产品搜索
当前位置:首页->一种末端牵引上肢康复训练装置
一种末端牵引上肢康复训练装置
摘要:
本发明公开一种末端牵引上肢康复训练装置,在康复训练中将患者的上肢前臂和手固定在机器人的臂托和手柄上,机器人手臂驱动人体上肢末端从而带动上肢在人体水平面和矢状面内完成各种康复训练模式。本装置驱动共有两个电机和一个单作用气缸,第一关节电机驱动大臂相对于立柱摆动,第二关节电机通过同步带Ⅱ传动驱动小臂相对于大臂摆动,单作用气缸驱动机器人末端做垂直直线运动。采用伺服闭环控制系统精确控制人体上肢的姿态、活动范围和训练强度。控制器由触摸屏和开关按钮组成,通过触摸屏可选择康复训练模式,各康复模式训练都有对应的动态示意图显示,方便易懂,还可根据病人的情况,调节各康复训练模式的速度、时间及各关节的活动范围。
主权项:
1.一种末端牵引上肢康复训练装置,其特征在于:包括机器人本体、机器人支撑机构和控制驱动单元,所述机器人本体包括大臂(1)、与大臂一端连接的小臂(2)和末端组件构成的三个自由度,所述机器人支撑机构包括用于支撑机器人本体的支撑立柱(3);所述支撑立柱(3)为矩形框架结构,所述支撑立柱(3)的顶部设置有第一安装板(301),在第一安装板(301)的下方依次水平设置有第二安装板(302)以及第三安装板(303);所述大臂(1)一端的底部通过大臂减速器(24)水平设置在第一安装板(301)上,所述大臂减速器(24)贯穿于第一安装板(301)设置,在第一安装板(301)与第三安装板(303)之间设置有驱动大臂转动的驱动传动机构Ⅰ,所述驱动传动机构Ⅰ包括第一关节电机(5),所述第一关节电机(5)的一端竖直设置在第二安装板(302)以及第三安装板(303)之间,且第一关节电机(5)穿过第二安装板(302)的另一端设置的主动带轮Ⅰ(21)通过水平设置的同步带Ⅰ(6)与大臂减速器输入端设置的从动带轮Ⅰ(22)连接,从而通过第一关节电机(5)控制大臂(1)相对于支撑立柱摆动;在大臂(1)位于大臂减速器的一端内腔固定设置有电机法兰(23),在电机法兰(23)上竖直设置有控制小臂转动的驱动传动机构Ⅱ,所述驱动传动机构Ⅱ包括第二关节电机(4),所述第二关节电机(4)的输出轴连接有位于电机法兰内腔的主动带轮Ⅱ(15),位于大臂内腔的另一端设置有从动带轮Ⅱ(16),所述主动带轮Ⅱ(15)与从动带轮Ⅱ(16)之间设置有同步带Ⅱ(18),所述从动带轮Ⅱ(16)连接有小臂减速器(17),所述小臂减速器(17)的输出端与小臂连接,使得第二关节电机(4)控制小臂(2)相对于大臂(1)摆动,所述小臂(2)的另一端连接有末端组件;所述末端组件包括竖直设置的单作用气缸(7),所述单作用气缸(7)的底部设置有位于小臂内腔的三维力传感器(25),在单作用气缸(7)的顶部设有水平设置的手托(10)以及臂托(12),所述手托的一端设置有手柄(11),所述手托的另一端通过连接肘头(9)与单作用气缸(7)顶部连接的单肘头(8)转动连接,所述臂托(12)与连接肘头(9)顶部的一侧固定连接;所述控制驱动单元包括控制器以及电机驱动器(20),所述电机驱动器(20)设置在第三安装板(303)的端面上。
要求:
1.一种末端牵引上肢康复训练装置,其特征在于:包括机器人本体、机器人支撑机构和控制驱动单元,所述机器人本体包括大臂(1)、与大臂一端连接的小臂(2)和末端组件构成的三个自由度,所述机器人支撑机构包括用于支撑机器人本体的支撑立柱(3);
所述支撑立柱(3)为矩形框架结构,所述支撑立柱(3)的顶部设置有第一安装板(301),在第一安装板(301)的下方依次水平设置有第二安装板(302)以及第三安装板(303);
所述大臂(1)一端的底部通过大臂减速器(24)水平设置在第一安装板(301)上,所述大臂减速器(24)贯穿于第一安装板(301)设置,在第一安装板(301)与第三安装板(303)之间设置有驱动大臂转动的驱动传动机构Ⅰ,所述驱动传动机构Ⅰ包括第一关节电机(5),所述第一关节电机(5)的一端竖直设置在第二安装板(302)以及第三安装板(303)之间,且第一关节电机(5)穿过第二安装板(302)的另一端设置的主动带轮Ⅰ(21)通过水平设置的同步带Ⅰ(6)与大臂减速器输入端设置的从动带轮Ⅰ(22)连接,从而通过第一关节电机(5)控制大臂(1)相对于支撑立柱摆动;
在大臂(1)位于大臂减速器的一端内腔固定设置有电机法兰(23),在电机法兰(23)上竖直设置有控制小臂转动的驱动传动机构Ⅱ,所述驱动传动机构Ⅱ包括第二关节电机(4),所述第二关节电机(4)的输出轴连接有位于电机法兰内腔的主动带轮Ⅱ(15),位于大臂内腔的另一端设置有从动带轮Ⅱ(16),所述主动带轮Ⅱ(15)与从动带轮Ⅱ(16)之间设置有同步带Ⅱ(18),所述从动带轮Ⅱ(16)连接有小臂减速器(17),所述小臂减速器(17)的输出端与小臂连接,使得第二关节电机(4)控制小臂(2)相对于大臂(1)摆动,所述小臂(2)的另一端连接有末端组件;
所述末端组件包括竖直设置的单作用气缸(7),所述单作用气缸(7)的底部设置有位于小臂内腔的三维力传感器(25),在单作用气缸(7)的顶部设有水平设置的手托(10)以及臂托(12),所述手托的一端设置有手柄(11),所述手托的另一端通过连接肘头(9)与单作用气缸(7)顶部连接的单肘头(8)转动连接,所述臂托(12)与连接肘头(9)顶部的一侧固定连接;
所述控制驱动单元包括控制器以及电机驱动器(20),所述电机驱动器(20)设置在第三安装板(303)的端面上。
2.根据权利要求1所述的一种末端牵引上肢康复训练装置,其特征在于:在第一安装板(301)与第二安装板(302)之间的一侧固定设置有侧板(13),在第二安装板(302)靠近侧板的一端端面上通过螺栓连接有移动板(14),所述第一关节电机(5)通过螺钉与移动板(14)固定连接,所述移动板(14)为L型,所述移动板(14)的竖直段与侧板(13)通过螺栓柱连接,通过拉动螺栓柱调整移动板(14)与侧板(13)的距离从而调整第一关节电机(5)的移动,从而调整同步带Ⅰ(6)的张紧。
3.根据权利要求2所述的一种末端牵引上肢康复训练装置,其特征在于:移动板(14)水平段上与第二安装板(302)的连接孔为长椭圆孔,使得移动板(14)带着第一关节电机(5)相对于第二安装板(302)移动。
4.根据权利要求1所述的一种末端牵引上肢康复训练装置,其特征在于:位于主动带轮Ⅱ(15)以及从动带轮Ⅱ(16)之间的同步带Ⅱ内设置有张紧轮(19),通过调节张紧轮(19)的位置调节同步带Ⅱ(18)的张紧。
