【申请号:201410663950.2;申请人:哈尔滨工程大学;发明人:徐建安、孙洪雨、宁献良、孔德慧、李建正、王锡东、高听】
摘要:
本发明的目的在于提供摆动式水翼潮流能发电装置,包括三套曲柄摇杆机构、翼片、同步带和带轮、旋转轴、扭矩计、增速箱、飞轮、发电机。通过俯仰运动四杆机构可有效地实现水翼的上下摆动运动到旋转轴单向旋转运动的转化,继而带动另一套摆动四杆机构,将曲柄的旋转运动转化为摆动摆杆的上下摆动运动,来有效的控制翼片摆角的运动规律,旋转轴的转速再通过增速箱增速后,最终将能量传递给发电机进行能量利用。本发明巧妙的利用四杆机构机械性能本身的特性,实现装置的自动捕能过程,避免了以往的捕能装置机构复杂及利用电机控制等造成的能量损失,在未来的潮流能能量捕获方面有很大的发展空间。
要求:
1 .摆动式水翼潮流能发电装置,其特征是:包括主支撑框架、副支撑框架、发电机( 1 )、旋转轴( 9 )、摆动轴( 15 )、俯仰轴( 24 )、第一俯仰连杆( 13 )、第二俯仰连杆( 27 )、摆动连杆 ( 12 ) ,旋转轴( 9 )、摆动轴( 15 )、俯仰轴( 24 )按照自上而下的顺序依次安装在主支撑框架里,摆动轴( 15 )和俯仰轴( 24 )通过其各自对应的轴承与主支撑框架配合,旋转轴( 9 )包括第一段一第四段,第一段通过轴承与主支撑框架配合,第一段和第二段之间安装第一组俯仰曲柄( 11 ) ,第一俯仰连杆( 13 )上端通过销轴与第一组俯仰曲柄( 11 )相连,第二段和第三段之间安装摆动曲柄( 10 ) ,摆动连杆( 12 )的上端通过销轴与摆动曲柄( 10 )相连,第三段和第四段之间安装第二组俯仰曲柄( 7 ) ,第二俯仰连杆( 27 )通过销轴与第二组俯仰曲柄 ( 7 )相连,第四段通过轴承与主支撑框架配合,摆动轴( 15 )上安装摆动摆杆( 14 )、大轮,摆动摆杆( 14 )和摆动连杆( 12 )通过销轴相连,俯仰轴( 24 )上安装第一俯仰摆杆( 17 )、第一带轮、小轮、第二俯仰摆杆( 25 ) ,第一俯仰摆杆( 17 )和第二俯仰摆杆( 25 )的端部之间安装翼片( 22 ) ,翼片上安装第二带轮( 20 ) ,第一带轮和第二带轮( 20 )上缠绕匀速同步带( 18 ) , 小轮和大轮上缠绕增速同步带( 16 ) ,第一俯仰摆杆( 17 )与第一俯仰连杆( 13 )通过销轴相连,第二俯仰摆杆( 25 )和第二俯仰连杆( 27 )通过销轴相连,发电机( 1 )安装在副支撑框架上,发电机( 1 )与旋转轴( 9 )的第四段相连。
2 .根据权利要求 1 所述的摆动式水翼潮流能发电装置,其特征是:所述的第一俯仰摆杆( 17 )包括依次相连的首段、中间段( 21 )和尾段,中间段( 21 )的两端与首段和尾段采用正反牙螺纹结构相连,尾段上方设置成三角形支架,第一俯仰摆杆( 17 )的三角形支架与第一俯仰连杆( 13 )相连,第二俯仰摆杆( 25 )的结构与第一俯仰摆杆( 17 )相同。
