产品搜索
当前位置:首页->一种轻量化的机械臂机构
【申请号:201310176775.X;申请人:中国科学院自动化研究所;发明人:王硕、谭民、王宇、周超】
摘要:
本发明涉及一种轻量化的机械臂,包括:大臂、小臂、抓手、防水基座、驱动机构、电源装置和控制装置;所述驱动机构包括分别用于驱动大臂、小臂和抓手的同步带轮式驱动机构,所述同步带轮式驱动机构由电机通过同步带传动的方式来驱动大臂、小臂和抓手的运动;所述防水基座、驱动机构、电源装置和控制装置集中装配在防水基座内;所述电源装置用于向电机和控制装置供电,所述控制装置用于控制电机的运动。本发明结构简单,所述大臂和所述小臂采用铝质材料,臂的质量轻,整个机械臂的质量集中在所述防水基座上。本发明可为移动机器人增加作业臂,具有一定的实用性。
要求:
1 .一种轻量化的机械臂机构,其包括大臂、小臂、抓手、防水基座、驱动机构、电源装置和控制装置;所述驱动机构包括分别用于驱动大臂、小臂和抓手的同步带轮式驱动机构,所述同步带轮式驱动机构由电机通过同步带传动的方式来驱动大臂、小臂和抓手的运动;所述防水基座、驱动机构、电源装置和控制装置集中装配在防水基座内;所述电源装置用于向电机和控制装置供电,所述控制装置用于控制电机的运动。
2 .根据权利要求 1 所述的机械臂,其特征在于:所述防水基座利用防水密封圈进行防水。
3 .根据权利要求 1 所述的机械臂,其特征在于:所述驱动机构包括电机和同步带轮机构,所述同步带轮机构包括电机输出端的主动轮、从动轮以及连接所述主动轮与从动轮之间同步带;其中,所述从动轮位于带动大臂、小臂和抓手运动的轴上。
4 .根据权利要求 3 所述的机械臂,其特征在于:所述大臂经 1 个同步带实现传动,小臂经 2 个同步带实现传动,抓手经 3 个同步带实现传动。
5 .根据权利要求 4 所述的机械臂,其特征在于,大臂的驱动机构包括大臂驱动电机、大臂主动轮、大臂从动轮和大臂同步带,所述大臂主动轮安装在大臂驱动电机的输出轴上,所述大臂从动轮安装在带动大臂运动的大臂轴上,所述大臂主动轮和大臂从动轮通过大臂同步带连接。
6 .根据权利要求 4 所述的机械臂,其特征在于,小臂的驱动机构包括:小臂驱动电机、小臂主动轮、第一小臂从动轮、第二小臂从动轮、第三小臂从动轮、第一小臂同步带和第二小臂同步带;所述小臂主动轮安装在所述小臂驱动电机的输出轴上,所述第一从动轮和第二从动轮安装在带动大臂运动的大臂轴上,所述小臂主动轮与所述第一从动轮通过第一小臂同步带连接;所述第三从动轮安装在带动所述小臂运动的小臂轴上,第二从动轮与所述第三从动轮通过第二小臂同步带连接。
7 .根据权利要求 4 所述的机械臂,其特征在于:抓手的驱动机构包括:抓手驱动电机、抓手主动轮、第一抓手从动轮、第二抓手从动轮、第三抓手从动轮、第四抓手从动轮、第五抓手从动轮、第一抓手同步带、第二抓手同步带和第三抓手同步带;其中,所述抓手主动轮安装在所述抓手驱动电机的输出轴上,第一抓手从动轮和第二抓手从动轮安装在带动所述大臂运动的大臂轴上,第三抓手从动轮和第四抓手从动轮安装在带动所述小臂运动的小臂轴上,第五抓手从动轮位于小臂上;所述抓手主动轮和第一抓手从动轮通过第一抓手同步带连接,第二抓手从动轮和第三抓手从动轮通过第二抓手同步带连接,第四抓手从动轮和第五抓手从动轮通过第三抓手同步带连接。
