产品搜索
当前位置:首页->机械臂转动关节及医生机械臂
机械臂转动关节及医生机械臂
【申请公布号:CN110393587A;申请权利人:山东威高手术机器人有限公司;发明设计人: 王炳强; 孔康; 张淮峰; 李建民; 江万里; 孙明云; 隋鹏锦; 孙之建;】
摘要:
本发明涉及一种机械臂转动关节及医生机械臂,其解决了现有微创手术机器人中机械臂的转动关节体积较大,关节运动检测装置的测量精度低的技术问题,其包括基座、第一臂杆、抱闸、转轴、编码器、编码器安装板、第一同步带轮、同步带和第二同步带轮,抱闸与基座固定连接,第一同步带轮与基座固定连接,转轴通过下轴承与基座连接,转轴的上部分与第一臂杆的下部固定连接,第一臂杆的上部通过上轴承与基座连接,转轴穿过第一同步带轮的中心孔,转轴的下部分设于抱闸的轴孔中,编码器与第一臂杆固定连接,第二同步带轮与编码器的转轴固定连接,同步带连接于第二同步带轮和第一同步带轮之间。本发明广泛用于医疗器械技术领域。
主权项:
1.一种机械臂转动关节,其特征在于,包括基座、第一臂杆、抱闸、转轴、编码器、第一同步带轮、同步带和第二同步带轮,所述抱闸与基座固定连接,所述第一同步带轮与基座固定连接,所述转轴通过下轴承与基座连接,所述转轴的上部分与第一臂杆的下部固定连接,第一臂杆的上部通过上轴承与基座连接,所述转轴穿过第一同步带轮的中心孔,所述抱闸设有抱闸块和轴孔,所述转轴的下部分设于抱闸的轴孔中,抱闸的抱闸块与转轴连接,所述编码器与第一臂杆固定连接,所述第二同步带轮与编码器的转轴固定连接,所述同步带连接于第二同步带轮和第一同步带轮之间。
要求:
1.一种机械臂转动关节,其特征在于,包括基座、第一臂杆、抱闸、转轴、编码器、第一同步带轮、同步带和第二同步带轮,所述抱闸与基座固定连接,所述第一同步带轮与基座固定连接,所述转轴通过下轴承与基座连接,所述转轴的上部分与第一臂杆的下部固定连接,第一臂杆的上部通过上轴承与基座连接,所述转轴穿过第一同步带轮的中心孔,所述抱闸设有抱闸块和轴孔,所述转轴的下部分设于抱闸的轴孔中,抱闸的抱闸块与转轴连接,所述编码器与第一臂杆固定连接,所述第二同步带轮与编码器的转轴固定连接,所述同步带连接于第二同步带轮和第一同步带轮之间。
2.根据权利要求1所述的机械臂转动关节,其特征在于,所述机械臂转动关节还包括连接轴,所述连接轴与基座固定连接,所述上轴承与连接轴连接。
3.一种机械臂转动关节,其特征在于,包括基座、转轴、第一臂杆、下轴承、上轴承、编码器、第一同步带轮和第二同步带轮,所述转轴与第一臂杆固定连接,所述转轴的上端通过上轴承与基座连接,所述转轴的下端通过下轴承与基座连接,所述第一同步带轮与基座固定连接,所述转轴穿过第一同步带轮的中心孔,所述编码器与第一臂杆固定连接,所述第二同步带轮与编码器的转轴固定连接,所述同步带连接于第二同步带轮和第一同步带轮之间。