3 .根据权利要求 1 或 2 所述的摆动式水翼潮流能发电装置,其特征是:摆动曲柄( 10 ) 与第一组俯仰曲柄( 7 )和第二组俯仰曲柄( 11 )均采用相差 90 度相角的布置方式。
4 .根据权利要求 1 或 2 所述的摆动式水翼潮流能发电装置,其特征是:在发电机( 1 )和旋转轴( 9 )的第四段之间安装飞轮( 3 )、增速箱( 4 )、扭矩计( 5 )。
5 .根据权利要求 3 所述的摆动式水翼潮流能发电装置,其特征是:在发电机( 1 )和旋转轴( 9 )的第四段之间安装飞轮( 3 )、增速箱( 4 )、扭矩计( 5 )。
6 .根据权利要求 1 或 2 所述的摆动式水翼潮流能发电装置,其特征是:大轮与小轮的传动比为 3 : 1 ,第一带轮和第二带轮( 20 )的传动比为 1 : 1 。
7 .根据权利要求 3 所述的摆动式水翼潮流能发电装置,其特征是:大轮与小轮的传动比为 3 : 1 ,第一带轮和第二带轮( 20 )的传动比为 1 : 1 。 8 .根据权利要求 4 所述的摆动式水翼潮流能发电装置,其特征是:大轮与小轮的传动比为 3 : 1 ,第一带轮和第二带轮( 20 )的传动比为 1 : 1 。 9 .根据权利要求 5 所述的摆动式水翼潮流能发电装置,其特征是:大轮与小轮的传动比为 3 : 1 ,第一带轮和第二带轮( 20 )的传动比为 1 : 1 。
技术领域
本发明涉及的是一种发电装置,具体地说是潮流发电装置。
背景技术
伴随着石油和煤炭等化石燃料的过度消耗,像潮流、太阳能等可再生的开发利用越来越受到世界各国的重视。潮流作为海洋的重要形式,与太阳比,具有能量密度大、对环境污染小,变化有规律,可预测性好等优点,也被称为世界未来十大清洁能源之一。目前,对潮流能的利用形式多为旋转叶片的水轮机配合相应的发电机进行能量捕获,然而这种潮流能量捕获方式已经遇到一些指责,如:占地面积大,需要的潮流速度快,噪声大,水轮机叶片旋转速度快时会对周围的海洋生物产生影响等。
海洋中的生物,如金枪鱼、海豚、鳖鱼等,利用尾部/鳍的摆动从周围的水中获得能量实现游动,具有效率高、噪声低以及良好的水动力特性等特点。受此启发,近年来,国外开展了一种新的基于摆动式水翼的流体能量捕获技术研究,与现有的基于旋转叶片的水轮机技术相比,这种基于摆动水翼的流体能量捕获技术具有对环境影响小、噪声小,捕能效率高以及可在浅水使用等优点,另外还具有翼片结构简单,易于加工,捕能效率高等特点,大约为传统旋转水轮机 4 倍的捕能效率,在英国、爱尔兰、美国、加拿大等国家较早的开展了这方面的基础研究。我国拥有广阔的潮流能海洋资源,目前对摆动式潮流能捕能技术却一直未曾开展,在这方面,国内几乎没有公开的技术报道。国内关于摆动式利用四杆机构藕合实现水翼周期自动循环的还未见相关发明专利。
