摘要:
本发明提供了一种用于负极片自动化生产线的银网输送取放方法及装置。所述用于负极片自动化生产线的银网输送取放装置包括同步带,同步带分别连接驱动电机和变速箱,变速箱的转轴连接银网转盘,驱动电机固定于机座上,机座位于银网转台支架上,银网转盘上设有多个银网放置工位,主输送线随行夹具设于负极片主流水线上,负极片主流水线上设有传送用支架,传送用支架上设有机械手传送带轮和第一导轨,传送带固定连接抓取机械手,抓取机械手可在传送带的带动下沿第一导轨在负极片主流水线上的银网输送工位与银网转盘上的银网放置工位之间来回移动。本发明可以实现银网的全自动输送及抓取,减轻了工人的劳动强度。
要求:
1.一种用于负极片自动化生产线的银网输送取放装置,其特征在于,包括机械 手传送带轮(1)、主输送线随行夹具(2)、传送带(4)、抓取机械手(6)、 第一导轨(7)、真空吸嘴(8)、银网转盘(9)、同步带(10)、分度传感器(11)、 驱动电机(12)和机座(13),同步带(10)分别连接驱动电机(12)和变速 箱,变速箱的转轴连接银网转盘(9),驱动电机(12)固定于机座(13)上, 机座(13)位于银网转台支架上,银网转盘(9)上设有多个银网放置工位, 主输送线随行夹具(2)设于负极片主流水线上,负极片主流水线上设有传送 用支架,传送用支架上设有机械手传送带轮(1)和第一导轨(7),传送带(4) 由电机驱动机械手传送带轮(1)带动,传送带(4)固定连接抓取机械手(6), 抓取机械手(6)可在传送带(4)的带动下沿第一导轨(7)在负极片主流水 线上的银网输送工位与银网转盘(9)上的银网放置工位之间来回移动,抓取 机械手(6)下端设有真空吸嘴(8)。
2.如权利要求1所述的用于负极片自动化生产线的银网输送取放装置,其特征 在于,所述的抓取机械手(6)包括抓取机械手本体,抓取机械手本体固定连 接输送滑块(23),输送滑块(23)设于第一导轨(7)上并可沿第一导轨(7) 在负极片主流水线上的银网输送工位与银网转盘(9)上的银网放置工位之间 来回移动,抓取机械手本体的上下两端各设有一个带轮支撑座,带轮支撑座 上设有带轮(18),其中一个带轮(18)连接步进电机(22)的电机轴,带轮 (18)上设有皮带(17),皮带(17)上固定有抓取滑块(15),抓取滑块(15) 位于导轨(16)上并可沿第二导轨(16)自由上下滑动,抓取滑块(15)连 接滑杆(19),滑杆(19)连接连接板(21),连接板(21)连接定位机构和 真空吸嘴(8),真空接头(26)位于连接板(21)上且与真空吸嘴(8)相通, 真空接头(26)连接真空泵。
3.如权利要求2所述的用于负极片自动化生产线的银网输送取放装置,其特征 在于,所述的定位机构包括过渡板(28),过渡板(28)连接连接板(21), 过渡板(28)连接导柱(24),导柱(24)连接定位板(27),定位板(27) 下侧设有定位锥销(29),导柱(24)外圈绕弹簧(25)。
4.如权利要求2所述的用于负极片自动化生产线的银网输送取放装置,其特征 在于,所述的抓取机械手本体的顶端设有限位传感器(14),限位传感器(14) 的移动感应部分位于输送滑块(15)上。
5.如权利要求1所述的用于负极片自动化生产线的银网输送取放装置,其特征 在于,所述的银网转台支架上还设有分度传感器(11),分度传感器(11)与 驱动电机(12)转轴的工位相对应。
6.如权利要求1所述的用于负极片自动化生产线的银网输送取放装置,其特征 在于,所述的银网转盘(9)均匀设有20个银网放置工位,银网(5)位于银 网放置工位上,且银耳的位置朝里。
7.一种银网自动抓取及输送方法,其特征在于,采用权利要求1-6中任一项所 述的用于负极片自动化生产线的银网输送取放装置,具体步骤包括:
第一步:把银网(5)放到银网转盘(9)上的各个银网放置工位上进行定位; 启动驱动电机(12)和步进电机(22),抓取机械手(6)和银网转盘(9)回到 初始位置,将真空泵打开,此时抓取机械手(6)位于银网(5)正上方;
