产品搜索
当前位置:首页->一种用于智能打包坐便器的塑料袋打包机构
一种用于智能打包坐便器的塑料袋打包机构
【申请公布号:CN111824518A;申请权利人:上海青宇科技有限公司;发明设计人: 王磊; 张奖;】
摘要:
本发明提供了一种用于智能打包坐便器的塑料袋打包机构。包括坐便器本体、电机驱动组和封口切割装置,其中,所述坐便器本体包括底座、导向杆、压袋杆、软胶垫、同步带、第一带轮、第二带轮、第一连接轴、第二连接轴和第一齿轮。其中本发明的有益效果是:解决了现有技术中智能坐便器不管是直接清洗还是套用塑料袋,整个过程都十分麻烦,且不卫生的技术问题。本发明可以更加高效、便捷、卫生地处理排泄物。
主权项:
1.一种用于智能打包坐便器的塑料袋打包机构,其特征在于:包括坐便器本体、电机驱动组件和封口切割装置;其中,所述坐便器本体包括底座、导向杆、压袋杆、软胶垫、同步带、第一带轮、第二带轮、第一连接轴、第二连接轴和第一齿轮;所述底座安装于所述坐便器本体内,所述底座两边设有一对导向杆,所述压袋杆安装于所述导向杆上,所述压袋杆装有所述软胶垫,所述同步带设置于所述压袋杆两端,所述第一带轮通过所述第一连接轴连接固定,所述第二带轮通过所述第二连接轴连接固定,所述第一齿轮位于所述第一连接轴上,所述第一齿轮连接所述电机驱动组件。
要求:
1.一种用于智能打包坐便器的塑料袋打包机构,其特征在于:包括坐便器本体、电机驱动组件和封口切割装置;其中,
所述坐便器本体包括底座、导向杆、压袋杆、软胶垫、同步带、第一带轮、第二带轮、第一连接轴、第二连接轴和第一齿轮;
所述底座安装于所述坐便器本体内,所述底座两边设有一对导向杆,所述压袋杆安装于所述导向杆上,所述压袋杆装有所述软胶垫,所述同步带设置于所述压袋杆两端,所述第一带轮通过所述第一连接轴连接固定,所述第二带轮通过所述第二连接轴连接固定,所述第一齿轮位于所述第一连接轴上,所述第一齿轮连接所述电机驱动组件。
2.根据权利要求1所述的一种用于智能打包坐便器的塑料袋打包机构,其特征在于:所述坐便器本体1还包括缓冲杆;
所述缓冲杆滑动安装于所述导向杆上,所述缓冲杆与所述封口切割装置通过弹簧连接,缓冲杆前部设置有卡环。
3.根据权利要求2所述的一种用于智能打包坐便器的塑料袋打包机构,其特征在于:所述导向杆材质为不锈钢。
4.根据权利要求3所述的一种用于智能打包坐便器的塑料袋打包机构,其特征在于:所述软胶垫为耐高温发泡硅胶材质。
5.根据权利要求4所述的一种用于智能打包坐便器的塑料袋打包机构,其特征在于:所述电机驱动组件包括电机;所述电机为直流电机。
6.根据权利要求5所述的一种用于智能打包坐便器的塑料袋打包机构,其特征在于:所述压袋杆上下侧两端具有三角形双翼。
7.根据权利要求6所述的一种用于智能打包坐便器的塑料袋打包机构,其特征在于:所述压袋杆两侧上部设有紧定螺钉孔。