8 .根据权利要求 1 一 7 任一项所述的机械臂,其特征在于:所述机械臂为连杆式机械臂通过在各臂连杆上开槽的方式来降低重量。
9 .根据权利要求 1 一 7 任一项所述的机械臂,其特征在于:所述控制装置包括基于现场可编程门阵列的驱动模块和电机驱动器;所述基于现场可编程门阵列的驱动模块用于从外部接收控制命令,并根据控制命令产生脉宽调制信号传送给电机驱动器。
10 .根据权利要求 1 一 7 任一项所述的机械臂,其特征在于:所述大臂、小臂和抓手由铝制材料构成,所述防水基座采用 ABS 材料制作。
技术领域
本发明涉及机电一体化技术领域,具体涉及可供水下机器人等机器人系统使用的轻量化的机械臂机构。
背景技术
随着科学技术的发展,海洋资源的开发备受关注,海洋拥有丰富的矿物质、石油和天然气等能源,海洋资源的开发是解决能源短缺的重要措施。水下机器人是海洋资源开发最重要的基础设施,利用水下机器人能够完成大量人类无法完成的工作,为了完成抓取任务,水下机器人一般都会配备作业臂来抓取目标。
《 HusTSF 自动更换工具作业机械手运动学及计算机仿真系统研究 》 (机械与电子, 2003 ( 3 ) : 67 一 71 )中的 HusT 一 SF 水下作业臂,具有六个自由度,采用液压驱动; 《 基于能源消耗最下的自治水下机器人一机械手系统协调运动研究 》 (机器人, 2006 : 28 ( 4 ) : 444 一 452 )提到的三自由度水下机械手采用连杆机构,由内藏的直线步进电机驱动; 《 水下机械手控制系统研究 》 (机械设计与制造, 2009 : 185 一 187 )中的水下机械手采用转动关节式结构,具有四个自由度,采用伺服电机驱动,水下机械手各关节都采用电机内置式结构。上述提到的水下作业臂采用的电机或者液压缸都安置在每个关节处,比较笨重,与本申请的机械结构有很大区别。
发明内容
本发明目的在于提供一种具有臂身重量轻、结构紧凑、作业稳定的机械臂,可配备在各类机器人系统上使用。本发明将电机和驱动器集成在防水基座内,通过传动装置驱动机械臂的各轴,从而有效降低了大臂、小臂等各连杆和关节的重量,并能保证机械臂实现稳定的抓取。
本发明采用的技术方案是:
一种轻量化的机械臂机构,其包括大臂、小臂、抓手、防水基座、驱动机构、电源装置和控制装置;所述驱动机构包括分别用于驱动大臂、小臂和抓手的同步带轮式驱动机构,所述同步带轮式驱动机构由电机通过同步带传动的方式来驱动大臂、小臂和抓手的运动;所述防水基座、驱动机构、电源装置和控制装置集中装配在防水基座内;所述电源装置用于向电机和控制装置供电,所述控制装置用于控制电机的运动。
所述防水基座:位于臂身的下方,内部放置大臂电机、小臂电机、抓手电机、电源装置、控制装置,采用 ABS 材料制作,通过密封圈进行密封,具有防水功能。
