产品搜索
当前位置:首页->自动收放线机构
自动收放线机构
【申请公布号:CN111924670A;申请权利人:西安环海机器人科技有限公司;发明设计人: 王绍宁; 方军锋;】
摘要:
本发明涉及一种自动收放线机构,包括机箱,在机箱内设置线轮模组、排线器、制动器、电机和无线控制器;所述线轮模组的一端通过第二同步带与排线器连接,线轮模组的另一端通过第一同步带与电机连接,线轮模组的这一端同时和制动器连接。本发明采用电控的方式实现自动化的收放地线,节省的人力,避免了地线绕乱而使之报废,极大的提高了管道机器人质量检测工作的效率。
主权项:
1.自动收放线机构,其特征在于,包括机箱,在机箱内设置线轮模组(7)、排线器(2)、制动器(5)、电机(3)和无线控制器(6);所述线轮模组(7)的一端通过第二同步带(12)与排线器(2)连接,线轮模组(7)的另一端通过第一同步带(4)与电机(3)连接,线轮模组(7)与第一同步带(4)连接的一端同时和制动器(6)连接。
要求:
1.自动收放线机构,其特征在于,包括机箱,在机箱内设置线轮模组(7)、排线器(2)、制动器(5)、电机(3)和无线控制器(6);所述线轮模组(7)的一端通过第二同步带(12)与排线器(2)连接,线轮模组(7)的另一端通过第一同步带(4)与电机(3)连接,线轮模组(7)与第一同步带(4)连接的一端同时和制动器(6)连接。
2.根据权利要求1所述自动收放线机构,其特征在于,所述机箱包括箱盖、箱体(1)、底板、把手、合页、锁扣和机脚,所述箱盖与箱体(1)通过合页连接,并通过锁扣锁紧,箱体(1)与底板通过螺栓固定,把手安装在箱盖上,机脚设置四个,设置在底板四角;所述箱体(1)上设置电源开关(8)、电源接口(9)、电量计(10)和接地插口(11)。
3.根据权利要求2所述自动收放线机构,其特征在于,所述线轮模组7包括轮侧板(701)、轮基轴(702)、轮基座(703)、导电板(704)、轴承(706)、轴承座(705)、固定座(709)、传动轴(707)、同步轮(708)和接触器(710);所述轮侧板(701)共两片,两片轮侧板(701)之间设置轮基轴(702)和轮基座(703),轮侧板(701)、轮基轴(702)、轮基座(703)通过丝杆锁紧固定在传动轴(707)上,所述传动轴(707)通过其两端的各一对轴承(706)和轴承座(705)安装在固定座(709)上,所述同步轮(708)共两个,分别设置在传动轴(707)的两端,所述导电板(704)设置在一侧的轮侧板(701)外,导电板(704)与轮基轴(703)上缠绕的地线接通,所述接触器(710)设置在固定座(709)上,其一端与导电板(704)接通,另一端通过导线连接接地插口(11)。
4.根据权利要求3所述自动收放线机构,其特征在于,所述制动器(5)包括固定座(501)、石棉环(502)、摩擦轴(503)、单向轴承(504)、平键(505)、挡圈(506)、弹簧(507)和螺栓(508);所述固定座(501)共两个,通过弹簧(507)和螺栓(508)安装在一起,所述石棉环(502)设置在固定座(501)内侧,所述摩擦轴(503)设置在石棉环(502)内侧,所述单向轴承(504)安装在摩擦轴(503)内通过平键(505)和挡圈(506)固定,单向轴承(504)与线轮模组(7)的传动轴(707)一端通过平键(505)连接。
自动收放线机构
技术领域
本发明属于管道机器技术领域,尤其涉及一种自动收放线机构。
背景技术