8.根据权利要求7所述的一种用于智能打包坐便器的塑料袋打包机构,其特征在于:所述缓冲杆上下侧两端也设有双翼结构。
9.根据权利要求8所述的一种用于智能打包坐便器的塑料袋打包机构,其特征在于:所述坐便器本体还包括第一传感器和第二传感器;
所述第一传感器设置于所述压袋杆的初始位置,所述第二传感器设置于所述压袋杆与所述封口切割装置贴合处。
一种用于智能打包坐便器的塑料袋打包机构
技术领域
本发明涉及智能坐便器领域,特别涉及一种用于智能打包坐便器的塑料袋打包机构。
背景技术
目前,市面上的智能坐便器皆为冲水式马桶方式。通过对机器增加传感器和电路控制,使其有别于传统坐便器,在水流量、温度,清洗等方面给用户更舒适和人性化的体验。但对于一些特殊人群和特定环境条件,如自驾游行,婴幼儿及行动不便的孕妇及老人方便等情况时,传统的固定式、冲刷式马桶使用存在很大的局限性。对于上诉的一些特定场合,市面上常见的方式是直接清洗排泄物的容器,或通过采用普通的垃圾袋,套在盛放排泄物的器容器上,进行打包,以省去清洗容器的麻烦。然而,不管是直接清洗还是套用塑料袋,整个过程都十分麻烦,且不卫生。
发明内容
为了解决上述技术问题,本发明中披露了一种用于智能打包坐便器的塑料袋打包机构,本发明的技术方案是这样实施的:
一种用于智能打包坐便器的塑料袋打包机构,包括坐便器本体、电机驱动组件和封口切割装置;其中,
所述坐便器本体包括底座、导向杆、压袋杆、软胶垫、同步带、第一带轮、第二带轮、第一连接轴、第二连接轴和第一齿轮;
所述底座安装于所述坐便器本体内,所述底座两边设有一对导向杆,所述压袋杆安装于所述导向杆上,所述压袋杆装有所述软胶垫,所述同步带设置于所述压袋杆两端,所述第一带轮通过所述第一连接轴连接固定,所述第二带轮通过所述第二连接轴连接固定,所述第一齿轮位于所述第一连接轴上,所述第一齿轮连接所述电机驱动组件;
优选地,所述坐便器本体还包括缓冲杆;
所述缓冲杆滑动安装于所述导向杆上,所述缓冲杆与所述封口切割装置通过弹簧连接,缓冲杆前部设置有卡环。
优选地,所述导向杆材质为不锈钢。
优选地,所述软胶垫为耐高温发泡硅胶材质。
优选地,所述电机驱动组件包括电机;所述电机为直流电机。
优选地,所述压袋杆上下侧两端具有三角形双翼。
优选地,所述压袋杆两侧上部设有紧定螺钉孔。
优选地,所述缓冲杆上下侧两端也设有双翼结构。
优选地,所述坐便器本体还包括第一传感器和第二传感器;
所述第一传感器设置于所述压袋杆的初始位置,所述第二传感器设置于所述压袋杆与所述封口切割装置贴合处。
实施本发明的技术方案可解决现有技术中智能坐便器不管是直接清洗还是套用塑料袋,整个过程都十分麻烦,且不卫生的技术问题;实施本发明的技术方案,可实现更加高效、便捷、卫生地处理排泄物的技术效果。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一种实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