第二步:主流水线随行夹具(2)将模框(3)输送到银网输送工位时,给抓 取机械手(6)抓取信号,此时步进电机(22)带动皮带(17)及抓取滑块(15) 沿着第二导轨(16)向下运动,与滑杆(18)相连的定位机构以及真空吸嘴(8) 向下移动到预设位置时,定位锥销(29)将银网(5)与抓取机械手(6)的相对 位置定好,然后真空吸嘴(8)打开将整个银网(5)吸取到抓取机械手(6)上, 抓取机械手(6)的真空吸嘴(8)及其吸取的银网(5)向上运动到达上限位置;
第三步:机械手传送带轮(1)带动传送带(4),通过输送滑块(23)在第 一导轨(7)上滑动,将抓取机械手(6)输送至模框(3)正上方位置,并且按 照预设位置向下运动,到达下限位置时,真空吸嘴(8)关闭,将银网(5)准确 放置于模框(3)内;
第四步:步进电机(22)带动皮带(17)及抓取滑块(15)沿着第二导轨(16) 向上运动至初始位置,机械手传送带轮(1)带动传送带(4),通过输送滑块(23) 在第一导轨(7)上滑动,将抓取机械手(6)输送回初始位置,驱动电机(12) 带动同步带(10)转动,银网转盘(9)恰好转动至下一个银网输送工位,分度 传感器(11)产生信号,驱动电机(12)停止运动,准备进行下一片银网的输送。
技术领域
本发明涉及用于负极片自动化生产线的银网输送取放方法及装置。
背景技术
负极片是锌银电池的关键部件,而银网是锌银负极片成型的重要导电部件, 在锌银负极片自动成型生产线中,银网输送环节至关重要,银网输送位置精度高 低,吸取的稳定性等直接关系着负极片的生产质量,此银网取放输送方法及专用 装备取放位置精度高,取放时稳定性好,不易掉落,可以降低工人手工放置银网 的随机性,不稳定性,提高负极片生产质量,减少负极片产品中有毒物质对工人 身体的伤害,也可以用于其它类似原材料的取放及输送。
锌银负极片电池广泛应用在航空航天及军工领域,银网是锌银负极片的关键 导电部件,由银网骨架和银耳焊接组成,其材质柔软,厚度薄,整体容易弯曲变 形,网状结构不易吸取,银网本身焊接尺寸精度不高,在锌银负极片自动化成型 生产线中,要求被准确放置在成型负极片的模框中,放置位置不准确将直接导致 负极片报废,银网的自动输送及取放是负极片成型的关键工艺,直接关系着负极 片成型质量的好坏,因此急需开发一种稳定,高效、高精度的输送及取放银网的 自动化专用装备。
发明内容
本发明所要解决的技术问题是提供一种负极片银网的取放及输送专用自动 化装备,以提高银网的输送效率及精度,最终保证负极片成型的质量稳定及避免 有毒物质对工人身体健康的伤害。
为了解决上述技术问题,本发明提供了一种用于负极片自动化生产线的银网 输送取放装置,其特征在于,包括机械手传送带轮、主输送线随行夹具、传送带、 抓取机械手、第一导轨、真空吸嘴、银网转盘、同步带、分度传感器、驱动电机 和机座,同步带分别连接驱动电机和变速箱,变速箱的转轴连接银网转盘,驱动 电机固定于机座上,机座位于银网转台支架上,银网转盘上设有多个银网放置工 位,主输送线随行夹具设于负极片主流水线上,负极片主流水线上设有传送用支 架,传送用支架上设有机械手传送带轮和第一导轨,传送带由电机驱动机械手传 送带轮带动,传送带固定连接抓取机械手,抓取机械手可在传送带的带动下沿第 一导轨在负极片主流水线上的银网输送工位与银网转盘上的银网放置工位之间 来回移动,抓取机械手下端设有真空吸嘴。
优选地,所述的抓取机械手包括抓取机械手本体,抓取机械手本体固定连接 输送滑块,输送滑块设于第一导轨上并可沿第一导轨在负极片主流水线上的银网 输送工位与银网转盘上的银网放置工位之间来回移动,抓取机械手本体的上下两 端各设有一个带轮支撑座,带轮支撑座上设有带轮,其中一个带轮连接步进电机 的电机轴,带轮上设有皮带,皮带上固定有抓取滑块,抓取滑块位于导轨上并可 沿第二导轨自由上下滑动,抓取滑块连接滑杆,滑杆连接连接板,连接板连接定 位机构和真空吸嘴,真空接头位于连接板上且与真空吸嘴相通,真空接头连接真 空泵。
更优选地,所述的定位机构包括过渡板,过渡板连接连接板,过渡板连接导 柱,导柱连接定位板,定位板下侧设有定位锥销,导柱外圈绕弹簧。
更优选地,所述的抓取机械手本体的顶端设有限位传感器,限位传感器的移 动感应部分位于输送滑块上。