5.根据权利要求1所述的一种末端牵引上肢康复训练装置,其特征在于:所述连接肘头(9)和单肘头(8)之间通过螺栓连接,通过螺栓连接的松紧可以调整相对转动的摩擦力。
6.根据权利要求1所述的一种末端牵引上肢康复训练装置,其特征在于:所述连接肘头(9)的顶部设置有设置有轴孔,所述手托(10)远离手柄的一端与连接肘头(9)的轴孔配合组成,且通过轴端螺钉连接固定,使得腕关节的转动阻力通过轴端螺钉压紧程度调节。
7.根据权利要求1所述的一种末端牵引上肢康复训练装置,其特征在于:所述第一关节电机(5)以及第二关节电机(4)均设置有光电编码器检测机构。
8.根据权利要求1所述的一种末端牵引上肢康复训练装置,其特征在于:所述大臂减速器(24)以及小臂减速器(17)均采用谐波减速器。
9.根据权利要求1所述的一种末端牵引上肢康复训练装置,其特征在于:所述大臂减速器(24)的旋转中心以及第二关节电机的旋转中心均与支撑立柱(3)的中心轴线重合。
10.根据权利要求1所述的一种末端牵引上肢康复训练装置,其特征在于:所述电机法兰(23)侧面设置有便于安装同步带Ⅱ的开口。
一种末端牵引上肢康复训练装置
技术领域
本发明涉及医疗保健器械技术领域,具体的说是一种末端牵引上肢康复训练装置。
背景技术
末端牵引上肢康复训练是上肢康复的一种方式,非常适用于上肢脑神经损伤、肌肉损伤导致上肢运动能力丧失患者的康复训练,如脑中风偏瘫患者,他们多数身体一侧肢体会部分或全部丧失运动能力,常年由于缺乏运动或有效科学的康复活动,导致肢体出现不同程度肌肉萎缩和关节粘连,长期缺乏积极有效的运动训练极易造成上肢失去活动能力。上肢康复训练装置可以在此类病人坐姿下,使上肢得到充分的活动从而达到康复训练的目的。
目前市场常用的上肢康复装置大多是类似于CPM机的康复形式,结构简单,但训练模式固定,只能进行关节的被动训练。或者是采用6自由度的外骨骼杆件,将人体上肢与末端牵引捆绑在一起,让上肢关节跟随外骨骼的关节运动而运动。6自由度的外骨骼机器人和不同患者的上肢契合调节不方便,结构复杂,另外采用包裹方式对上肢进行固定,一旦机器人出现故障,或者患者肌肉痉挛的情况容易对患者造成伤害。另外市场上还有2自由度直角坐标的末端牵引康复机器人,仅能实现上肢在水平面内的运动,存在着对人体上肢关节训练不全面、模式单一、上肢韧带不能得到全方位拉伸运动、训练效果有限等问题。
发明内容
本发明为解决上述问题,提供了一种末端牵引上肢康复训练装置,本装置大臂和小臂各有一个自由度,分别由第一关节电机和第二关节电机驱动,末端组件的升降由单作用气缸驱动,本装置训练空间宽广、训练模式多样、训练参数调整方便,各种运动模式是根据运动康复理疗技术而设计的,有肩关节在水平面内的内收、外展模式以及在矢状面内的屈伸,肘关节在水平面内的屈伸模式,各关节活动范围可根据需要而调节,以适应不同患者的康复训练需求。
本发明通过以下技术方案来实现:
一种末端牵引上肢康复训练装置,包括机器人本体、机器人支撑机构和控制驱动单元,所述机器人本体包括大臂、与大臂一端连接的小臂和末端组件构成的三个自由度,所述机器人支撑机构包括用于支撑机器人本体的支撑立柱;
