【申请号:201410368029.5;申请人:东莞市奥思睿德世浦电子科技有限公司;发明人:阴紫腾、孙孝文】
摘要:
本发明公开了一种送料机械手,包括伺服电机和同步带,伺服电机连接同步带,同步带上设有第一活动架,第一活动架与第二导轨连接,第一活动架上设有气缸,气缸连接连接板,连接板上连接第二活动架,第二活动架与第一活动架通过第一活动架上的第一导轨相互连接,连接板的两端分别设有上缓冲器和下缓冲器,第二活动架底部连接吸盘架,吸盘架底部设有两个吸盘。送料机械手处于卸料位置,当焊接台面需要下料时,送料机械手移动到焊接台面下料位置,真空吸盘下降吸住 LCM 后上升,然后移动到卸料位置,真空吸盘下降,真空释放,真空吸盘将 LCM 放在出料输送带上,真空吸盘上升,高效快捷,提高了设备的工作效率。
要求:
1 .一种送料机械手,包括伺服电机( 3 )和同步带( 4 ) ,其特征在于,所述伺服电机( 3 ) 连接同步带( 4 ) ,同步带( 4 )连接设置在第二导轨( 6 )上的第一活动架( 10 ) ,第一活动架 ( 10 )与第二导轨( 6 )相互垂直,第一活动架( 10 )上设有一气缸( 5 ) ,所述气缸( 5 )底部垂直连接一块连接板( 11 ) ,连接板( 11 )底部垂直连接第二活动架( 12 ) ,第一活动架( 10 )上设有一第一导轨( 2 ) ,第二活动架( 12 )与第一活动架( 10 )通过第一导轨( 2 )相互连接,第二活动架( 10 )底部垂直连接一吸盘架( 8 ) ,吸盘架( 8 )底部设有真空吸盘。 2 .根据权利要求 1 所述的送料机械手,其特征在于,所述第二导轨( 6 )为水平方向的导轨,所述第一导轨( 2 )为垂直方向的导轨。 3 .根据权利要求 1 所述的送料机械手,其特征在于,所述连接板( 11 )的两端分别设有上缓冲器( 1 )和下缓冲器( 7 )。 4 .根据权利要求 1 所述的送料机械手,其特征在于,所述第二活动架( 12 )与吸盘架 ( 8 )之间设有加强筋。
技术领域
本发明涉及一种送料机械手,尤其是一种应用于全自动背光模组组装焊接设备的送料机械手。
背景技术
LCM 即为液晶显示模块,传统的 LCM 的组装焊接后的下料采用的是人工下料的方式,而由于下料的速度比较慢,组装焊接设备的工作效率就受到限制,降低了生产效率。
发明内容
本发明提出了一种送料机械手,可快速将 LcM 从焊接台面上转移至输送带,加快送料速度,提高生产效率。
为实现这一目的,本发明所采用的结构是:一种送料机械手,包括伺服电机和同步带,所述伺服电机连接同步带,同步带连接设置在第二导轨上的第一活动架,第一活动架与第二导轨相互垂直,第一活动架上设有一气缸,所述气缸底部垂直连接一块连接板,连接板底部垂直连接第二活动架,第一活动架上设有一第一导轨,第二活动架与第一活动架通过第一导轨相互连接,第二活动架底部垂直连接一吸盘架,吸盘架底部设有真空吸盘。
所述第二导轨为水平方向的导轨,所述第一导轨为垂直方向的导轨。
所述连接板的两端分别设有上缓冲器和下缓冲器。
所述第二活动架与吸盘架之间设有加强筋。
其有益效果是:送料机械手处于卸料位置,当焊接台面需要下料时,送料机械手移动到焊接台面下料位置,真空吸盘下降吸住 LCM 后上升,然后移动到卸料位置,真空吸盘下降,真空释放,真空吸盘将 LCM 放在出料输送带上,真空吸盘上升,高效快捷,提高了设备的工作效率。
附图说明
本发明将通过例子并参照附图的方式说明,其中:
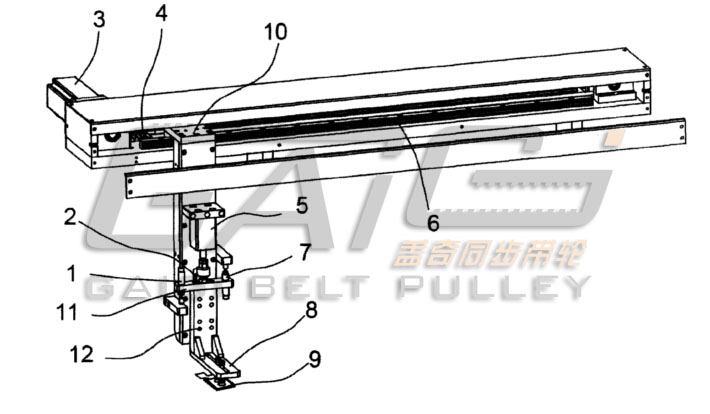
图 1 是本发明结构示意图。
具体实施方式
本说明书中公开的所有特征,或公开的所有方法或过程中的步骤,除了互相排斥的特征和/或步骤以外,均可以以任何方式组合。
本说明书(包括任何附加权利要求、摘要和附图)中公开的任一特征,除非特别叙述,均可被其他等效或具有类似目的的替代特征加以替换。即,除非特别叙述,每个特征只是一系列等效或类似特征中的一个例子而已。
如图 1 所示的一种送料机械手,包括伺服电机 3 和同步带 4 ,伺服电机 3 连接并控制同步带 4 的运行,同步带 4 与一第二导轨 6 上的第一活动架 10 连接,第二导轨 6 为水平方向的导轨,在同步带 4 的带动下,第一活动架 10 沿第二导轨 6 在水平方向上移动。第一活动架 10 与第二导轨 6 相互垂直,第一活动架 10 上设有一气缸 5 ,气缸 5 底部通过气缸 5 的活塞垂直连接一连接板 11 ,连接板 H 底部垂直连接有第二活动架 12 ,第一活动架 10 上设有一垂直方向的第一导轨 2 ,第一活动架 10 与第二活动架 12 通过第一导轨 2 相互连接,在气缸 5 的作用下,第二活动架 12 沿着第一导轨 2 在垂直方向上移动。连接板 H 的两端分别设置有上缓冲器 1 和下缓冲器 7 ,缓冲器对第二活动架 12 的升降行程起调节作用。第二活动架 12 的底部垂直连接有一吸盘架 8 ,吸盘架 8 的底部设置有真空吸盘。
送料机械手处于卸料位置,当焊接台面需要下料时,送料机械手移动到焊接台面下料位置,真空吸盘下降吸住 LCMg 后上升,然后移动到卸料位置,真空吸盘下降,真空释放,真空吸盘将 LCMg 放在出料输送带上即完成一次卸料,自动化程度高,高效快捷,大大提高装配焊接设备的工作效率。
本发明并不局限于前述的具体实施方式。本发明扩展到任何在本说明书中披露的新特征或任何新的组合,以及披露的任一新的方法或过程的步骤或任何新的组合。

电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:浙江省宁波市鄞州区姜山镇蔡郎桥村姜南路39-2 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持 浙公网安备33021202003319号