其中相同的零部件用相同的附图标记表示。需要说明的是,下面描述中使用的词语“前”、“后”、“左”、“右”、“上”和“下”指的是附图中的方向,词语“底面”和“顶面”、“内”和“外”分别指的是朝向或远离特定部件几何中心的方向。
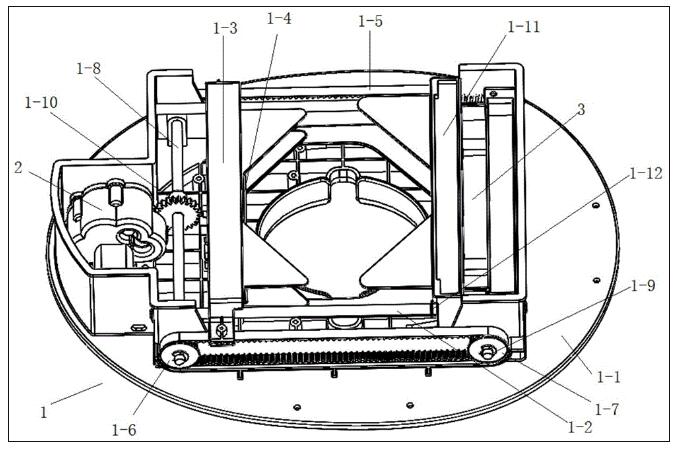
图1为坐便器本体结构示意图;
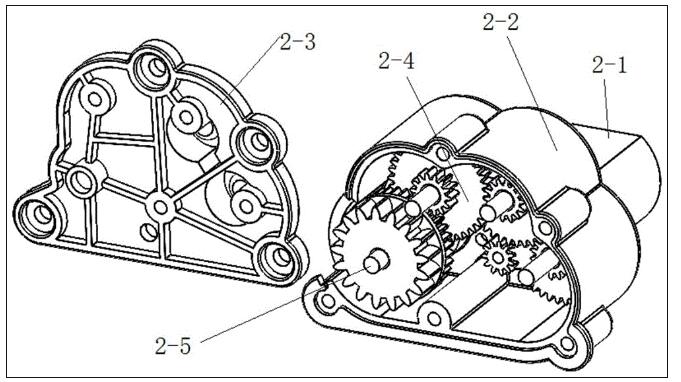
图2为电机驱动组件结构示意图;
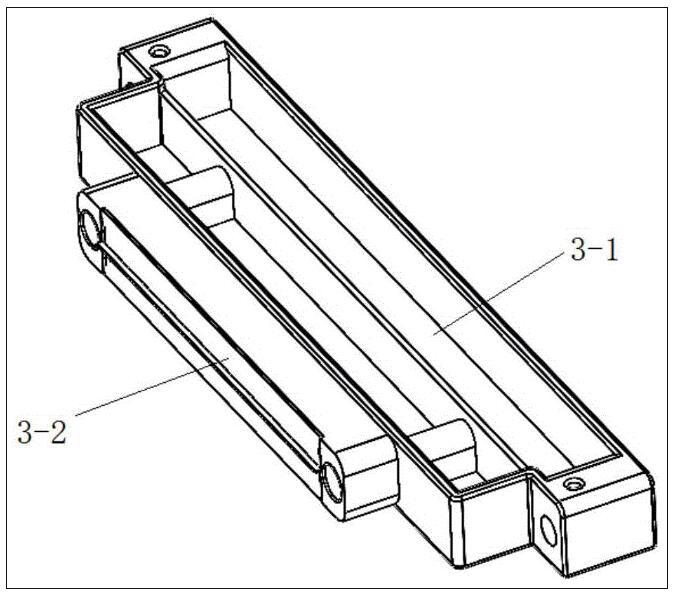
图3为封口切割装置结构示意图;
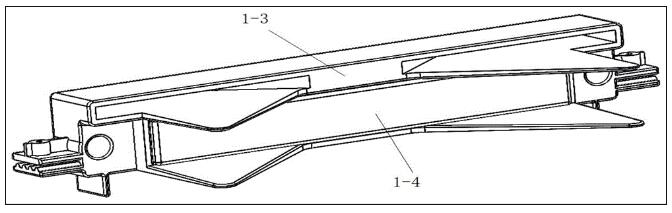
图4为实施例2的结构示意图;
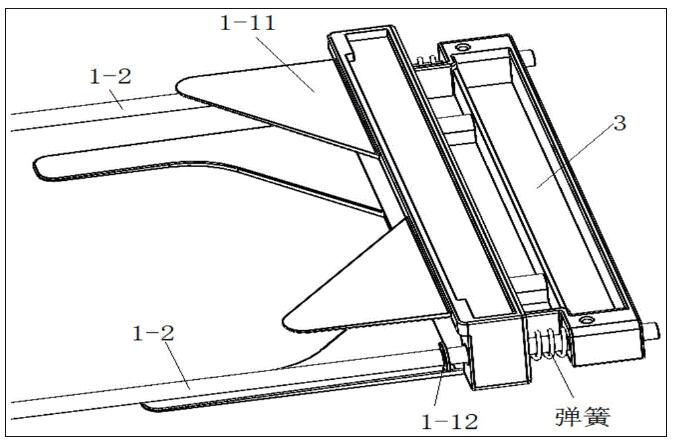
图5为实施例3的结构示意图;
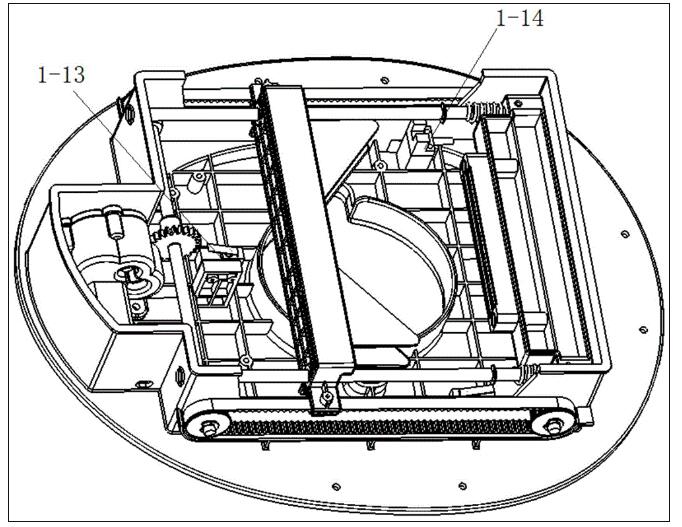
图6为实施例4的结构示意图。
在上述附图中,各图号标记分别表示:
1,坐便器本体
1-1,底座 1-2,导向杆 1-3,压袋杆 1-4,软胶垫 1-5,同步带 1-6,第一带轮 1-7,第二带轮 1-8,第一连接轴 1-9,第二连接轴 1-10,第一齿轮 1-11,缓冲杆 1-12,卡环 1-13,第一传感器 1-14,第二传感器
2,电机驱动机构
2-1,电机2-2,外壳2-3,上盖2-4,第二齿轮2-5,电机转轴
3,封口切割装置
3-1,固定座3-2,热熔封口切割模块
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例1
在一种具体的实施例中,如图1、图2和图3所示,一种用于智能打包坐便器的塑料袋打包机构,包括坐便器本体1、电机驱动组件2和封口切割装置3;其中,
坐便器本体包括底座1-1、导向杆1-2、压袋杆1-3、软胶垫1-4、同步带1-5、第一带轮1-6和第二带轮1-7、第一连接轴1-8、第二连接轴1-9、第一齿轮1-10;
底座1-1安装于坐便器本体1内,底座1-1两边设有一对导向杆1-2,压袋杆1-3安装于导向杆1-2上,压袋杆1-3装有软胶垫1-4,同步带1-5设置于压袋杆1-3两端,第一带轮1-6通过第一连接轴1-8连接固定,第二带轮1-7通过第二连接轴1-9连接固定,第一齿轮1-10位于第一连接轴1-8上,第一齿轮1-10连接电机驱动组件2;
电机驱动组件2包括电机2-1、外壳2-2、上盖2-3、第二齿轮2-4和电机转轴2-5;
电机2-1安装于外壳2-2上,上盖2-3与外壳2-2通过螺丝连接固定,第二齿轮2-4安装于电机转轴2-5上,电机转轴2-5一端连接电机2-1,另一端嵌套于上盖2-3,电机驱动组件2固定于底座1-1后部的侧壁上;