所述支撑立柱为矩形框架结构,所述支撑立柱的顶部设置有第一安装板,在第一安装板的下方依次水平设置有第二安装板以及第三安装板;
所述大臂一端的底部通过大臂减速器水平设置在第一安装板上,所述大臂减速器贯穿于第一安装板设置,在第一安装板与第三安装板之间设置有驱动大臂转动的驱动传动机构Ⅰ,所述驱动传动机构Ⅰ包括第一关节电机,所述第一关节电机的一端竖直设置在第二安装板以及第三安装板之间,且第一关节电机穿过第二安装板的另一端设置的主动同步带轮Ⅰ通过水平设置的同步带Ⅰ与大臂减速器输入端设置的从动带轮Ⅰ连接,从而通过第一关节电机控制大臂相对于支撑立柱摆动;
在大臂位于大臂减速器的一端内腔固定设置有电机法兰,在电机法兰上竖直设置有控制小臂转动的驱动传动机构Ⅱ,所述驱动传动机构Ⅱ包括第二关节电机,所述第二关节电机的输出轴连接有位于电机法兰内腔的主动带轮Ⅱ,位于大臂内腔的另一端设置有从动带轮Ⅱ,所述主动带轮Ⅱ与从动带轮Ⅱ之间设置有同步带Ⅱ,所述从动带轮Ⅱ连接有小臂减速器,所述小臂减速器的输出端与小臂连接,使得第二关节电机控制小臂相对于大臂摆动,所述小臂的另一端连接有末端组件;
所述末端组件包括竖直设置的单作用气缸,所述单作用气缸的底部设置有位于小臂内腔的三维力传感器,在单作用气缸的顶部设有水平设置的手托以及臂托,所述手托的一端设置有手柄,所述手托的另一端通过连接肘头与单作用气缸顶部连接的单肘头转动连接,所述臂托与连接肘头顶部的一侧固定连接;
所述控制驱动单元包括控制器以及电机驱动器,所述电机驱动器设置在第三安装板的端面上。
进一步的,在第一安装板与第二安装板之间的一侧固定设置有侧板,在第二安装板靠近侧板的一端端面上通过螺栓连接有移动板,所述第一关节电机通过螺钉与移动板固定连接,所述移动板为L型,所述移动板的竖直段与侧板通过螺栓柱连接,通过拉动螺栓柱调整移动板与侧板的距离从而调整第一关节电机的移动,从而调整同步带Ⅰ的张紧。
进一步的,移动板水平段上与第二安装板的连接孔为长椭圆孔,使得移动板带着第一关节电机相对于第二安装板移动。
进一步的,位于主动带轮Ⅱ以及从动带轮Ⅱ之间的同步带Ⅱ内设置有张紧轮,通过调节张紧轮的位置调节同步带Ⅱ的张紧。
进一步的,所述连接肘头和单肘头之间通过螺栓连接,通过螺栓连接的松紧可以调整相对转动的摩擦力。
进一步的,所述连接肘头的顶部设置有设置有轴孔,所述手托远离手柄的一端与连接肘头的轴孔配合组成,且通过轴端螺钉连接固定,使得腕关节的转动阻力通过轴端螺钉压紧程度调节。
进一步的,所述第一关节电机以及第二关节电机均设置有光电编码器检测机构。
进一步的,所述大臂减速器以及小臂减速器均采用谐波减速器。
进一步的,所述大臂减速器的旋转中心以及第二关节电机的旋转中心均与支撑立柱的中心轴线重合。
进一步的,所述电机法兰侧面设置有便于安装同步带Ⅱ的开口。
本发明的有益效果在于:
(1)本发明可以根据病人的具体情况选择相应的康复模式,各康复模式训练都有对应的动态示意图显示,方便易懂,还可以根据病人的情况,调节各康复训练模式的速度、时间及各关节的活动范围,各电机都设有过载安全保护,一旦出现意外,机器人会及时停止工作,以防伤到病人;
