产品搜索
当前位置:首页->一种用于搬运装箱的多机器人协同控制系统及控制方法
一种用于搬运装箱的多机器人协同控制系统及控制方法
【申请公布号:CN114115137A;申请权利人: 广州中国科学院先进技术研究所;发明设计人: 王建; 王卫军; 张弓; 候至丞; 杨文林; 徐征; 梁济民;】
摘要:
本发明公开了一种用于搬运装箱的多机器人协同控制系统,包括:同步带、待搬运工件,搬运主机器人、搬运从机器人、装箱机器人、视觉系统,所述搬运主机器人、搬运从机器人和装箱机器人之间相互通信,所述视觉系统与所述搬运主机器人和搬运从机器人之间相互通信,所述视觉系统安装在所述同步带上,所述同步带上建立有固定参考坐标系和待搬运工件识别单元坐标系。本发明在运行过程中如果机器人轨迹发生偏移,机器人控制器能够及时生成运动控制指令调整机器人的运行状态,使之按照规划的轨迹运行,减少误差。
主权项:
1.一种用于搬运装箱的多机器人协同控制系统,包括:同步带、待搬运工件,其特征在于,还包括:搬运主机器人、搬运从机器人、装箱机器人、视觉系统,所述搬运主机器人、搬运从机器人和装箱机器人之间相互通信,所述视觉系统与所述搬运主机器人和搬运从机器人之间相互通信,所述视觉系统安装在所述同步带上,所述同步带上建立有固定参考坐标系和待搬运工件识别单元坐标系。
要求
1.一种用于搬运装箱的多机器人协同控制系统,包括:同步带、待搬运工件,其特征在于,还包括:搬运主机器人、搬运从机器人、装箱机器人、视觉系统,所述搬运主机器人、搬运从机器人和装箱机器人之间相互通信,所述视觉系统与所述搬运主机器人和搬运从机器人之间相互通信,所述视觉系统安装在所述同步带上,所述同步带上建立有固定参考坐标系和待搬运工件识别单元坐标系。
2.根据权利要求1所述的用于搬运装箱的多机器人协同控制系统,其特征在于,所述搬运主机器人、搬运从机器人和装箱机器人内均嵌有示教器和控制器,所述示教器用以规划待搬运工件的运动轨迹,所述控制器用于收取和发送搬运主机器人、搬运从机器人和装箱机器人三者相互之间的指令。
3.根据权利要求1所述的用于搬运装箱的多机器人协同控制系统,其特征在于,所述搬运主机器人和搬运从机器人上均安装有夹持工具。
4.根据权利要求1所述的用于搬运装箱的多机器人协同控制系统,其特征在于,所述搬运主机器人和搬运从机器人之间采用CAN总线进行数据交互。
5.根据权利要求1所述的用于搬运装箱的垛机器人系统控制系统,其特征在于,所述视觉系统与所述搬运主机器人和搬运从机器人之间采用TCP/IP网络通讯协议进行通信。
6.一种根据权利要求1-5所述的用于搬运装箱的多机器人协同控制系统的控制方法,其特征在于,包括:
S1、确认各机器人的相对位置,以及待搬运工件的实时位置;
S2、实时获取待搬运工件的频闪信号;
S3、依据S2中所获取频闪信号,判断待搬运工件是否达到指定搬运位置;
S4、规划运动轨迹,并发出搬运指令;
S5、接收S4中指令,依据运动轨迹开始搬箱作业;
S6、实时调整运动姿态,确认到达指定装箱位置;
S7、装箱机器人开始装箱作业。
一种用于搬运装箱的多机器人协同控制系统及控制方法
技术领域
本发明涉及机器人控制领域,具体涉及一种多机器人协同控制系统。
背景技术
在现代工业生产过程中,工业机器人在各行各业中得到了很广泛的应用,随着工业的发展,一些电器产品需求量越来越大,目前在相关行业电器生产还是以流水线人工搬运装箱为主,工作效率低、劳动强度大、用工成本高,严重影响制约了企业的发展。