优选地,所述的银网转台支架上还设有分度传感器,分度传感器与驱动电机 转轴的工位相对应。
优选地,所述的银网转盘均匀设有20个银网放置工位,银网位于银网放置 工位上,且银耳的位置朝里。
本发明还提供了一种银网自动抓取及输送方法,其特征在于,采用上述的用 于负极片自动化生产线的银网输送取放装置,具体步骤包括:
第一步:把银网放到银网转盘上的各个银网放置工位上进行定位;启动驱动 电机和步进电机,抓取机械手和银网转盘回到初始位置,将真空泵打开,此时抓 取机械手位于银网正上方;
第二步:主流水线随行夹具将模框输送到银网输送工位时,给抓取机械手抓 取信号,此时步进电机带动皮带及抓取滑块沿着第二导轨向下运动,与滑杆相连 的定位机构以及真空吸嘴向下移动到预设位置时,定位锥销将银网与抓取机械手 的相对位置定好,然后真空吸嘴打开将整个银网吸取到抓取机械手上,抓取机械 手的真空吸嘴及其吸取的银网向上运动到达上限位置;
第三步:机械手传送带轮带动传送带,通过输送滑块在第一导轨上滑动,将 抓取机械手输送至模框正上方位置,并且按照预设位置向下运动,到达下限位置 时,真空吸嘴关闭,将银网准确放置于模框内;
第四步:步进电机带动皮带及抓取滑块沿着第二导轨向上运动至初始位置, 机械手传送带轮带动传送带,通过输送滑块在第一导轨上滑动,将抓取机械手输 送回初始位置,驱动电机带动同步带转动,银网转盘恰好转动至下一个银网输送 工位,分度传感器产生信号,驱动电机停止运动,准备进行下一片银网的输送。
与现有技术相比,本发明的有益效果是:
本发明可以实现银网的全自动输送及抓取,减轻了工人的劳动强度,避免了 手工放置银网是的位置不精确和随机性大等问题,提高负极片成型质量,有效减 少负极片成型过程工人放置银网时接触有害物质,大大提高了生产质量和效率。
附图说明
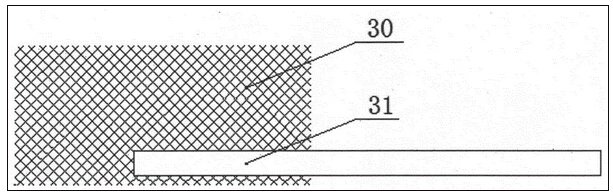
图1为银网结构示意图;

图2为用于负极片自动化生产线的银网输送取放装置结构示意图;

图3为抓取机械手主视图;
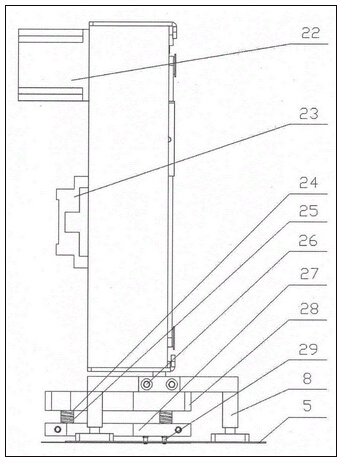
图4为抓取机械手侧视图;

图5为本发明银网抓取定位校正原理图。
图中:1-机械手传送带轮;2-主输送线随行夹具;3-模框;4-传送带; 5-银网;6-抓取机械手;7-第一导轨;8-真空吸嘴;9-银网转盘;10-同 步带;11-分度传感器;12-驱动电机;13-机座;14-限位传感器;15-抓取 滑块;16-第二导轨;17-皮带;18-带轮;19-滑杆;20-带轮支撑座;21 -连接板;22-步进电机;23-输送滑块;24-导柱;25-弹簧;26-真空接头; 27-定位板;28-过渡板;29-定位锥销,30-网状骨架,31-银耳。
具体实施方式
下面结合具体实施例,进一步阐述本发明。这些实施例仅用于说明本发明而 不用于限制本发明的范围。此外应理解,在阅读了本发明讲授的内容之后,本领 域技术人员可以对本发明作各种改动或修改,这些等价形式同样落于本申请所附 权利要求书所限定的范围。
实施例1
如图1所示,为银网结构示意图,所述的银网包括网状骨架30以及银耳31, 如图2所示,为用于负极片自动化生产线的银网输送取放装置结构示意图,所述 的用于负极片自动化生产线的银网输送取放装置主要由机械手传送带轮1、主输 送线随行夹具2、传送带4、抓取机械手6、导轨7、真空吸嘴8、银网转盘9、 同步带10、分度传感器11、驱动电机12和机座13组成,所述的同步带10分别 连接驱动电机12和变速箱,变速箱的转轴连接银网转盘9,驱动电机12固定于 机座13上,机座13位于银网转台支架上,银网转盘9上设有多个银网放置工位, 主输送线随行夹具2设于负极片主流水线上,负极片主流水线上设有传送用支 架,传送用支架上设有机械手传送带轮1和第一导轨7,传送带4由电机驱动机 械手传送带轮1带动,传送带4固定连接抓取机械手6,抓取机械手6可在传送 带4的带动下沿第一导轨7在负极片主流水线上的银网输送工位与银网转盘9上 的银网放置工位之间来回移动,抓取机械手6下端设有真空吸嘴8。