(2)本发明利用第一关节电机、第二关节电机和单作用气缸的协调动作来驱动人体上肢完成多模式的空间立体康复训练运动,同时根据三维力传感器以及光电编码器检测机构分别对应实时采集机器人末端的力信号和和各旋转关节的角度信号达到对上肢精确的控制,利用单作用气缸作为末端垂直移动的驱动元件又具有一定的柔顺性和安全性,在不伤害病人的前提上获得良好的康复训练效果;
(3)本发明中第一关节电机和第二关节电机均集中布置在支撑立柱上,从而在一定程度上减轻机械臂上所受电机的重力,减低惯性力对机械系统产生的影响,提高了机械系统的控制性能。
附图说明
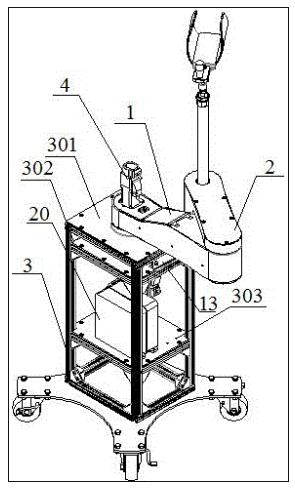
图1是本发明的整体结构示意图;
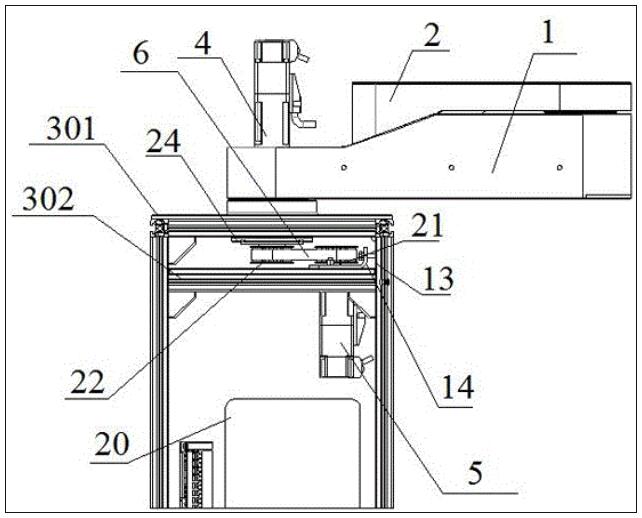
图2是本发明的驱动传动机构Ⅰ的结构示意图;
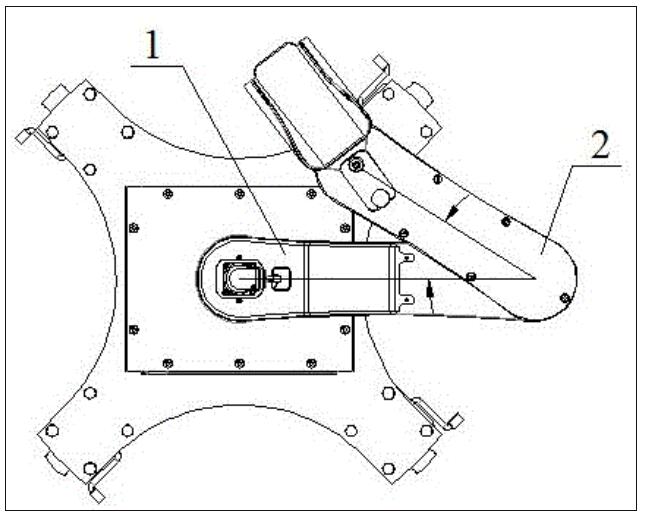
图3是本发明的俯视图;
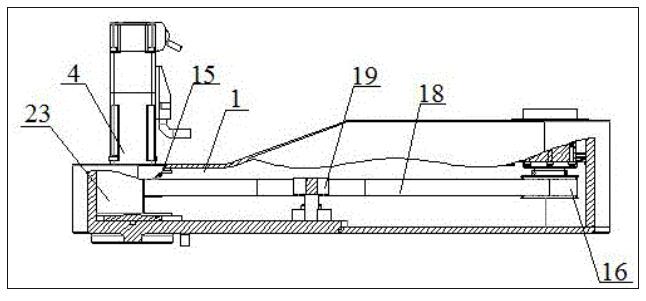
图4是本发明的驱动传动机构Ⅱ的结构示意图;
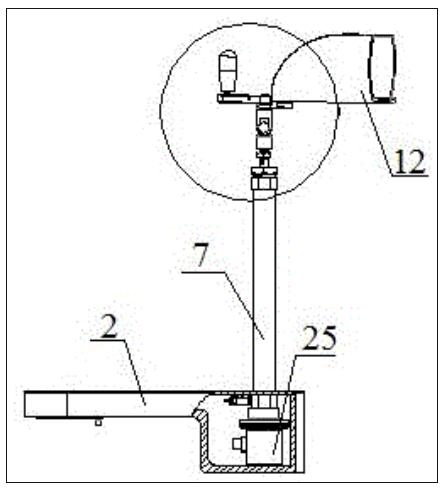
图5是本发明的末端组件的整体结构示意图;
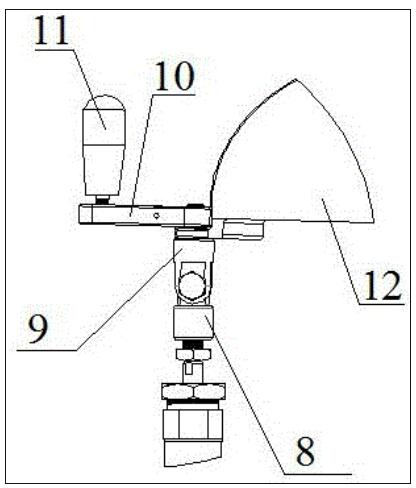
图6是本发明的末端组件顶部的局部图;
附图标记:1、大臂,2、小臂,3、支撑立柱,301、第一安装板,302、第二安装板,303、第三安装板,4、第二关节电机,5、第一关节电机,6、同步带Ⅰ,7、单作用气缸,8、单肘头,9、连接肘头,10、手托,11、手柄,12、臂托,13、侧板,14、移动板,15、主动带轮Ⅱ,16、从动带轮Ⅱ,17、小臂减速器,18、同步带Ⅱ,19、张紧轮,20、电机驱动器,21、主动带轮Ⅰ,22、从动同步带轮Ⅰ,23、电机法兰,24、大臂减速器,25、三维力传感器。
具体实施方式
下面根据附图对本发明实施例中的技术方案进行清楚、完整地描述。
实施例1
如附图所示,一种末端牵引上肢康复训练装置,包括机器人本体、机器人支撑机构和控制驱动单元,所述机器人本体包括大臂1、与大臂一端连接的小臂2和末端组件构成的三个自由度,所述机器人支撑机构包括用于支撑机器人本体的支撑立柱3,所述支撑立柱3的底部设置有底盘,所述底盘的四周设置有滑动轮,使其便于移动,省时省力;
所述支撑立柱3为矩形框架结构,所述支撑立柱3的顶部设置有第一安装板301,在第一安装板301的下方依次水平设置有第二安装板302以及第三安装板303;
所述大臂1一端的底部通过大臂减速器24水平设置在第一安装板301上,所述大臂减速器24贯穿于第一安装板301设置,在第一安装板301与第三安装板303之间设置有驱动大臂转动的驱动传动机构Ⅰ,所述驱动传动机构Ⅰ包括第一关节电机5,所述第一关节电机5的一端竖直设置在第二安装板302以及第三安装板303之间,且第一关节电机5穿过第二安装板302的另一端设置的主动带轮Ⅰ21通过水平设置的同步带Ⅰ6与大臂减速器输入端设置的从动带轮Ⅰ22连接,从而通过第一关节电机5控制大臂1相对于支撑立柱摆动;其中所述大臂减速器24采用谐波减速器,其通过螺钉固定在第一安装板301上,其输入端通过从动带轮Ⅰ22和同步带Ⅰ与主动带轮Ⅰ21连接,其输出端即柔轮通过螺钉连接大臂;