4.一种机械臂转动关节,其特征在于,包括基座、带轮轴、抱闸及编码器安装座、抱闸、转轴、编码器、固定同步带轮、转动同步带轮、同步带、钢带、大钢带轮和小钢带轮,所述带轮轴与基座固定连接,所述抱闸及编码器安装座的左端通过轴承与带轮轴连接,所述抱闸与抱闸及编码器安装座固定连接,所述抱闸设有轴孔,所述编码器固定连接于抱闸及编码器安装座上,所述固定同步带轮与带轮轴21固定连接,所述转动同步带轮与编码器中的转轴固定连接,所述同步带连接于固定同步带轮和转动同步带轮之间,所述转轴通过轴承与抱闸及编码器安装座的右端转动连接,转轴的下部分设于抱闸的轴孔中,所述大钢带轮与带轮轴固定连接,大钢带轮的圆周上设有若干个连接柱,所述小钢带轮与转轴固定连接,小钢带轮的圆周上设有若干个连接柱,所述钢带上设有若干个圆孔,钢带的左端套在大钢带轮上,大钢带轮上的连接柱穿过钢带左侧的圆孔,钢带的右端套在小钢带轮上,小钢带轮上的连接柱穿过钢带右侧的圆孔。
5.一种医生机械臂,其特征在于,包括如权利要求球1-4任意一项所述的机械臂转动关节。
6.一种医生机械臂,其特征在于,包括基座、第一臂杆、第二臂杆和转动连接座,所述第一臂杆的后端与基座通过如权利要求1-4任意一项所述的机械臂转动关节连接,第一臂杆能够在水平面上转动;所述第二臂杆与转动连接座通过如权利要求1-4任意一项所述的机械臂转动关节连接,第二臂杆能够在垂直面上转动;转动连接座与第一臂杆的前端通过如权利要求1-4任意一项所述的机械臂转动关节连接,转动连接座能够在水平面上转动。
机械臂转动关节及医生机械臂
技术领域
本发明涉及微创外科手术机器技术领域,具体而言,涉及一种机械臂转动关节及医生机械臂。
背景技术
参考申请公布号为CN109091237A、名称为微创手术器械辅助系统的中国发明专利申请,以腹腔镜为代表的微创外科被誉为20世纪医学科学对人类文明的重要贡献之一,微创手术操作是指医生利用细长的手术工具通过人体表面的微小切口探入到体内进行手术操作的。它与传统的开口手术相比具有手术切口小、出血量少、术后疤痕小、恢复时间快等优点,这使得病人遭受的痛苦大大减少;因此微创外科被广泛的应用于临床手术。
参考申请公布号为CN109091238A、名称为分体式微创手术器械辅助系统的中国发明专利申请,微创外科手术机器人系统包括医生操作台,外科医生通过操作医生机械臂来精准地控制患者操作台的器械机械臂上的一个或多个手术器械执行各种手术动作。
外科手术器械是外科手术操作的必备工具,其可以执行不同功能,包括夹持、切除、切割、缝合、吻合等。外科手术器械具有不同的配置,其包括执行末端,腕节、器械杆、器械盒等,外科手术器械被插入,穿过开口,以实施远程外科手术。