所述的银网 转台支架上还设有分度传感器11,分度传感器11与驱动电机12转轴的工位相 对应。所述的银网转盘9均匀设有20个银网放置工位,银网5位于银网转盘9 的各个工位上,且银耳的位置朝里。银网5预先放置于银网转盘9的20个银网 放置工位上,银网转盘9通过分度传感器11进行20分度,即输送一片银网5, 转动30°,将下一个银网放置工位转到输送位置,当银网转盘9转动至输送工 位时,抓取机械手6垂直向下运动,此时通过定位锥销29与银网5的定位孔进 行定位配合,确定银网5与抓取机械手6的相对位置,此时完成了银网输送的定 位,然后通过抓取机械手6上的真空吸嘴8吸附银耳31,将整片银网5吸附于 抓取机械手6上,完成抓取动作。
如图3所示,所述的抓取机械手6包括抓取机械手本体,抓取机械手本体固 定连接输送滑块23,输送滑块23设于第一导轨7上并可沿第一导轨7在负极片 主流水线上的银网输送工位与银网转盘9上的银网放置工位之间来回移动,抓取 机械手本体的上下两端各设有一个带轮支撑座,带轮支撑座上设有带轮18,如 图4所示,其中一个带轮18连接步进电机22的电机轴,带轮18上设有皮带17, 皮带17上固定有抓取滑块15,抓取滑块15位于导轨16上并可沿第二导轨16 自由上下滑动,抓取滑块15连接滑杆19,滑杆19固定连接连接板21,连接板 21连接定位机构和真空吸嘴8,真空接头26位于连接板21上且与真空吸嘴8相 通,真空接头26连接真空泵。所述的定位机构包括过渡板28,过渡板28连接 连接板21,过渡板28连接导柱24,导柱24连接定位板27,定位板27下侧设 有定位锥销29,导柱24外圈绕弹簧25,所述的抓取机械手本体的顶端设有限位 传感器14,限位传感器14的移动感应部分位于输送滑块15上。
采用上述的用于负极片自动化生产线的银网输送取放装置进行银网自动抓 取及输送方法,具体步骤为:
第一步:银网抓取输送前准备动作:开始银网抓取及输送前,先把开关电源 打开,真空泵开关打开,把银网5放到银网转盘9上的各个银网放置工位上进行 定位;启动驱动电机12和步进电机22,抓取机械手6和银网转盘9回到初始位 置,将真空泵打开,此时抓取机械手6位于银网5正上方;
第二步:待银网抓取输送前准备动作完成,主流水线给出银网输送信号后, 开始银网抓取动作,具体如下:主流水线随行夹具2将模框3输送到银网输送工 位时,给抓取机械手6抓取信号,此时步进电机22带动皮带17及抓取滑块15 沿着第二导轨16向下运动,与滑杆18相连的定位机构以及真空吸嘴8向下移动 到预设位置时,定位锥销29将银网5与抓取机械手6的相对位置定好,然后真 空吸嘴8打开将整个银网5吸取到抓取机械手6上,如图5所示;抓取机械手6 的真空吸嘴8及其吸取的银网5向上运动,当到达上限位置时,整个抓取机械手 完成银网抓取动作。
第三步:完成银网抓取动作后,然后进行银网的输送及放置,具体如下:机 械手传送带轮1带动传送带4,通过输送滑块23在第一导轨7上滑动,将抓取 机械手6输送至模框3正上方位置,步进电机22带动皮带17及抓取滑块15沿 着第二导轨16向下运动,到达下限位置时,真空吸嘴8关闭,将银网5准确放 置于模框3内;
第四步:完成银网的输送及放置动作后,立即返回初始位置,进行下一银网 抓取循环,银网转盘转动,将下一放置银网的工位旋转到输送位置,具体如下: 步进电机22带动皮带17及抓取滑块15沿着第二导轨16向上运动至初始位置, 机械手传送带轮1带动传送带4,通过输送滑块23在第一导轨7上滑动,将抓 取机械手6输送回初始位置,驱动电机12带动同步带10转动,驱动电机12转 动一圈,银网转盘9恰好转动30°至下一个银网输送工位,分度传感器11产生 信号,驱动电机12停止运动,待主流水线下一个输送信号,准备进行下一片银 网的输送。

电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:浙江省宁波市鄞州区姜山镇蔡郎桥村姜南路39-2 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持 浙公网安备33021202003319号