在第一安装板301与第二安装板302之间的一侧固定设置有侧板13,在第二安装板302靠近侧板的一端端面上通过螺栓连接有移动板14,所述第一关节电机5通过螺钉与移动板14固定连接,所述移动板14为L型,所述移动板14的竖直段与侧板13通过螺栓柱连接,通过拉动螺栓柱调整移动板14与侧板13的距离从而调整第一关节电机5的移动,从而调整同步带Ⅰ6的张紧,移动板14水平段上与第二安装板302的连接孔为长椭圆孔,使得移动板14带着第一关节电机5相对于第二安装板302移动。
在大臂1位于大臂减速器的一端内腔固定设置有电机法兰23,在电机法兰23上竖直设置有控制小臂转动的驱动传动机构Ⅱ,所述驱动传动机构Ⅱ包括第二关节电机4,所述第二关节电机4的输出轴连接有位于电机法兰内腔的主动带轮Ⅱ15,位于大臂内腔的另一端设置有从动带轮Ⅱ16,所述主动带轮Ⅱ15与从动带轮Ⅱ16之间设置有同步带Ⅱ18,所述电机法兰23侧面设置有便于安装同步带Ⅱ的开口,位于主动带轮Ⅱ15以及从动带轮Ⅱ16之间的同步带Ⅱ内设置有张紧轮19,通过调节张紧轮19的位置调节同步带Ⅱ18的张紧,所述从动带轮Ⅱ16连接有小臂减速器17,所述小臂减速器17的输出端与小臂连接,即小臂与大臂连接一端位于大臂上方设置,使得第二关节电机4控制小臂2相对于大臂1摆动,所述第一关节电机5以及第二关节电机4均设置有光电编码器检测机构,用于检测各关节的运动角度和速度,且各个电机都设有过载安全保护,一旦出现意外,机器人会及时停止工作,以防伤到病人。另外在机器人臂上设置有机械限位装置,做到进一步的保护;
所述大臂减速器24的旋转中心以及第二关节电机4的旋转中心均与支撑立柱3的中心轴线重合,所述小臂减速器17为谐波减速器,即其刚轮固定在大臂上,其柔轮输出连接小臂,所述小臂2的另一端连接有末端组件;
所述末端组件包括竖直设置的单作用气缸7,所述单作用气缸7的底部设置有位于小臂内腔的三维力传感器25,在单作用气缸7的顶部设有水平设置的手托10以及臂托12,所述手托的一端设置有手柄11,所述手托的另一端通过连接肘头9与单作用气缸7顶部连接的单肘头8转动连接,所述臂托12与连接肘头9顶部的一侧固定连接;
末端的作用力通过单作用气缸7传给三维力传感器25,人体手部在末端的作用力大小和方向通过三维力传感器25测量的压力值和方向表达,从而反映出训练者的主动运动意图,可用于基于阻抗控制的主动康复训练,单作用气缸7依靠气体压力将气缸活塞杆推出,依靠内部弹簧将气缸活塞杆压回,通过比例调压阀控制进气压力大小,平衡弹簧力和外负载,实现对气缸活塞杆伸出位移的控制,腕关节是手托10相对于连接肘头9的转动,在机器人带动人体上肢做康复运动时腕关节可以实现一定强度的被动康复。
进一步的,所述连接肘头9和单肘头8之间通过螺栓连接,通过螺栓连接的松紧可以调整相对转动的摩擦力,既能实现腕关节尺偏和桡偏动作在上肢康复训练过程中一定程度的被动训练,又能实现末端在上下移动时腕关节受力过大时的顺应性转动。
进一步的,所述连接肘头9的顶部设置有设置有轴孔,所述手托10远离手柄的一端与连接肘头9的轴孔配合组成,且通过轴端螺钉连接固定,使得腕关节的转动阻力通过轴端螺钉压紧程度调节,既能实现腕关节掌屈和背伸动作在上肢康复训练过程中一定程度的被动训练,又能实现腕关节受力过大时的顺应性转动。