然而,微创手术机器人在带来诸多益处的同时,也存在一系列技术缺陷,如:1)手术设备结构复杂,体积庞大,占用手术室的空间,微创手术机器人中机械臂的转动关节体积较大;2)手术设备昂贵,手术成本高,难以在国内医院普及;3)机械臂的关节运动检测装置的测量精度低。因此,需要对微创手术机器人结构不断优化,降低成本,缩小体积,以克服上述缺点。
发明内容
本发明就是为了解决现有微创手术机器人中机械臂的转动关节体积较大,关节运动检测装置的测量精度低的技术问题,提供了一种体积小,关节运动参数测量更准确的机械臂转动关节及医生机械臂。
本发明提供一种机械臂转动关节,包括基座、第一臂杆、抱闸、转轴、编码器、第一同步带轮、同步带和第二同步带轮,抱闸与基座固定连接,第一同步带轮与基座固定连接,转轴通过下轴承与基座连接,转轴的上部分与第一臂杆的下部固定连接,第一臂杆的上部通过上轴承与基座连接,转轴穿过第一同步带轮的中心孔,抱闸设有抱闸块和轴孔,转轴的下部分设于抱闸的轴孔中,抱闸的抱闸块与转轴连接,编码器与第一臂杆固定连接,第二同步带轮与编码器的转轴固定连接,同步带连接于第二同步带轮和第一同步带轮之间。
优选地,机械臂转动关节还包括连接轴,连接轴与基座固定连接,上轴承与连接轴连接。
本发明还提供一种机械臂转动关节,包括基座、转轴、第一臂杆、下轴承、上轴承、编码器、第一同步带轮和第二同步带轮,转轴与第一臂杆固定连接,转轴的上端通过上轴承与基座连接,转轴的下端通过下轴承与基座连接,第一同步带轮与基座固定连接,转轴穿过第一同步带轮的中心孔,所述编码器与第一臂杆固定连接,所述第二同步带轮与编码器的转轴固定连接,同步带连接于第二同步带轮和第一同步带轮之间。
本发明还提供一种机械臂转动关节,包括基座、带轮轴、抱闸及编码器安装座、抱闸、转轴、编码器、固定同步带轮、转动同步带轮、同步带、钢带、大钢带轮和小钢带轮,带轮轴与基座固定连接,抱闸及编码器安装座的左端通过轴承与带轮轴连接,抱闸与抱闸及编码器安装座固定连接,抱闸设有轴孔,编码器固定连接于抱闸及编码器安装座上,固定同步带轮与带轮轴21固定连接,转动同步带轮与编码器中的转轴固定连接,同步带连接于固定同步带轮和转动同步带轮之间,转轴通过轴承与抱闸及编码器安装座的右端转动连接,转轴的下部分设于抱闸的轴孔中,大钢带轮与带轮轴固定连接,大钢带轮的圆周上设有若干个连接柱,小钢带轮与转轴固定连接,小钢带轮的圆周上设有若干个连接柱,钢带上设有若干个圆孔,钢带的左端套在大钢带轮上,大钢带轮上的连接柱穿过钢带左侧的圆孔,钢带的右端套在小钢带轮上,小钢带轮上的连接柱穿过钢带右侧的圆孔。
本发明还提供一种医生机械臂,包括前述机械臂转动关节。
本发明还提供一种医生机械臂,包括基座、第一臂杆、第二臂杆和转动连接座,第一臂杆的后端与基座通过前述的机械臂转动关节连接,第一臂杆能够在水平面上转动;第二臂杆与转动连接座通过前述的机械臂转动关节连接,第二臂杆能够在垂直面上转动;转动连接座与第一臂杆的前端通过前述的机械臂转动关节连接,转动连接座能够在水平面上转动。