所述驱动机构:包括电机、同步带轮机构。其中,所述电机放置在所述防水基座中,每个所述电机再进行轴密封对其进行防水,所述同步带轮包括电机输出端的主动轮、从动轮、以及连接所述主动轮与从动轮之间同步带。所述电机通过同步带轮机构带动所述臂身来进行水下作业。
所述控制装置:包括 PC104 工控机、基于现场可编程门阵列( FPGA )的驱动模块和电机驱动器。由 Pc104 工控机运行机械臂的逆运动学解算、闭环控制等算法并将结果输出至基于 FPGA 的驱动模块,由基于 FPGA 的驱动模块将 PC104 工控机的输入转换为 PWM 信号输出至电机驱动器驱动所述电机运动。
所述电源装置:放置在防水基座中,是对所述电机和对所述控制装置供电的充电电池组。
本发明可供水下机器人等机器人系统使用,采用以上技术方案,具有结构紧凑,防水易实现,臂身重量轻等特点,将带动机械臂的电机、所述电源装置、所述控制装置放置在一起,密封在所述防水基座中,进行统一的防水,每个电机再进行轴密封,简单易实现。大臂、小臂、抓手采用铝制材料制作,其电机和驱动器都放置在防水基座中,臂身部分只有连杆,并在连杆上开槽以减轻臂身的重量,在作业时整个机械臂的质量集中在防水基座中,使机械臂能更稳定的完成水下作业。
附图说明
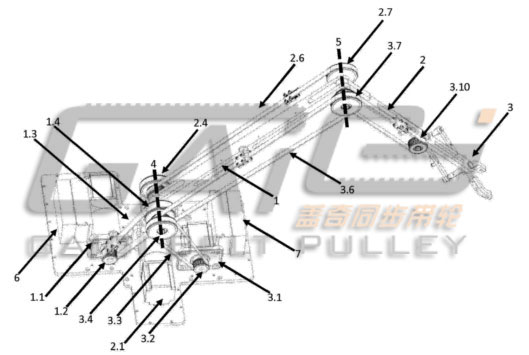
图 1 示出了本发明中轻量化的机械臂机构的整体结构示意图;
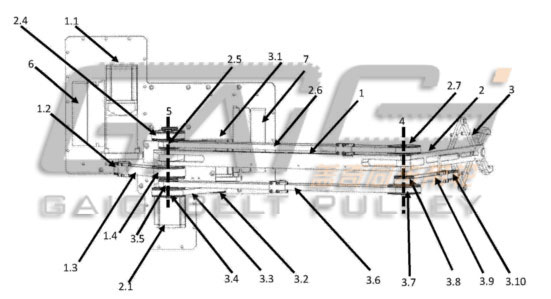
图 2 示出了本发明中轻量化的机械臂机构的俯视装配示意图;
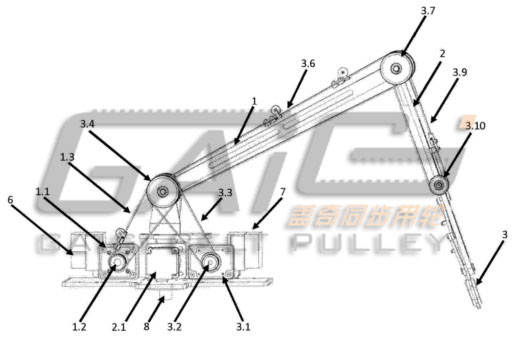
图 3 示出了本发明中轻量化的机械臂机构的左视装配示意图;
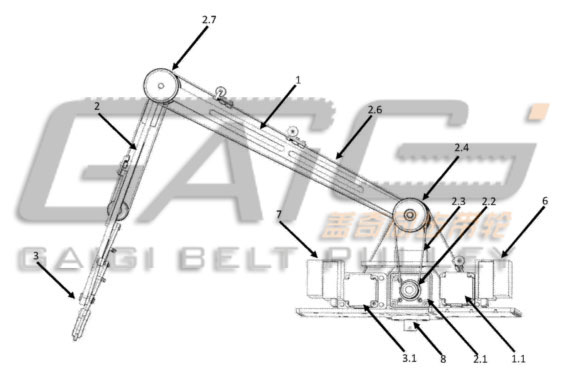
图 4 示出了本发明中轻量化的机械臂机构的右视装配示意图;
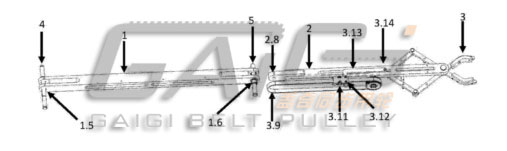
图 5 示出了本发明中轻量式的机械臂机构的臂身结构示意图
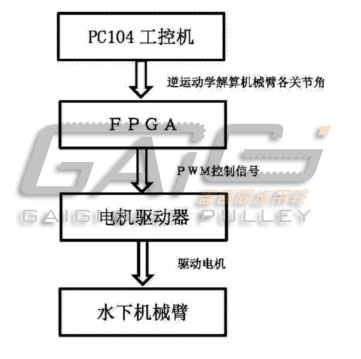
图 6 给出了本发明中轻量化三维机械臂机构中的控制装置结构图。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚明白,以下结合具体实施例,并参照附图,对本发明作进一步的详细说明。
图 1 示出了本发明公开的一种轻量化的机械臂机构的整体结构示意图。图 2 示出了本发明公开的轻量化的机械臂机构的俯视装配示意图;图 3 示出了本发明公开的轻量化的机械臂机构的左视装配示意图;图 4 示出了本发明公开的轻量化的机械臂机构的右视装配示意图;图 5 示出了本发明公开的轻量式的机械臂机构臂身结构示意图。