一些工厂开始采用工业机器人代替人工,但是有些工件的搬运装箱需要多台机器人进行协同工作才能完成,所以控制多台机器人协同工作成为目前机器人领域的一个研究热点,特别是在复杂装配、3C行业以及柔性化制造中发挥着越来越重要的作用。
在机器人协同工作的过程中,在工作时搬运物体的跟踪定位,大小形状、两台机器人协同搬运、第三个机器人准确装箱、各个机器人的位置位姿、相互之间的配合度以及轨迹规划的实时性都是需要解决的问题。目前的机器人之间协同工作只是采用简单的定位以及示教来完成,不能动态调整机器人与机器人之间以及机器人与工作对象之间的相对位置,配合不好;有的搬运物体定位不准确,导致不能够实现实时控制机器人准确搬箱装箱,机器人之间通信数据交互速度不稳定,时间上也存在较大延迟滞后。
发明内容
为此,为了解决现有技术中的上述问题,本发明提出一种拉曼增强基底的应用方法。
本发明通过以下技术手段解决上述问题:
一种用于搬运装箱的多机器人协同控制系统,包括同步带、待搬运工件,还包括:搬运主机器人、搬运从机器人、装箱机器人、视觉系统,所述搬运主机器人、搬运从机器人和装箱机器人之间相互通信,所述视觉系统与所述搬运主机器人和搬运从机器人之间相互通信,所述视觉系统安装在所述同步带上,所述同步带上建立有固定参考坐标系和待搬运工件识别单元坐标系。
进一步的,所述搬运主机器人、搬运从机器人和装箱机器人内均嵌有示教器和控制器,所述示教器用以规划待搬运工件的运动轨迹,所述控制器用于收取和发送搬运主机器人、搬运从机器人和装箱机器人三者相互之间的指令。
进一步的,所述搬运主机器人和搬运从机器人上均安装有夹持工具。
进一步的,所述搬运主机器人和搬运从机器人之间采用CAN总线进行数据交互。
进一步的,所述视觉系统与所述搬运主机器人和搬运从机器人之间采用 TCP/IP网络通讯协议进行通信。
进一步的,本发明还提供了一种用于搬运装箱的多机器人协同控制系统的控制方法,包括:
S1、确认各机器人的相对位置,以及待搬运工件的实时位置;通过建立机器人坐标系,用以确认所述搬运主机器人、搬运从机器人和装箱机器人之间的相对位置信息;在同步带上建立固定参考坐标系和待搬运工件识别单元坐标系,用以确认待搬运工件的实时位置信息;
S2、实时获取待搬运工件的频闪信号;待搬运工件在同步带上到达目标位置时,视觉系统获取对应待搬运工件的频闪信号;
S3、依据S2中所获取频闪信号,判断待搬运工件是否达到指定搬运位置;所述搬运主机器人接收并计算所述S2获取到的频闪信号,判断待搬运工件在所述同步带上是否达到指定的搬运位置;
S4、规划运动轨迹,并发出搬运指令;判断待搬运工件达到指定搬运位置时,所述搬运主机器人内示教器规划待搬运工件的运动轨迹;并通过所述控制器把该运动轨迹发送给搬运从机器人;且向所述搬运从机器人发送对应搬箱指令;
S5、接收指令,开始搬箱作业;所述搬运从机器人依据所述S4中的运动轨迹和搬箱指令,协同所述主机器人进行搬箱作业;
S6、实时调整运动姿态,确认到达指定装箱位置;在所述S5的搬箱作业过程中,所述搬运从机器人的控制器根据所述搬运主机器人的实时运动轨迹,实时调整自身的运动姿态,配合所述搬运主机器人将待搬运工件搬运至装箱位置;
S7、装箱机器人开始装箱作业;当待搬运工件达到装箱位置时,所述搬运主机器人将实时位置信号发送至所述装箱机器人,所述装箱机器人控制器根据所述搬运主机器人发送的实时位置信号,向装箱机器人发送装箱指令,进行装箱作业。
与现有技术相比,本发明的有益效果至少包括:
本发明通过搬运主机器人、搬运从机器人、装箱机器人、视觉系统的设置,且其互相通信,在搬运装箱协同工作过程中,能够解决搬运装配过程中多个机器人之间的任务分配、工件准确定位、各个机器人相互之间的配合度以及轨迹规划的实时性问题。
附图说明
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
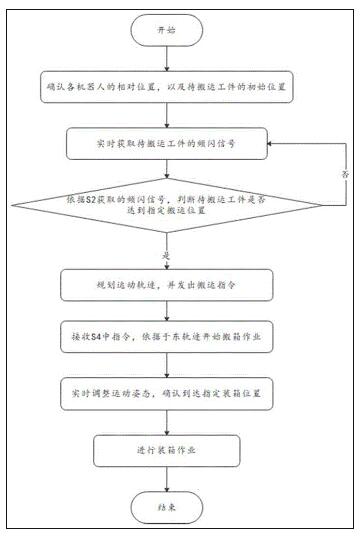
图1是本发明提供的一种用于搬运装箱的多机器人协同控制方法的流程图。

图2是本发明提供的一种用于搬运装箱的多机器人协同控制系统的结构框图。
具体实施方式
为使本发明的上述目的、特征和优点能够更加明显易懂,下面将结合附图和具体的实施例对本发明的技术方案进行详细说明。需要指出的是,所描述的实施例子仅仅是本发明一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例
一种用于搬运装箱的多机器人协同控制系统,包括同步带、待搬运工件,还包括:搬运主机器人、搬运从机器人、装箱机器人、视觉系统,所述搬运主机器人、搬运从机器人和装箱机器人之间相互通信,所述视觉系统与所述搬运主机器人和搬运从机器人之间相互通信,所述视觉系统安装在所述同步带上,所述同步带上建立有固定参考坐标系和待搬运工件识别单元坐标系。需要说明的是,这里要建立各个机器人之间(即所述的搬运主机器人、搬运从机器人和装箱机器人)、所述同步带以及所述待搬运工件之间的相对坐标系,通过计算才能获得相互之间的位置。作为优选,本发明采用先在同步带上建立固定参考坐标系和工件识别单元坐标系,所述视觉系统内的相机在拍照之后需要瞬间输出精确的strobe信号,搬运主机器人系统使用该信号来捕获相机拍照瞬间编码器数据,从而获得拍照瞬间物体的实时位置,接着机器人自动实时刷新计算同步带上的待搬运工件相对于工件识别单元坐标系的位置来确定待搬运工件是否达到指定搬运位置。
作为优选,所述搬运主机器人和搬运从机器人之间采用CAN总线进行数据交互。作为优选,所述视觉系统与所述搬运主机器人和搬运从机器人之间采用 TCP/IP网络通讯协议进行通信。作为优选,所述搬运主机器人、搬运从机器人和装箱机器人内均嵌有示教器和控制器,所述示教器用以规划待搬运工件的运动轨迹,所述控制器用于收取和发送搬运主机器人、搬运从机器人和装箱机器人三者相互之间的指令。作为优选,所述搬运主机器人和搬运从机器人上均安装有夹持工具。
需要说明的是,所述示教器对所述待搬运工件进行轨迹规划,生成运动轨迹,当工件在所述同步带上传输到指定位置时,所述搬运主机器人和搬运从机器人就会运动到适当位置协同夹持(通过所述述搬运主机器人和搬运从机器人上安装的夹持工具)待搬运工件并按照规划的轨迹进行搬运,两台搬运机器人采用主从协同控制模式,采用CAN总线进行数据交互,在搬运过程中搬运主机器人实时把运动轨迹数据传输给搬运从机器人,搬运从机器人根据相对坐标系位置计算出相对轨迹并跟随搬运主机器人运动,从而保证搬运主机器人和搬运从机器人协同搬运过程中的平稳性。作为优选,搬运过程中,搬运主机器人和搬运从机器人内的控制器会实时读取各自的各个轴的关节角,通过关节角计算出搬运主机器人和搬运从机器人末端执行器(也即上文所述的加持工具)的位置和姿态,并把数据传输给所述装箱机器人,从而计算出各自末端工具的相对位置。所述装箱机器人在读取搬运主机器人和搬运从机器人的位置和姿态,并确定其达到指定装箱位置后,所述装箱机器人开始夹取所述带搬运工件进行装箱,在装箱过程中会根据装入工件(即上文所述的经过搬运后的待搬运工件) 的情况实时调整机器人的位置姿态,保证搬运主机器人和搬运从机器人夹持的工件时各自的末端相对位姿保持不变,使得各个机器人处于稳定的运行状态。需要说明的是,以上所述的控制指令的发出和接收均由对应机器人内的对应控制器发出和接收。