本发明的有益效果是,具有结构轻巧、易操纵,精度高,体积小,成本低的优势,可实时、准确地反馈机械臂关节运动参数,而且具有锁紧关节的功能。本发明尤其适用于低速、轻载的使用条件,如以主从跟随形式操纵的微创手术机器人的医生机械臂转动关节。
本发明进一步的特征,将在以下具体实施方式的描述中,得以清楚地记载。
附图说明
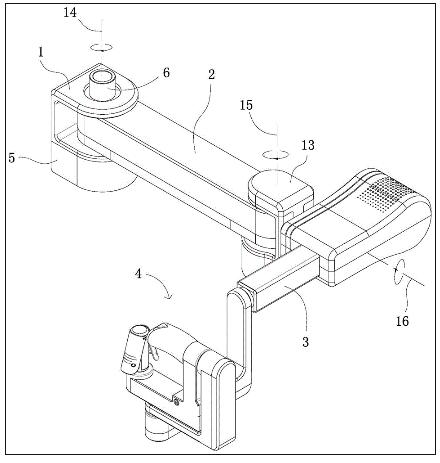
图1是医生机械臂的结构示意图;
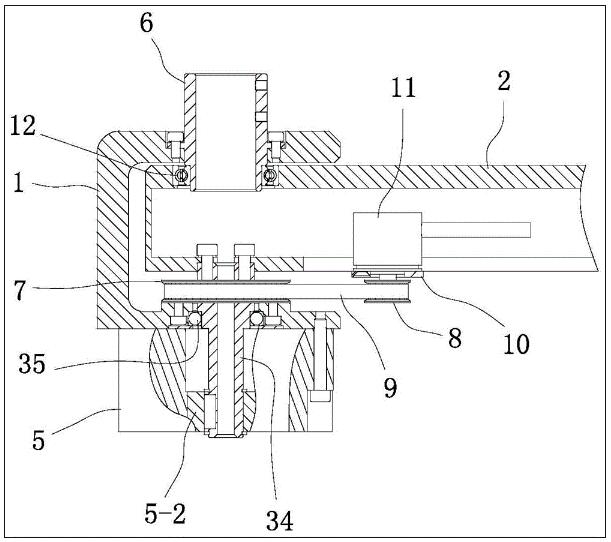
图2是第一臂杆和基座之间的关节结构示意图;
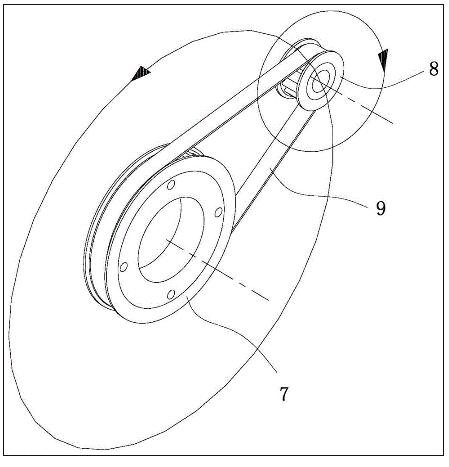
图3是第一同步带轮和第二同步带轮的摆动及转动角度的比例关系示意图;
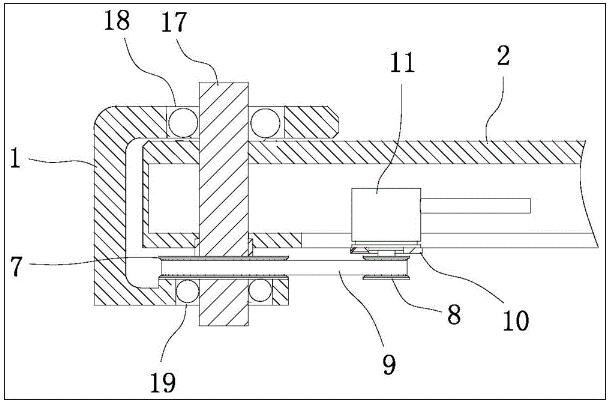
图4是不设置抱闸的关节结构示意图;
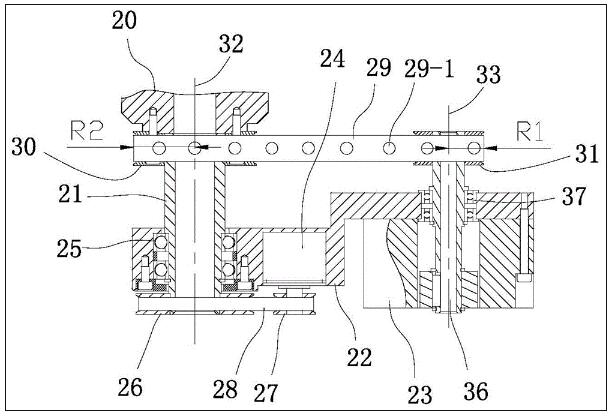
图5是增加关节锁紧力矩的关节结构示意图;
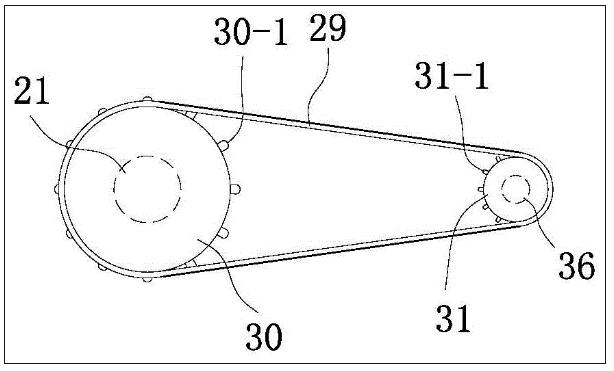
图6是钢带的连接示意图。
图中符号说明:
1.基座,2.第一臂杆,3.第二臂杆,4.手腕,5.抱闸,5-2.抱闸块,6.连接轴,7.第一同步带轮,8.第二同步带轮,9.同步带,10.编码器安装板,11.编码器,12.上轴承,13.转动连接座,14.第一关节的转动轴线,15.第二关节的转动轴线,16.第三关节的转动轴线;17.转轴,18.上轴承,19.下轴承;20.基座,21.带轮轴,22.抱闸及编码器安装座,23.抱闸,24.编码器,25.轴承,26.固定同步带轮,27.转动同步带轮,28.同步带,29.钢带,29-1.圆孔,30.大钢带轮,31.小钢带轮,32.轴线一,33.轴线二;34.转轴,35.下轴承;36.转轴,37.轴承。
具体实施方式
以下参照附图,以具体实施例对本发明作进一步详细说明。
如图1所示的医生机械臂,第一臂杆2的后端与基座1通过关节连接,第一臂杆2能够在水平面上转动,第二臂杆3与转动连接座13通过关节连接,第二臂杆3能够在垂直面上转动,转动连接座13与第一臂杆2的前端通过关节连接,转动连接座13能够在水平面上转动。