封口切割装置3包括固定座3-1和热熔封口切割模块3-2;
固定座3-1固定于底座1-1上,固定座3-1与导向轴2固定通过螺丝固定,热熔封口切割模块3-2固定于固定座3-1上。
底座1-1,安装在坐便器本体1内,用于固定和放置打包机构上的各组件。底座1-1两个相对的侧边设有一对平行的导向杆1-2。在导向杆1-2上滑动安装有一个压袋杆1-3,压袋杆1-3中间部位装有软胶垫1-4。压袋杆1-3的两端带有齿状缺口,与两侧的两根同步带1-5配合,同步带1-5由第一带轮1-6和第二带轮1-7配合带动。两个第一带轮1-6由一个横穿底座腔体的第一连接轴1-8连接在一起,两个第二带轮1-7由另一根横穿底座腔体的第二连接轴1-9连接在一起,第一连接轴1-8和第二连接轴1-9均为金属材料。第一连接轴1-8上固定有一个第一齿轮1-10,第一齿轮1-10与电机驱动组件11相连。当电机驱动组件2转动时,会带动第一齿轮1-10转动,因为第一齿轮1-10与第一连接轴1-8固定,第一连接轴1-8与第一带轮1-6固定,与同步带1-5配合,同步带1-5与压袋杆1-4两端相对固定,因此,压袋杆1-3会沿着导向杆1-2移动。调整电机2-1转向,可以控制压袋杆1-3正向和反向移动。
外壳2-2固定2-5电机转轴,电机转轴2-5上套有第二齿轮2-4,齿轮间相互啮合,实现输出转数和扭矩的变化,满足使用要求。最后一级与第一齿轮1-10啮合,实现动力传输。电机转轴2-5另一端嵌套在2-3上盖的凹槽内,上盖2-3与外壳2-2通过螺丝进行固定。
固定座3-1固定在底座1-1上,两侧设有螺丝孔,与导向杆1-2固定。热熔封口切割模块3-2固定在3-1固定座上,热熔封口模块3-2采用电加热方式。当进行塑料袋打包时,压袋杆1-3在电机2-1带动下移动,收拢塑料袋贴合封口切割装置3,封口切割装置3发热,热熔密封塑料袋,并切断塑料袋,完成打包。本实施例处理排泄物更加高效、便捷、卫生。
在一种优选的实施方式中,坐便器本体1还包括缓冲杆1-11;
缓冲杆1-11滑动安装于导向杆1-2上,缓冲杆1-11与封口切割装置2通过弹簧连接,缓冲杆前部设置有卡环1-12。
由于垃圾袋内盛放有排泄物,具有一定重量。在热熔打包时,由于密封口处于熔融状态,受到重力作用后可能产生拉扯变形,导致热封面的效果不理想。为此,在该实施例上还设有缓冲杆1-11,缓冲杆1-11前部由卡环1-12进行限位。进行塑料袋打包时,压袋杆1-3先接触缓冲杆1-11,挤压缓冲杆1-11向后移动一定距离后,再与热熔封口模块3-2贴合。此时由于弹簧力的作用,使压袋杆1-3和缓冲杆1-11始终夹紧塑料袋。以此,消除塑料袋中排泄物的重力对热熔过程中塑料袋的拉扯作用,达到更好的热熔塑封效果。
在一种优选的实施方式中,导向杆1-2材质为不锈钢。
不锈钢表面光滑、不易生锈,利于长期使用,且价格低廉。
在一种优选的实施方式中,软胶垫1-4为耐高温发泡硅胶材质。