随着现代工业发展,在石油、天然气等输送管道铺设工程中,越来越多的使用管道机器人进行管道焊口处的内涂层涂覆和涂层质量检测等作业,而当管道机器人进入管道进行涂层质量检测时,由于整个管道内壁都已涂覆了涂层,这就需要通过一根地线将机器人上的电火花检漏仪与管口处无涂层的管道基体进行连接导通,才可以进行涂层的漏点检测作业。通常的,在机器人进行质量检测作业时,这根地线被拖拽着进入管道,而当机器人作业结束返回管口时,需要人力摇动收线盘,将地线拖出收回。这种收放线的方式不仅耗时耗力,而且容易将地线收乱,造成地线交织在一起,严重时造成整盘地线报废;此外在机器人进入管道时,由于线盘是自由放线状态,当机器人停止行走时线盘在惯性作用下会转动,造成线盘上的地线松散而错乱交织,从而无法继续放线,耽误工时。
发明内容
本发明是提供一种自动收放线机构,解决现有技术中存在的上述问题。
为了达到上述目的,本发明所采用的技术方案为:
自动收放线机构,包括机箱,在机箱内设置线轮模组、排线器、制动器、电机和无线控制器;所述线轮模组的一端通过第二同步带与排线器连接,线轮模组的另一端通过第一同步带与电机连接,线轮模组的这一端同时和制动器连接。
进一步的,所述机箱包括箱盖、箱体、底板、把手、合页、锁扣和机脚,所述箱盖与箱体通过合页连接,并通过锁扣锁紧,箱体1与底板通过螺栓固定,把手安装在箱盖上,机脚设置四个,设置在底板四角;所述箱体1上设置电源开关、电源接口、电量计和接地插口。
进一步的,所述线轮模组包括轮侧板、轮基轴、轮基座、导电板、轴承、轴承座、固定座、传动轴、同步轮和接触器;所述轮侧板共两片,两片轮侧板之间设置轮基轴和轮基座,轮侧板、轮基轴、轮基座通过丝杆锁紧固定在传动轴上,所述传动轴通过其两端的各一对轴承和轴承座安装在固定座上,所述同步轮共两个,分别设置在传动轴的两端,所述导电板设置在一侧的轮侧板外,导电板与轮基轴上缠绕的地线接通,所述接触器设置在固定座上,其一端与导电板接通,另一端通过导线连接接地插口。
进一步的,所述制动器包括固定座、石棉环、摩擦轴、单向轴承、平键、挡圈、弹簧和螺栓;所述固定座共两个,通过弹簧和螺栓安装在一起,所述石棉环设置在固定座内侧,所述摩擦轴设置在石棉环内侧,所述单向轴承安装在摩擦轴内通过平键和挡圈固定,单向轴承与线轮模组的传动轴一端通过平键连接。
与现有技术相比,本发明的有益效果如下:
本发明采用电控的方式实现自动化的收放地线,节省的人力,避免了地线绕乱而使之报废,极大的提高了管道机器人质量检测工作的效率。
本发明的在收线时,通过操作人员的无线遥控器控制无线控制器,使电机转动,通过第一同步带带动线轮模组反向转动,并通过第二同步带带动排线器进行往复排线,使得地线整齐的缠绕在线轮模组上。
附图说明
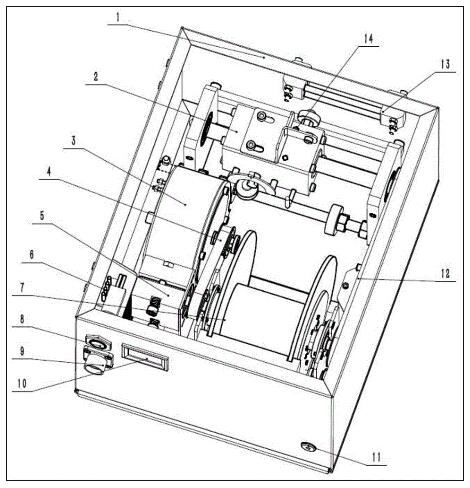
图1是本发明在打开箱盖后的整体结构示意图;
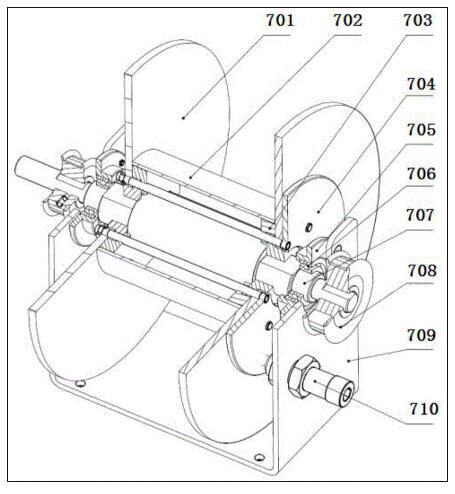
图2是本发明线轮模组示的结构示意图;
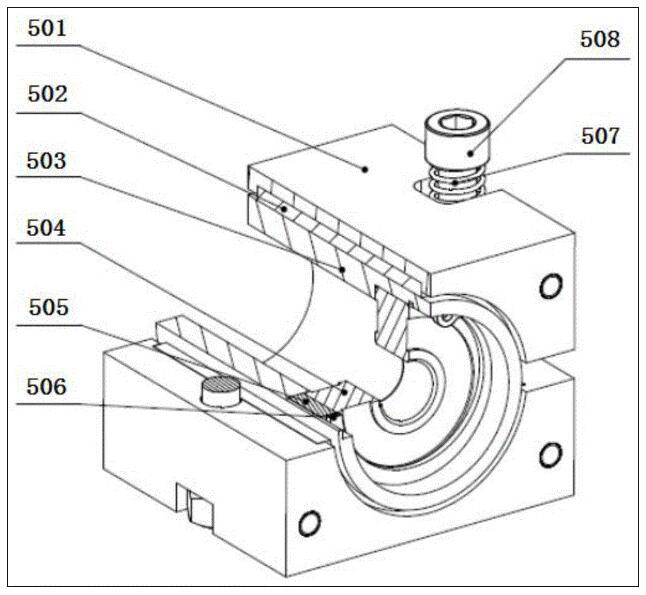
图3是本发明制动器的结构示意图。
图中,1-箱体,2-排线器,3-电机,4-1#同步带,5-制动器,6-无线控制器,7-线轮模组,8-电源开关,9-电源接口,10-电量计,11-接地插口,12-2#同步带,13-过线绝缘座,14-过线支架;
701-侧板,702-轮基轴,703-轮基座,704-导电板,705-轴承座,706-轴承,707-传动轴,708-同步轮,709-固定座,710-接触器;
501-固定座,502-石棉环,503-摩擦轴,504-单向轴承,505-平键,506-挡圈,507-弹簧,508-螺栓。
具体实施方式
为了使本发明的目的、技术方案和优点更加清楚,下面将结合实施例对本发明作进一步地详细描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