如图2所示的第一臂杆2与基座1之间的关节结构,通过螺钉将抱闸5固定安装在基座1上,第一同步带轮7与基座1固定连接,连接轴6通过螺钉与基座1固定连接,第一臂杆2的后端的上部通过上轴承12与连接轴6转动连接。转轴34的上部分与第一臂杆2的后端的下部通过螺钉固定连接,转轴34通过下轴承35与基座1转动连接。转轴34穿过第一同步带轮7的中心孔。抱闸5采用现有技术的公知结构,其设有抱闸块5-2和轴孔,转轴34的下部分设于抱闸5的轴孔中,抱闸块5-2通过平键与转轴34连接,断电状态下,抱闸块5-2被抱紧,转轴34进而被锁紧而不能转动;通电状态下,抱闸块5-2被释放,转轴34进而能够在下轴承35的支撑下转动。编码器安装板10与第一臂杆2固定连接,编码器11与编码器安装板10固定连接,第二同步带轮8与编码器11的转轴固定连接(第二同步带轮8转动能够带动编码器11的转轴转动),同步带9连接于第二同步带轮8和第一同步带轮7之间。
关节的位置反馈功能依靠编码器实现,使编码器11动作产生信号的过程是:基座1静止不动,使第一臂杆2转动,同步带9就会在第一同步带轮7上缠动,并带动第二同步带轮8转动,也就是实现如图3所示的行星运动,第二同步带轮8以第一同步带轮7的轴线为中心进行公转的同时,第二同步带轮8自身进行自转(自转的方向与公转方向相反)。设第二同步带轮8公转的角速度为ω1、角度为θ1,第二同步带轮8自转的角速度为ω2、角度为θ2,第一同步带轮7的半径为R1,第二同步带轮8的半径为R2,则有ω1*R1=ω2*R2,即θ1/θ2=ω1/ω2=R2/R1,由此可见,可实现变速、变角度传动。
需要说明的是,如果第一臂杆2静止不动,使基座1转动,在第一同步带轮7转动带动第二同步带轮8转动,编码器11也会产生信号。总之,只要第一臂杆2和基座1相对运动,编码器11就会检测出运动数据。
连接轴6可以被安装在手术机器人系统的某个支架上。
对于作为制动器使用的抱闸5,其主要作用是在不需要第一臂杆2转动动作的时候将第一臂杆2锁死。那么,不设置抱闸的关节结构如图4所示,转轴17与第一臂杆2的后端固定连接,转轴17的上端通过上轴承18与基座1连接,转轴17的下端通过下轴承19与基座1连接,第一同步带轮7与基座1固定连接,转轴17穿过第一同步带轮7的中心孔。编码器安装板10与第一臂杆2固定连接,编码器11与编码器安装板10固定连接,第二同步带轮8与编码器11的转轴固定连接(第二同步带轮8转动能够带动编码器11的转轴转动),同步带9连接于第二同步带轮8和第一同步带轮7之间。编码器11的检测工作过程与图3中编码器的工作过程相同。
对于第二臂杆3与转动连接座13之间的关节结构,也可以采用图2或图4所示结构。对于转动连接座13与第一臂杆2之间的关节结构,也可以采用图2或图4所示结构。
如图5所示的增加关节锁紧力矩的关节结构,带轮轴21与基座20固定连接,抱闸及编码器安装座22的左端通过轴承25与带轮轴21转动连接,抱闸23与抱闸及编码器安装座22的右端固定连接,抱闸23设有抱闸块和轴孔,编码器24固定安装在抱闸及编码器安装座22上,固定同步带轮26与带轮轴21的下端固定连接,转动同步带轮27与编码器24中的转轴固定连接,同步带28连接于固定同步带