发明内容
本发明的目的在于提供利用四杆机构藕合实现水翼周期自动循环的摆动式水翼潮流能发电装置。
本发明的目的是这样实现的:
本发明摆动式水翼潮流能发电装置,其特征是:包括主支撑框架、副支撑框架、发电机( 1 )、旋转轴( 9 )、摆动轴( 15 )、俯仰轴( 24 )、第一俯仰连杆( 13 )、第二俯仰连杆( 27 )、摆动连杆( 12 ) ,旋转轴( 9 )、摆动轴( 15 )、俯仰轴( 24 )按照自上而下的顺序依次安装在主支撑框架里,摆动轴( 15 )和俯仰轴( 24 )通过其各自对应的轴承与主支撑框架配合,旋转轴 ( 9 )包括第一段一第四段,第一段通过轴承与主支撑框架配合,第一段和第二段之间安装第一组俯仰曲柄( 11 ) ,第一俯仰连杆( 13 )上端通过销轴与第一组俯仰曲柄( 11 )相连,第二段和第三段之间安装摆动曲柄( 10 ) ,摆动连杆( 12 )的上端通过销轴与摆动曲柄( 10 )相连,第三段和第四段之间安装第二组俯仰曲柄( 7 ) ,第二俯仰连杆( 27 )通过销轴与第二组俯仰曲柄( 7 )相连,第四段通过轴承与主支撑框架配合,摆动轴( 15 )上安装摆动摆杆( 14 )、大轮,摆动摆杆( 14 )和摆动连杆( 12 )通过销轴相连,俯仰轴( 24 )上安装第一俯仰摆杆( 17 )、第一带轮、小轮、第二俯仰摆杆( 25 ) ,第一俯仰摆杆( 17 )和第二俯仰摆杆( 25 )的端部之间安装翼片( 22 ) ,翼片上安装第二带轮( 20 ) ,第一带轮和第二带轮( 20 )上缠绕匀速同步带( 18 ) ,小轮和大轮上缠绕增速同步带( 16 ) ,第一俯仰摆杆( 17 )与第一俯仰连杆( 13 )通过销轴相连,第二俯仰摆杆( 25 )和第二俯仰连杆( 27 )通过销轴相连,发电机( 1 )安装在副支撑框架上,发电机( 1 )与旋转轴( 9 )的第四段相连。
本发明还可以包括:
11 、所述的第一俯仰摆杆( 17 )包括依次相连的首段、F中间段( 21 )和尾段,中间段 ( 21 )的两端与首段和尾段采用正反牙螺纹结构相连,尾段上方设置成三角形支架,第一俯仰摆杆( 17 )的三角形支架与第一俯仰连杆( 13 )相连,第二俯仰摆杆( 25 )的结构与第一俯仰摆杆( 17 )相同。
12 、摆动曲柄( 10 )与第一组俯仰曲柄( 7 )和第二组俯仰曲柄( 11 )均采用相差 90 度相角的布置方式。
13 、在发电机( 1 )和旋转轴( 9 )的第四段之间安装飞轮( 3 )、增速箱( 4 )、扭矩计 ( 5 )。
14 、大轮与小轮的传动比为 3 : 1 ,第一带轮和第二带轮( 20 )的传动比为 1 : 1 。
本发明的优势在于:
1 .本摆动水翼潮流能捕能装置,完全利用机械本身的运动特性实现装置的周期运转。具有结构简单、安装方便、传动灵活及传动效率高、噪声小、易于浅水应用等优点,在未来的潮流能能量捕获方面有很大的发展空间。