与此同时,如图1所示,本发明还提供了一种用于搬运装箱的多机器人协同控制系统的控制方法,包括:
S1、确认各机器人的相对位置,以及待搬运工件的实时位置;通过建立机器人坐标系,用以确认所述搬运主机器人、搬运从机器人和装箱机器人之间的相对位置信息;在同步带上建立固定参考坐标系和待搬运工件识别单元坐标系,用以确认待搬运工件的实时位置信息。
S2、实时获取待搬运工件的频闪信号;待搬运工件在同步带上到达目标位置时,视觉系统获取对应待搬运工件的频闪信号。
S3、依据S2中所获取频闪信号,判断待搬运工件是否达到指定搬运位置;所述搬运主机器人接收并计算所述S2获取到的频闪信号,判断待搬运工件在所述同步带上是否达到指定的搬运位置。
S4、规划运动轨迹,并发出搬运指令;判断待搬运工件达到指定搬运位置时,所述搬运主机器人内示教器规划待搬运工件的运动轨迹;并通过所述控制器把该运动轨迹发送给搬运从机器人;且向所述搬运从机器人发送对应搬箱指令。
S5、接收指令,开始搬箱作业;所述搬运从机器人依据所述S4中的运动轨迹和搬箱指令,协同所述主机器人进行搬箱作业。
S6、实时调整运动姿态,确认到达指定装箱位置;在所述S5的搬箱作业过程中,所述搬运从机器人的控制器根据所述搬运主机器人的实时运动轨迹,实时调整自身的运动姿态,配合所述搬运主机器人将待搬运工件搬运至装箱位置。
S7、装箱机器人开始装箱作业;当待搬运工件达到装箱位置时,所述搬运主机器人将实时位置信号发送至所述装箱机器人,所述装箱机器人控制器根据所述搬运主机器人发送的实时位置信号,向装箱机器人发送装箱指令,进行装箱作业。
与现有技术相比,本发明的有益效果至少包括:
本发明通过搬运主机器人、搬运从机器人、装箱机器人、视觉系统的设置,且其互相通信,在搬运装箱协同工作过程中,能够解决搬运装配过程中多个机器人之间的任务分配、工件准确定位、各个机器人相互之间的配合度以及轨迹规划的实时性问题。在搬运装箱作业过程中如果机器人轨迹发生偏移,机器人控制器能够及时生成运动控制指令调整机器人的运行状态,使之按照规划的轨迹运行,减少误差。
以上所述实施例仅表达了本发明的一种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。

Copyright © 宁波鄞州盖奇同步带轮有限公司 2007-2022 All Rights Reserved.
电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:浙江省宁波市鄞州区姜山镇蔡郎桥村姜南路39-2 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持 浙公网安备33021202003319号
电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:浙江省宁波市鄞州区姜山镇蔡郎桥村姜南路39-2 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持 浙公网安备33021202003319号