高温发泡硅胶具有良好的回弹性及机械性强度产品绝缘环保无毒无臭味,柔韧性好。使用寿命长,耐压缩,耐酸碱抗老化,抗紫外线。耐高温不变形,非常适用于本实施例的工作环境。
在一种优选的实施方式中,电机驱动组件2包括电机2-1;电机2-1为直流电机。
在本实施例方式中,直流电机体积小,价格低,安装方便。
实施例2
在一种优选的实施例中,如图5所示,压袋杆1-3上下侧两端具有三角形双翼。
压袋杆1-3的上下侧两端具有三角形双翼,该双翼可以使压袋杆1-3在挤压塑料袋的过程中,将塑料袋沿斜面往中间聚合,达到更理想的聚合效果。
优选地,压袋杆1-3两侧上部设有紧定螺钉孔。
在压袋杆1-3两侧上部设有紧定螺钉孔,可以加紧配合压袋杆1-3和同步带1-5,防止打滑。
实施例3
在一种优选的实施例中,如图4所示,缓冲杆1-11上下侧两端也设有双翼结构。
缓冲杆1-11具有的双翼结构,与压袋杆1-3相辅相成,起到对塑料袋双向收拢的作用,达到更好的收拢效果。
实施例4
在一种优选的实施例中,如图6所示,坐便器本体还包括第一传感器1-13和第二传感器1-14;
第一传感器1-13设置于压袋杆1-3的初始位置,第二传感器1-14设置于压袋杆1-3与封口切割装置3贴合处。
本实施例是为了为了实现自动打包功能,保证每次打包位置的准确性已经打包质量。传感器可为微动开关、光电传感器或红外传感器等。在压袋杆1-3的初始位置设置传感器1-13,保证每次打包结束后,压袋杆1-3回到指定位置。在压袋杆1-3与封口切割装置3贴合的地方安装有传感器1-12,使得压袋杆1-3到达指定热封位置时,能够控制电机2-1停止转动,防止电机2-1堵转,损坏电机2-1。
实施本发明的技术方案可解决现有技术中智能坐便器不管是直接清洗还是套用塑料袋,整个过程都十分麻烦,且不卫生的技术问题;实施本发明的技术方案,可实现更加高效、便捷、卫生地处理排泄物的技术效果。
需要指出的是,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关链接:

Copyright © 宁波鄞州盖奇同步带轮有限公司 2007-2022 All Rights Reserved.
电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:浙江省宁波市鄞州区姜山镇蔡郎桥村姜南路39-2 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持 浙公网安备33021202003319号
电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:浙江省宁波市鄞州区姜山镇蔡郎桥村姜南路39-2 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持 浙公网安备33021202003319号