2 .装置完全利用了机械本身的运动特性,将控制翼型深沉运动的四杆和控制摆动运动的四杆进行了优化和分析,两种运动的藕合可有效的实现翼型部分的自动周期循环,巧妙的将摆动曲柄和俯仰曲柄采用了相角相差 90 度的布置方式,有效的实效了摆动四杆对翼型攻角的控制。
3 .装置采用两种四杆机构的巧妙藕合,避免了以往采用液压控制攻角及利用电机控制攻角等造成的能量损失,装置结构简单。
4 .和以往的旋转叶片的水轮机相比,具有传动效率高、噪声小、易于浅水应用等优点,对环境影响小,对水中生物影响小。
附图说明
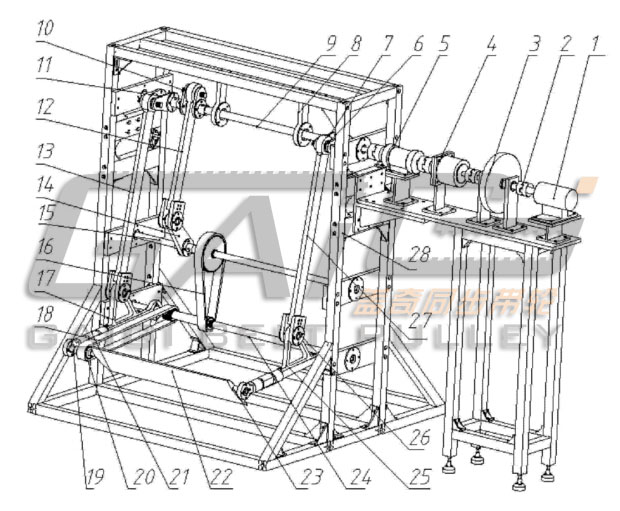
图 1 为本发明的结构示意图;
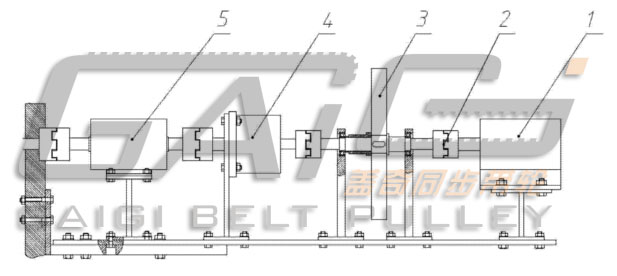
图 2 为本发明增速和发电部分结构示意图;
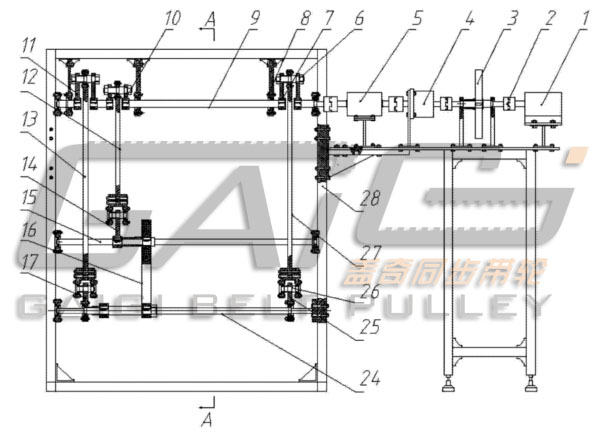
图 3 为本发明主视图;
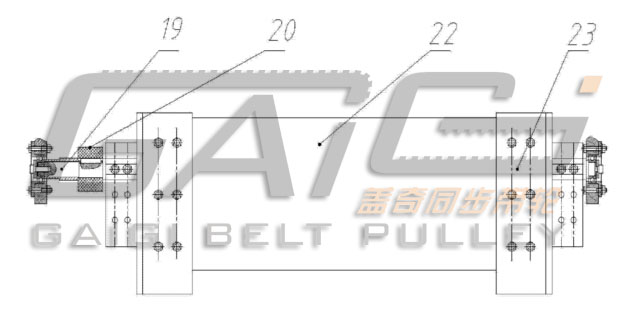
图 4 为本发明翼型运动部分结构示意图;

图 5 为 A 一 A 剖面图;
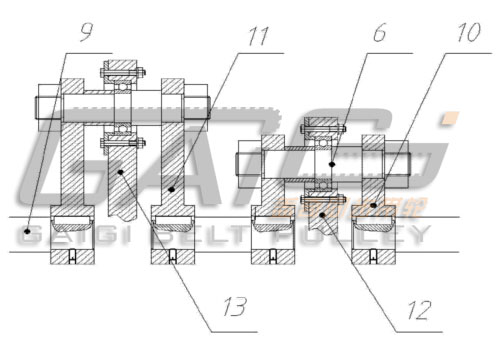
图 6 为本发明旋转轴部分摆动曲柄和俯仰曲柄连接示意图。
具体实施方式
下面结合附图举例对本发明做更详细地描述:
结合图 1 一 6 ,本发明包括的部件有:发电机 1 、联轴器 2 、飞轮 3 、增速箱 4 、扭矩计 5 、上连接销轴 6 、俯仰曲柄 7 、旋转轴定位架 8 、旋转轴 9 、摆动曲柄 10 、俯仰曲柄 11 、摆动连杆 12 、俯仰连杆 13 、摆动摆杆 14 、摆动轴 15 、增速同步带 16 、俯仰摆杆 17 、匀速同步带 18 、翼型轴 19 、带轮 20 、中间段 21 、翼片 22 、翼型端盖 23 、俯仰轴 24 、俯仰摆杆 25 、下连接销轴 26 、俯仰连杆 27 、机械本体 28 。
结构如图 1 、图 3 和图 5 所示,主要是由俯仰运动部分、摆动运动部分、翼型运动部分、旋转轴传动部分、增速和发电装置安装部分及机械本体等几部分组成。俯仰运动四杆机构部分主要是将水翼的上下升沉运动转化为旋转轴的旋转运动,主要包括上连接销轴 6 、俯仰曲柄 7 、俯仰曲柄 11 、俯仰连杆 13 、俯仰连杆 27 、俯仰摆杆 17 、俯仰摆杆 25 、下连接销轴 26 。俯仰曲柄 11 、俯仰连杆 13 、俯仰摆杆 17 和俯仰曲柄 7 、俯仰连杆 27 、俯仰摆杆 25 为两套四杆机构,这样布置有利于翼片 22 运动的平稳性和旋转轴 9 运行的稳定性。