如图 1 、图 2 、图 3 、图 4 、图 5 所示,所述机械臂机构包括:大臂 1 、小臂 2 、抓手 3 、电源装置 6 、控制装置 7 、基座轴 8 、防水基座 9 和驱动机构,所述驱动机构为同步带轮式驱动机构,其包括大臂驱动机构、小臂驱动机构和抓手驱动机构三种,其分别用于带动大臂 1 、小臂 2 和抓手 3 运动。所述同步带轮包括电机输出端的主动轮、从动轮、以及连接所述主动轮与从动轮之间同步带。所述驱动机构中的电机通过同步带轮传动的方式带动连杆式机械臂。所述防水基座 9 位于臂身的下方,采用 ABS 材料制作,其利用防水密封圈进行防水,内部放置有带动机械臂的大臂电机 1 . 1 、小臂电机 2 . 1 、抓手电机 3 . 1 、电源装置 6 和控制装置 7 ,其中大臂电机 1 . 1 、小臂电机 2 . 1 、抓手电机 3 . 1 分别利用防水密封圈在相应的电机轴上实现轴密封防水。所述电源装置是用于对所述电机和对所述控制装置供电的充电电池组。
大臂 1 由大臂驱动机构带动,通过轴承安装在大臂轴 4 上。所述大臂驱动机构包括大臂电机 1 . 1 、大臂主动轮 1 . 2 、大臂电机同步轮 1 . 4 以及大臂同步带 1 . 3 。其中,大臂电机主动轮 1 . 2 安装在大臂电机 1 . 1 的输出轴上,大臂同步轮 1 . 4 安装大臂轴 4 上,大臂电机主动轮 1 . 2 与大臂同步轮 1 . 4 通过同步带 1 . 3 连接,则大臂电机 1 . 1 转动可带动大臂轴 4 旋转,大臂 1 绕着所述大臂轴做上下运动。小臂 2 由小臂驱动机构带动,通过轴承安装在小臂轴 5 上。所述小臂驱动机构包括小臂电机 2 . 1 、小臂电机主动轮 2 . 2 、第一小臂电机大同步轮 2 . 4 、第二小臂电机小同步轮 2 . 5 、第三小臂电机同步轮 2 . 7 、第一小臂大同步带 2 . 3 和第二小臂小同步带 2 . 6 ;其中,所述小臂电机主动轮 2 . 2 安装在小臂电机 2 . 1 的输出轴上,第一小臂电机大同步轮 2 . 4 和第二小臂电机小同步轮 2 . 5 构成具有减速功能的传动机构,通过轴承安装在大臂轴 4 上,小臂电机主动轮 2 . 2 与第一小臂电机大同步轮 2 . 4 通过同步带 2 . 3 连接,第三小臂电机同步轮 2 . 7 安装在小臂轴 5 上,第二小臂电机小同步轮 2 . 5 与第三小臂电机同步轮 2 . 7 通过同步带 2 . 6 连接,则小臂电机 2 . 1 的转动可带动小臂轴 5 旋转,进而转动小臂 2 上下运动。
抓手 3 由抓手驱动机构带动,其包括:抓手电机 3 . 1 、抓手电机主动轮 3 . 2 、第一抓手电机大同步轮 3 . 4 、第二抓手电机小同步轮 3 . 5 、第三抓手电机大同步轮 3 . 7 、第四抓手电机小同步轮 3 . 8 、第五抓手电机同步轮 3 . 10 、第一抓手电机同步带 3 . 3 、第二抓手电机同步带 3 . 6 和第三电机同步带 3 . 9 。其中,所述抓手电机主动轮 3 . 2 安装在抓手电机 3 . 1 的输出轴上,第一抓手电机大同步轮 3 . 4 和第二抓手电机小同步轮 3 . 5 、第三抓手电机大同步轮 3 . 7 和第四抓手电机小同步轮 3 . 8 分别构成具有减速功能的传动机构,第一抓手电机大同步轮 3 . 