【申请(专利)号:CN201510639208.2;申请公布号:CN106555289A;申请权利人:天津宝盈电脑机械有限公司;】
摘要:
本发明公开了手摇毛巾缝纫机跟踪轴电子助力控制装置,其包括压脚、针嘴、机针、毛巾缝纫机、机针旋转跟踪传动轴、机针上下运动传动轴、工作台面、手摇跟踪手柄、旋转编码器、电子助力控制系统、传动同步带、电机、跟踪旋转盘,所述的电机通过传动同步带驱动机针旋转跟踪传动轴转动。所述的电子助力控制系统通过旋转编码器连接跟踪旋转盘。通过在手摇毛巾的基础上增加电子助力系统,提高了毛巾缝纫机的精度和效率,降低了操作技术难度,降低了对操作工的力量要求和熟练程度要求,并且能够让操作工在操作机器过程中保持正常直立腰背,降低了工人因长时间疲劳工作而引发职业病的概率。
要求:
1.手摇毛巾缝纫机跟踪轴电子助力控制装置,其包括压脚、针嘴、机针、毛巾缝纫机、机针旋转跟踪传动轴、机针上下运动传动轴、工作台面、手摇跟踪手柄、旋转编码器、电子助力控制系统、传动同步带、电机、跟踪旋转盘,其特征在于:所述的电机通过传动同步带驱动机针旋转跟踪传动轴转动;所述的电子助力控制系统通过旋转编码器连接跟踪旋转盘。
2.根据权利要求1所述的所述的手摇毛巾缝纫机跟踪轴电子助力控制装置,其特征在于:所述的跟踪旋转盘位于工作台面上方,对应连接在机针上下运动传动轴的上轮。
3.根据权利要求1所述的所述的手摇毛巾缝纫机跟踪轴电子助力控制装置,其特征在于:所述的电子助力控制系统的中央处理器为PIC16F873。
技术领域
本发明涉及到特种缝纫机的自动化控制领域,特别是涉及手摇毛巾缝纫机跟踪轴电子助力控制装置。
背景技术
手摇毛巾缝纫机的针迹跟踪动作是通过人力转动手柄带动旋转跟踪轴来实现的。在使用过程中,操作工需要左手按照线迹轨迹方向推动缝料前进,右手摇动跟踪手柄控制跟踪方向(保持和线迹前进方向一致),两只手用力方向和方式不同,但要互相配合,操作难度较大,是一种需要经过长时间的操作训练才能掌握这种技能。而且由于缝料在台面上,手轮在台面下,操作工要长时间保持一个扭腰的姿势,容易疲劳引起职业病。
发明内容
为了克服上述现有技术的不足,本发明提供了一种手摇毛巾缝纫机跟踪轴电子助力控制装置,降低了操作技术难度,降低了对操作工的力量要求和熟练程度要求。
本发明所采用的技术方案是:手摇毛巾缝纫机跟踪轴电子助力控制装置,其包括压脚、针嘴、机针、毛巾缝纫机、机针旋转跟踪传动轴、机针上下运动传动轴、工作台面、手摇跟踪手柄、旋转编码器、电子助力控制系统、传动同步带、电机、跟踪旋转盘,所述的电机通过传动同步带驱动机针旋转跟踪传动轴转动。所述的电子助力控制系统通过旋转编码器连接跟踪旋转盘。