俯仰曲柄 H 和旋转轴 9 的连接如图 6 所示,俯仰曲柄 H 采用销钉和轴肩的定位方式定位于旋转轴 9 上,通过键连接的方式实现和旋转轴 9 一起旋转;俯仰连杆 13 和俯仰曲柄 H 通过上连接销轴 6 配合轴承实现连接,两侧采用圆螺母进行固定,可有效的实现俯仰连杆 13 和俯仰曲柄 H 之间的转动;俯仰连杆 13 和俯仰摆杆 17 利用下连接销轴 26 配合陶瓷轴承进行连接,俯仰摆杆 17 做了特殊的处理,采用三角形支架进行连接,即利用三角形的稳定性确保运转的平稳,也通过三角形高度和位置方面的严格保证,确保了俯仰摆杆 17 及翼片 22 在对称于水平面的竖直平面内上下周期循环,摆杆 17 采用了分三段处理方式,中间段 21 和两端的连接采用了正反牙螺纹结构,通过旋转中间段 21 可以方便的实现摆动运动部分匀速同步带 18 的安装和预紧,也可通过更改不同的中间段 21 长度来实现翼片 22 上下升沉高度的变化。
如图 1 、图 3 所示,摆动运动四杆机构部分将旋转轴 9 的旋转运动转化为摆动摆杆 14 上下摆动,通过增速同步带 16 和匀速同步带 18 来控制翼片 22 摆角的变化。主要包括摆动曲柄 10 、摆动连杆 12 、摆动摆杆 14 、增速同步带 16 、匀速同步带 18 ,摆动曲柄 10 和旋转轴 9 的连接如图 6 所示,俯摆动曲柄 10 采用销钉和轴肩的定位方式定位于旋转轴 9 上,通过键连接的方式实现和旋转轴 9 一起旋转,摆动曲柄 10 和俯仰曲柄 H 采用了 90 度的布置方式,更有利于对翼片 22 的运动规律进行控制;摆动连杆 12 和摆动曲柄 10 通过上连接销轴 6 配合轴承实现连接,摆动连杆 12 和摆动摆杆 14 利用下连接销轴 26 配合陶瓷轴承进行连接。
如图 1 、图 2 所示,增速和发电装置安装部分主要包括发电机 1 、联轴器 2 、大飞轮 3 、增速箱 4 、扭矩计 5 ,各部件通过梅花联轴器 2 连接于旋转轴 9 上,扭矩计 5 用于测量旋转轴 9 的转速和转矩,实现信号的反馈;增速箱 4 对旋转轴 9 的转速进行增速,利于能量的提取;飞轮 3 用于克服运动过程中四杆存在的死点问题,确保旋转轴 9 能平稳的旋转;发电机 1 用于最终的能量利用;旋转轴传动部分如图 1 、如图 6 ,包括旋转轴 9 、摆动曲柄 10 、俯仰曲柄 7 、俯仰曲柄 H 及上连接销轴 6 ,旋转轴 9 通过刚性的方式和曲柄进行连接。翼型运动部分如图 4 所示,主要包括翼型轴 19 、带轮 20 、翼片 22 、翼型端盖 23 ,翼型轴 19 两端配有陶瓷轴承,起到水润滑作用,翼型端盖 23 上沿弦长方向布置打有八个孔,分别位于离翼片前缘点三分之一处、四分之一处、翼片中心处、离后缘点三分之一处,每个位置各有两个孔方便和翼型轴 19 进行不同位置的连接,实现翼型上不同位置作为旋转中心点的测量;翼型轴 19 中间开有通槽,方便和翼型端盖 23 的平板进行配合和夹持。
这种实施方式的工作原理为:
摆动式水翼潮流能发电装置原理是当水流流过时,翼片 22 在水流的升力作用下上下升沉运动,带动相连的俯仰摆杆 17 和 25 一起绕着俯仰轴 24 上下摆动,通过俯仰连杆12 和 27 的传动,带动俯仰曲柄 7 和 H 一起发生旋转,由于俯仰曲柄和旋转轴 9 的刚性连接,继而带动旋转轴 9 一起发生旋转运动;摆动曲柄 10 和俯仰曲柄 7 和 H 采用了相差 90 度相角的布置方式,旋转轴 9 的旋转运动将带动摆动曲柄 10 一起发生转动,通过摆动连杆 12 的传动,继而带动摆杆 14 绕着摆动轴 15 上下摆动,由于摆动摆杆 14 和增速同步带 16 都通过键连接的方式固定于摆动轴 15 上,摆动摆杆 14 的上下摆动将带动增速同步带 16 发生传动,再通过匀速同步带 18 的二级传动来控制翼片 22 的摆角运动,翼片在升沉运动和摆动运动两种运动的藕合下,将发生周期性的自动循环运动;旋转轴 9 的旋转运动也将能量传递给增速和发电装置安装部分,由于各部件通过梅花联轴器 2 和旋转轴 9 进行连接,旋转轴 9 的旋转经增速箱 4 增速后,最终传递给发电机 1 进行能量利用,连接的扭矩计 5 用于测量旋转轴 9 的转速和转矩,用于提取功率的计算;飞轮 3 用于克服运动过程中四杆存在的死点问题,确保旋转轴 9 能平稳的旋转;本发明结构简单、安装方便、传动灵活及传动效率高、噪声小、易于浅水应用等优点,在未来的潮流能能量捕获方面有很大的发展空间。
本发明包括俯仰运动部分、摆动运动部分、翼型运动部分、旋转轴传动部分、增速和发电装置安装部分等几部分。所述的俯仰运动部分的摆杆端连接于翼型运动部分的两端,将翼型运动部分的上下升沉运动传递给旋转轴部分;摆杆运动部分通过两套同步带传动连接于翼型运动部分上,实现翼型运动部分沿旋转轴的摆动运动,翼型运动部分的升沉运动和摆动运动两种运动的巧妙藕合,实现了翼型运动部分周期性的上下升沉和摆动循环过程,从而实现了能量的提取;旋转轴的转速再通过增速箱增速后,最终将能量传递给发电机进行能量利用。
俯仰运动部分由两套曲柄摇杆机构组成,这样可确保翼型运动部分上下运动的刚性和稳定性;俯仰摆杆部分的上下摆动带动俯仰曲柄沿同一方向旋转,再传递给旋转轴部分进行传动;四个杆都经过优化过程,其长度都需有严格的保证,从而能有效的保证翼型部分的上下升沉高度和周期循环;俯仰曲柄和旋转轴部分采用了刚性连接,确保运行的同步性,各杆之间采用销轴配合轴承进行连接,可有效的实现两杆之间的转动;摆杆部分做了特殊的处理,采用三角形支架进行连接,即利用三角形的稳定性确保运转的平稳性,也通过三角形高度和位置方面的严格保证,确保了俯仰摆杆及翼型部分在对称于水平面的竖直平面内上下周期循环,俯仰摆杆也采用了分三段处理方式,中间段和两端的连接采用了正反螺纹结构,通过旋转中间段部分可以方便的实现摆动运动部分匀速同步带的安装和预紧,也可通过更改不同的中间段长度来实现翼型运动部分上下升沉高度的变化。