参见图1所述的自动收放线机构,包括机箱,在机箱内设置线轮模组7、排线器2、制动器5、电机3和无线控制器6;线轮模组7的一端通过第二同步带12与排线器2连接,线轮模组7的另一端通过第一同步带4与电机3连接,线轮模组7与第一同步带4连接的一端同时和制动器6连接。
机箱包括箱盖、箱体1、底板、把手、合页、锁扣和机脚,箱盖与箱体1通过合页连接,并通过锁扣锁紧,箱体1与底板通过螺栓固定,把手安装在箱盖上,机脚设置四个,设置在底板四角;箱体1上设置电源开关8、电源接口9、电量计10和接地插口11;在箱体1设置排线器2的一端设置过线支架14,在排线器2上设置过线绝缘座13。
参见图2,线轮模组7包括轮侧板701、轮基轴702、轮基座703、导电板704、轴承706、轴承座705、固定座709、传动轴707、同步轮708和接触器710;轮侧板701共两片,两片轮侧板701之间设置轮基轴702和轮基座703,轮侧板701、轮基轴702、轮基座703通过丝杆锁紧固定在传动轴707上,传动轴707通过其两端的各一对轴承706和轴承座705安装在固定座709上,同步轮708共两个,分别设置在传动轴707的两端,导电板704设置在一侧的轮侧板701外,导电板704与轮基轴703上缠绕的地线接通,接触器710设置在固定座709上,其一端与导电板704接通,另一端通过导线连接接地插口11。
参见图3,制动器5包括固定座501、石棉环502、摩擦轴503、单向轴承504、平键505、挡圈506、弹簧507和螺栓508;固定座501共两个,通过弹簧507和螺栓508安装在一起,石棉环502设置在固定座501内侧,摩擦轴503设置在石棉环502内侧,单向轴承504安装在摩擦轴503内通过平键505和挡圈506固定,单向轴承504与线轮模组7的传动轴707一端通过平键505连接。
本发明的管道机器人进行质量检测作业时,将地线与管道机器人的地线连接器固定接通,并通过导线将管道基体与接地插口11连接,在电源接口9接上电源,按下电源开关8,使无线控制器6与操作人员的无线遥控器配对连接。放线时,管道机器人进入管道通过拖拽地线使线轮模组7转动,此时,线轮模组7中传动轴707通过制动器5的单向轴承504连接作用一起转动,并带动摩擦轴503转动,此时摩擦轴503与石棉环502进行摩擦作用,从而抵消了线轮模组7转动的惯性,避免了地线绕乱的现象。在收线时,通过无线遥控器控制无线控制器6,使电机3转动,通过第一同步带4带动线轮模组7反向转动,并通过第二同步带12带动排线器2进行往复排线,此时地线便被整齐的缠绕在线轮模组7上。
以上应用了具体个例对本发明进行阐述,只是用于帮助理解本发明,并不用以限制本发明。任何熟悉该技术的人在本发明所揭露的技术范围内的局部修改或替换,都应涵盖在本发明的包含范围之内。

Copyright © 宁波鄞州盖奇同步带轮有限公司 2007-2022 All Rights Reserved.
电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:浙江省宁波市鄞州区姜山镇蔡郎桥村姜南路39-2 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持 浙公网安备33021202003319号
电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:浙江省宁波市鄞州区姜山镇蔡郎桥村姜南路39-2 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持 浙公网安备33021202003319号