轮26和转动同步带轮27之间,转轴36通过轴承37与抱闸及编码器安装座22的右端转动连接,转轴36的下部分设于抱闸23的轴孔中,抱闸23的抱闸块通过平键与转轴36连接;参考图6,大钢带轮30与带轮轴21的上部分固定连接,大钢带轮30的圆周上设有若干个连接柱30-1,小钢带轮31与转轴36的上部固定连接,小钢带轮31的圆周上设有若干个连接柱31-1,钢带29上设有若干个圆孔29-1,钢带29的左端套在大钢带轮30上(连接柱30-1穿过钢带29左侧的圆孔29-1),钢带29的右端套在小钢带轮31上(连接柱31-1穿过钢带29右侧的圆孔29-1),实现传动。转动关节的锁紧依靠钢带传动及抱闸的锁紧功能实现,抱闸23在通电状态下,抱闸及编码器安装座22以带轮轴21为中心转动,转动同步带轮27以轴线一32为中心公转的同时自转(编码器24产生信号),转轴36也会以轴线一32为中心公转的同时自转。断电状态下,抱闸23的抱闸块被抱紧,转轴36进而被锁紧不能自转,在钢带29的作用下,抱闸及编码器安装座22不能以轴线一32为中心转动,进而实现抱闸及编码器安装座22与带轮轴21的锁紧制动。设抱闸23的理论最大锁紧力矩为M1 n.m,关节理论最大锁紧力矩为M2 n.m。转轴36与钢带29啮合处半径为R1,带轮轴21与钢带29啮合处半径为R2。则有M1/R1=M2/R2,即M2=M1R2/R1。若R2>R1,则关节锁紧力矩增大。钢带传动结构弹性变形量小,不打滑,抗拉强度高。
应用图5所示的关节结构时,将机械臂的臂杆与抱闸及编码器安装座22固定连接。
以上示意性的对本发明及其实施方式进行了描述,该描述没有限制性,附图中所示的也只是本发明的实施方式之一,实际的结构并不局限于此。所以,如果本领域的技术人员受其启示,在不脱离本发明创造宗旨的情况下,采用其它形式的零件构型、驱动装置以及连接方式不经创造性的设计与该技术方案相似的结构方式及实施例,均应属于本发明的保护范围。

Copyright © 宁波鄞州盖奇同步带轮有限公司 2007-2022 All Rights Reserved.
电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:浙江省宁波市鄞州区姜山镇蔡郎桥村姜南路39-2 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持 浙公网安备33021202003319号
电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:浙江省宁波市鄞州区姜山镇蔡郎桥村姜南路39-2 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持 浙公网安备33021202003319号