摆动运动部分包括一套曲柄摇杆机构和两套同步带传动机构,通过旋转轴的旋转带动曲柄匀速旋转,再通过四杆机构带动摆杆摆动,再带动相连的两套同步带发生转动,实现翼型部分摆角的控制;四杆的长度都有严格的要求,曲柄和旋转轴采用刚性进行连接,确保运行的同步性,各杆之间采用销轴配合轴承进行连接,可有效的实现两杆之间的转动;两套同步带传动一套采用 3 : 1 的传动,另一套采用 1 : 1 的传动,两套同步带采用不同的传动比进行配合,可有效的控制翼型运动部分实现不同摆角的摆动运动,实现翼型摆动运动和升沉运动的相互藕合,带轮采用双档边处理,确保带传动的平稳性;摆动曲柄和俯仰曲柄采用了相角差 90 度的布置方式。
翼型运动部分通过翼型轴连接于两个俯仰运动部分的两个摆杆之间,翼型轴端配有陶瓷轴承,翼型端盖上沿弦长方向布置打有八个孔,分别位于离翼型前缘点三分之一处、四分之一处、翼型中心处、离后缘点三分之一处,每个位置各两个孔方便和翼型轴进行不同位置的连接,实现翼型上不同位置作为旋转中心点的测量;翼型轴中间开有通槽,方便和翼型端盖的平板进行配合和夹持。
旋转轴传动部分包括四个短轴部分、摆动曲柄、俯仰曲柄及连接销。四个短轴通过刚性的方式和曲柄进行连接,中间的较长的一段轴通过两个装有轴承的支撑件连接于机械本体上,这样既保证了旋转轴能平稳旋转,也能保证几段短轴运行的同轴度。
增速和发电装置安装部分包括扭矩计、增速箱、飞轮、发电机及联轴器。扭矩计用于测量旋转轴的转速和扭矩,用于提取功率的计算;增速箱对旋转轴的转速进行增速,利于能量的提取;飞轮用于克服运动过程中四杆存在的死点问题,确保旋转轴能平稳的旋转;发电机用于最终的能量利用,各部件采用弹性梅花联轴器和旋转轴进行连接,可补偿少量的转轴存在的旋转误差。
本发明完全利用机械本身的运动性能,实现水翼对能量的提取和利用,由俯仰运动部分、摆动运动部分、翼型运动部分、旋转轴传动部分、增速和发电装置安装部分及机械本体等几部分组成。俯仰运动部分的摆杆端分布在翼型运动部分的两端,将翼型运动部分的上下升沉运动传递给旋转轴部分;摆杆运动部分通过两套同步带传动连接于翼型运动部分上,实现翼型运动部分沿翼型轴的摆动运动,翼型运动部分的升沉运动和摆动运动两种运动的巧妙藕合,实现了翼型运动部分周期性的上下升沉和摆动循环过程,从而实现了能量的提取;旋转轴传动部分连接于增速和发电部分,通过对旋转轴增速后,最终将能量传递给发电机进行发电,实现能量利用。本发明的优点在于巧妙的利用四杆机构机械性能本身的特性,实现装置的自动捕能过程,避免了以往的捕能装置机构复杂及利用电机控制等造成的能量损失,传动效率高、噪声小、易于浅水应用。
