转向节臂一端与转向电机10的输出轴同轴连接,另一端带动车轮12实施转动动作。
更进一步的,所述导轮Ⅱ21固定在所述转向节臂18上。
再进一步的,所述双联同步带轮4、转向节臂18、导轮Ⅰ14、导轮Ⅱ21均固定在摆动桥17上,所述摆动桥17通过轴承与轴系相连并可绕轴系旋转;转向节臂18与摆动桥17相连并能够绕转向电机轴轴线旋转。
进一步的,平衡摇臂20与两侧摆动桥17相连。
本发明的有益效果在于:
1)巧妙设计带传动形式,使转向节臂动力输入方向与转向动力输入相同,然后通过同步带的扭转,使转向节臂动力输出方向转90°,与车轮旋转方向相同,从而完成车轮行驶的同时,也可以进行转向,替换掉了传统的转向梯形机构,减轻重量,同时不受转向梯形限制,四个车轮可以各自独立完成转向;同步带传动也替换了传统的传动零件,减轻了重量。
2)使用同步带轮及导轮,完成了动力传输方向的改变。四个轮子皆为驱动轮,每个轮子可由转向电机驱动完成独立转向,四个轮子配合可实现直线行驶、前轮转向、全轮转向、原地转向等功能,具有结构轻便、动力传递效率高、控制精确等特点。
3)通过动力传输方向的多次改变,实现单个动力源条件下的全轮行走驱动,同时与各车轮独立设置的转向动力实现巧妙配合。
4)转向幅度大,X向和Y向均可作为行进方向,可以不区分前后和两侧方向。
附图说明
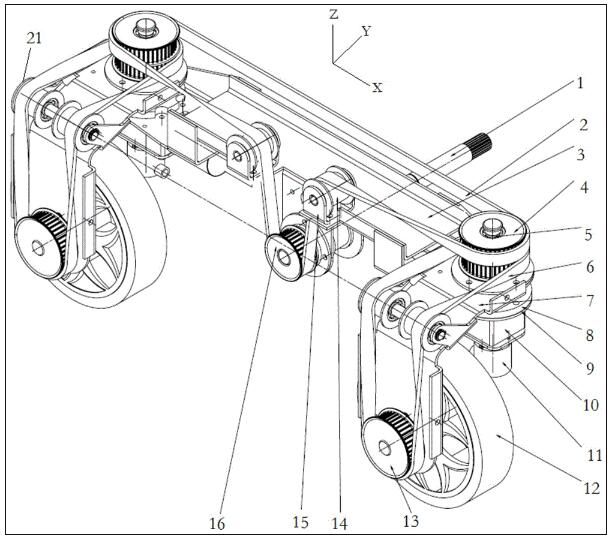
图1是本发明全轮驱动、全轮转向的移动装置其中一摆动桥及其上固定的部件的示意图。
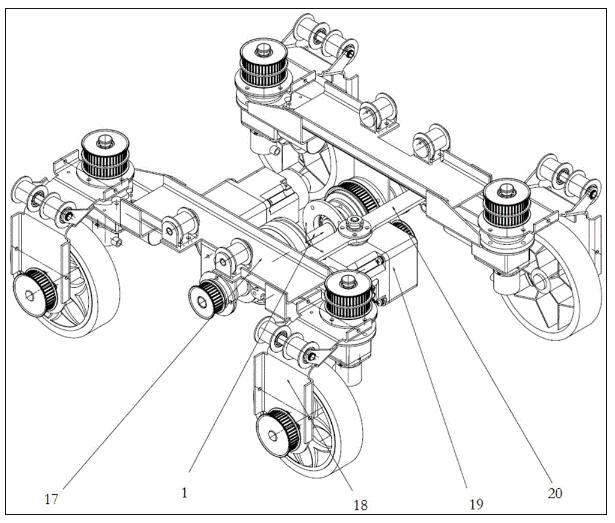
图2是本发明全轮驱动、全轮转向的移动装置的整体结构示意图。
图中,1、输入轴;2、一级同步带;3、摆动桥中钣金件;4、双联同步带轮;5、同步带轮轴;6、二级同步带;7、转向节臂钣金件;8、同步带轮轴装端盖;9、摆动桥金件;10、转向电机;11、编码器;12、车轮;13、行走带轮;14、导轮Ⅰ;15、导轮支架;16、输出带轮;17.摆动桥,18.转向节臂,19.电动机,20.平衡摇臂,21.导轮Ⅱ。
具体实施方式
下面结合附图和具体实施例对本发明进一步说明。
参见图1-图2,一种全轮驱动、全轮转向的移动装置,包括一动力源、由该动力源驱动的沿Y轴横向设置的输入轴1;所述输入轴1两侧各与一输出轮同轴连接,所述输出轮两侧各设有至少一轴向为Y向的导轮Ⅰ14,及位于相邻一对车轮12各自上方位置设有轴向为Z向的联动带轮;所述联动带轮、导轮Ⅰ14、输出轮之间通过可扭曲变向的同步带实现传动;所述联动带轮两侧各自通过至少一轴向沿X向的导轮Ⅱ21与轴向沿Y向的行走带轮实现带传动;所述行走带轮与车轮12同轴连接或同轴传动。
在此实施例中,参见图1,每个车轮12各自对应一转向电机10,所述转向电机10的输出轴设置为与所述联动带轮同轴。