4 和第二抓手电机小同步轮 3 . 5 通过轴承安装大臂轴 4 上,抓手电机主动轮 3 . 2 与第一抓手电机大同步轮 3 . 4 通过第一同步带 3 . 3 连接,第三抓手电机大同步轮 3 . 7 和第四抓手电机小同步轮 3 . 8 通过轴承安装大臂轴 5 上,第二抓手电机小同步轮 3 . 5 与第三抓手电机大同步轮 3 . 7 通过第二同步带 3 . 6 连接,第五抓手电机同步轮 3 . 10 位于小臂 2 上,所述第四抓手电机小同步轮 3 . 8 与第五抓手电机同步轮 3 . 10 通过第三同步带 3 . 9 连接,连接器件 3 . H 固定在第三同步带 3 . 9 上,杆件 3 . 13 通过螺钉 3 . 12 连接到连接器件 3 . 11 ,抓手 3 通过螺钉 3 . 14 连接到杆件 3 . 13 上,则小臂电机 3 . 1 转动可带动抓手 3 进行抓取任务。
其中,大臂、小臂和抓手由铝制材料构成,采用连杆方式连接,大臂 1 通过孔 1 . 5 利用轴承连接到大臂轴 4 上,通过孔 1 . 6 利用轴承连接到小臂轴 5 上,小臂 2 通过孔 2 . 8 利用轴承连接到小臂轴 5 上,杆件 3 . 13 和抓手 3 分布在小臂 2 上下侧,用螺钉 3 . 14 固定。,其中,在大臂和小臂的连杆上开槽以降低其重量。
图 6 给出了本发明公开的轻量化三维机械臂机构中的控制装置结构图。如图 6 所示,该控制装置包括现场可编程门阵列( FPGA )的驱动模块和电机驱动器。外部的 PC104 工控机实现机械臂的控制算法,算法包括逆运动学解算、闭环控制,并实时生成机械臂关节的转动角度控制命令,控制命令由 PC104 工控机发送给基于现场可编程门阵列( FPGA )的驱动模块, FPGA 驱动模块接收控制命令,将产生控制电机的脉宽调制信号( PWM 信号) , PWM 信号经过驱动器放大之后输出给各电机驱动器,实现机械臂的抓取任务。
以上所述的具体实施例,对本发明的目的、技术方案和有益效果进行了进一步详细说明,应理解的是,以上所述仅为本发明的具体实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。

Copyright © 宁波鄞州盖奇同步带轮有限公司 2007-2022 All Rights Reserved.
电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:浙江省宁波市鄞州区姜山镇蔡郎桥村姜南路39-2 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持 浙公网安备33021202003319号
电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:浙江省宁波市鄞州区姜山镇蔡郎桥村姜南路39-2 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持 浙公网安备33021202003319号