俯仰运动部分,包括两套曲柄摇杆机构,确保了翼型部分上下运动的刚性和稳定性;俯仰摆杆部分的上下摆动带动俯仰曲柄沿同一方向旋转,再传递给旋转轴部分进行传动;四个杆都经过了优化过程,其长度都需有严格的保证,从而能有效的保证翼型部分的上下升沉高度和周期循环;俯仰曲柄和旋转轴部分采用了刚性连接,确保运行的同步性,各杆之间采用销轴配合轴承进行连接,可有效的实现两杆之间的转动;俯仰摆杆部分做了特殊的处理,采用三角形支架进行连接,即利用三角形的稳定性确保了运转的平稳性,也通过三角形高度和位置方面的严格保证,确保了俯仰摆杆及翼型部分在对称于水平面的竖直平面内上下周期循环,摆杆采用了分三段处理方式,中间段和两端的连接采用了正反牙螺纹结构,通过旋转中间段部分可以方便的实现摆动运动部分匀速同步带的安装和预紧,也可通过更改不同的中间段长度来实现翼型运动部分上下升沉高度的变化。
摆动运动部分,包括一套曲柄摇杆机构和两套同步带传动机构,通过旋转轴的旋转带动曲柄匀速旋转,再通过四杆机构带动摆杆摆动,再带动相连的两套同步带发生传动,实现翼型部分摆角的控制;四杆的长度都有严格的要求,曲柄和旋转轴采用刚性进行连接,确保运行的同步性,各杆之间采用销轴配合轴承进行连接,可有效的实现两杆之间的转动;两套同步带传动一套采用 3 : 1 的传动,另一套采用 1 : 1 的传动,两套同步带采用不同的传动比进行配合,可有效的控制翼型运动部分实现不同摆角的摆动运动,继而实现了翼型摆动运动和升沉运动的相互藕合,带轮采用双档边处理,确保带传动的平稳性;摆动曲柄和俯仰曲柄采用了相角差 90 度的布置方式。
翼型运动部分,翼型运动部分通过翼型轴连接于俯仰运动部分的两个摆杆之间,翼型轴端配有陶瓷轴承,翼型端盖上沿弦长方向布置打有八个孔,分别位于离翼型前缘点三分之一处、四分之一处、翼型中心处、离后缘点三分之一处,每个位置各有两个孔方便和翼型轴进行不同位置的连接,实现翼型上不同位置作为旋转中心点的测量;翼型轴中间开有通槽,方便和翼型端盖的平板进行配合和夹持。
旋转轴传动部分,旋转轴部分由四个短轴部分、摆动曲柄、俯仰曲柄及连接销轴组成,旋转轴通过梅花联轴器和增速及发电装置安装部分相连接。
四个短轴部分,四个短轴通过刚性的方式和曲柄进行连接,中间的较长的一段轴通过两个装有轴承的支撑件连接于机械本体上,这样既保证了旋转轴能平稳的旋转,也能保证几段短轴运行的同轴度。
增速和发电装置安装部分,由扭矩计、增速箱、飞轮、发电机及联轴器组成。扭矩计用于测量旋转轴的转速和转矩,用于提取功率的计算;增速箱用于对旋转轴进行增速,利于能量的提取;飞轮用于克服运动过程中四杆存在的死点问题,确保旋转轴能平稳的旋转;发电机用于最终的能量利用,各部件采用弹性梅花联轴器和旋转轴进行连接,可补偿少量的转轴存在的旋转误差。

电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:浙江省宁波市鄞州区姜山镇蔡郎桥村姜南路39-2 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持 浙公网安备33021202003319号