在此实施例中,参见图1-2,所述动力源是电动机19,所述输出轮是输出带轮16,所述联动带轮是双联同步带轮4,所述输出轮是输出带轮16;所述双联同步带轮、导轮Ⅰ14、输出带轮16通过一级同步带同步传动;所述联动带轮、导轮Ⅱ21、行走带轮13通过二级同步带6同步传动。
在此实施例中,参见图2,所述车轮12固定在L形的转向节臂18上,转向节臂一端与转向电机10的输出轴同轴连接,另一端带动车轮12实施转动动作。
在此实施例中,参见图1-2,所述导轮Ⅱ21固定在所述转向节臂18上。
在此实施例中,参见,1-2,所述双联同步带轮4、转向节臂18、导轮Ⅰ14、导轮Ⅱ21均固定在摆动桥17上,所述摆动桥17通过轴承与轴系相连并可绕轴系旋转;转向节臂18与摆动桥17相连并能够绕转向电机轴轴线旋转。
工作时,电动机19通过同步带轮、同步带与轴系相连,摆动桥17通过轴承与轴系相连并可绕轴系旋转,转向节臂18与摆动桥17相连并可以绕转向电机轴轴线旋转,安装在轴系上的输出带轮16与转向节臂18上的双联同步带轮4通过同步带相连,平衡摇臂20与两侧摆动桥17相连。
车轮旋转方向与车轮转向方向垂直。此带传动形式使转向节臂动力输入方向与转向动力输入相同,然后通过同步带的扭转,使转向节臂动力输出方向转90°,与车轮旋转方向相同,从而完成车轮行驶的同时,也可以进行转向,替换掉了传统的转向梯形机构,减轻重量,同时不受转向梯形限制,四个车轮可以各自独立完成转向。同步带传动也替换了传统的传动零件,减轻了重量。
使用同步带轮及导轮,完成了动力传输方向的改变。四个轮子皆为驱动轮,每个轮子可由转向电机驱动完成独立转向,四个轮子配合可实现直线行驶、前轮转向、全轮转向、原地转向等功能。具有结构轻便、动力传递效率高、控制精确等特点。
以上是本发明的优选实施例,本领域普通技术人员还可以在此基础上进行各种变换或改进,在不脱离本发明总的构思的前提下,这些变换或改进都有应当属于本发明要求保护的范围之内。

Copyright © 宁波鄞州盖奇同步带轮有限公司 2007-2022 All Rights Reserved.
电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:浙江省宁波市鄞州区姜山镇蔡郎桥村姜南路39-2 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持 浙公网安备33021202003319号
电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:浙江省宁波市鄞州区姜山镇蔡郎桥村姜南路39-2 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持 浙公网安备33021202003319号