进一步的,所述控制驱动单元包括计算机、仿真机、控制器、运动控制机构和电机驱动器20等部件,是康复训练装置的控制核心,还包括控制界面,所述控制界面包括触摸屏和开关按钮,通过触摸屏选择康复训练模式,可以根据患者的具体情况,选择不同的康复训练模式以及康复动作的幅度、速度和强度。康复训练参数实时反馈到控制界面的控制面板上,方便医生了解患者的康复情况,所述电机驱动器20设置在第三安装板303的端面上。
工作过程:使用时,开启机器人使其处于初始工作位置(在保证不伤害病人的情况下),根据预先测量的患者上肢基本尺寸和患者坐姿肩高,调整座椅的高度和相对于机器人的位置,调整完毕后,将患者的手握住手柄11,同时将前臂放在臂托12上,用绷带适当固定好手腕,松紧适度不能影响手腕的转动也不能使手从手柄11上脱落。通过触摸屏将患者各关节允许活动的范围输入装置内,选择一种合适的康复训练模式,设定好康复训练时间,然后启动康复训练装置,按照设定的康复训练模式,三自由度机器人手臂本体上的单作用气缸7通过进气压力的控制克服单作用气缸7内的弹簧力和外负载,使机器人末端做垂直移动以及停在某个位置,垂直移动的距离由三维力传感器25检测的压力适时反馈给在控制单元内的计算机进行运算处理,大臂1和小臂2由对应的第一关节电机和第二关节电机带动对应的同步带和减速器驱动,进而完成协调动作。各关节的运动角度和速度由各电机自带的光电编码器检测,并实时反馈到控制器,通过运算控制器发出下一步的电机动作指令。三个关节通过驱动-检测-反馈-处理-驱动的闭环伺服控制使得各关节的运动的精确平稳。在训练过程中,可以根据患者各自上肢康复的具体状况,通过按键操作设置不同动作次数、速度和训练强度。
综上所述:本装置大臂、小臂关节分别由对应的第一关节电机、第二关节电机驱动,实现肩关节和肘关节在水平面内的旋转运动,末端的垂直移动由单作用气缸驱动,实现末端在矢状面的运动,大臂和小臂的转动自由度以及单作用气缸的移动自由度都实现闭环伺服控制,三自由度的协调运动可以带动机器人末端在空间内进行三维复合运动,带动患者上肢实现全方位的康复训练。
以上显示和描述了本发明的基本原理、主要特征和优点,本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内,本发明要求保护范围由所附的权利要求书及其等效物界定。

Copyright © 宁波鄞州盖奇同步带轮有限公司 2007-2022 All Rights Reserved.
电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:浙江省宁波市鄞州区姜山镇蔡郎桥村姜南路39-2 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持 浙公网安备33021202003319号
电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:浙江省宁波市鄞州区姜山镇蔡郎桥村姜南路39-2 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持 浙公网安备33021202003319号