所述的跟踪旋转盘位于工作台面上方,对应连接在机针上下运动传动轴的上轮。
所述的电子助力控制系统的中央处理器为PIC16F873。
与现有技术相比,本发明的有益效果是:通过在手摇毛巾的基础上增加电子助力系统,提高了毛巾缝纫机的精度和效率,降低了操作技术难度,降低了对操作工的力量要求和熟练程度要求,并且能够让操作工在操作机器过程中保持正常直立腰背,降低了工人因长时间疲劳工作而引发职业病的概率。
附图说明
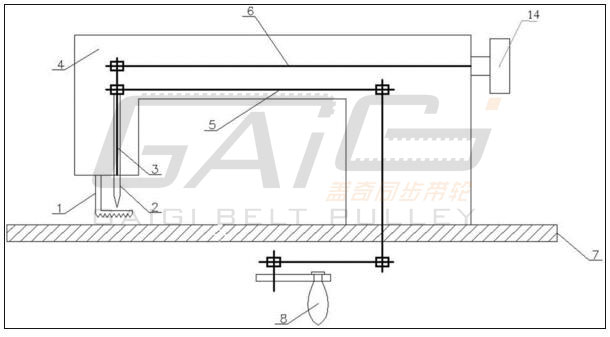
图1 手摇毛巾缝纫机示意图;
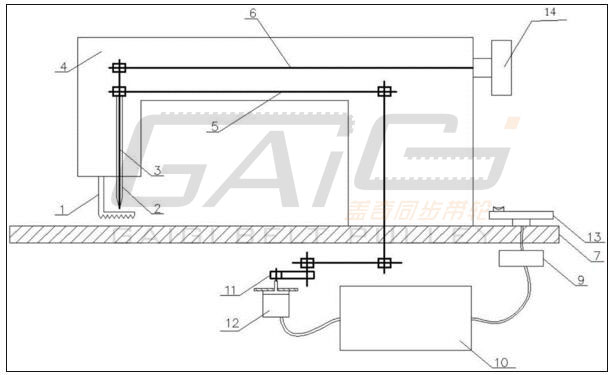
图2 增加电子助力系统后的手摇毛巾缝纫机示意图;
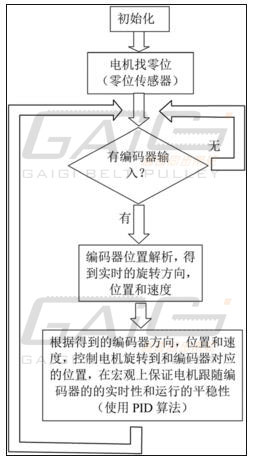
图3 软件控制流程图。
1.压脚 2.针嘴 3.机针 4.毛巾缝纫机 5.机针旋转跟踪传动轴 6.机针上下运动传动轴 7.工作台面 8.手摇跟踪手柄 9.旋转编码器 10.电子助力控制系统 11.传动同步带 12.电机 13.跟踪旋转盘 14上轮。
具体实施方式
下面结合附图对本发明进一步说明:手摇毛巾缝纫机跟踪轴电子助力控制装置,其包括压脚1、针嘴2、机针3、毛巾缝纫机4、机针旋转跟踪传动轴5、机针上下运动传动轴6、工作台面7、手摇跟踪手柄8、旋转编码器9、电子助力控制系统10、传动同步带11、电机12、跟踪旋转盘13和上轮14,所述的电机12通过传动同步带11驱动机针旋转跟踪传动轴5转动。所述的电子助力控制系统10通过旋转编码器9连接跟踪旋转盘13。
所述的跟踪旋转盘13位于工作台面7上方,对应连接在机针上下运动传动轴6的上轮14。
所述的电子助力控制系统10的中央处理器为PIC16F873。
手摇毛巾缝纫机跟踪轴电子助力控制装置,当电机12通电后,软件依据零位传感器,使电机12进行初始化,电机12带动传动同步带11,同时驱使机针旋转跟踪传动轴5旋转,机针旋转跟踪传动轴5同时带动机针3上下运动,使机针3停止在初始位置,利于缝料的放入。当缝料放入后,操作者按下启动按钮,电子助力控制系统 10通过跟踪旋转盘13得到信号,通过旋转编码器9进行编码. 电子助力控制系统10的中央处理器根据得到的编码器方向,位置和速度,控制电机12旋转到和编码器对应的位置,在宏观上保证电机跟随编码器的的实时性和运行的平稳性。随着机针旋转跟踪传动轴5的转动,机针上下运动传动轴6也同样做旋转运动;同时机针3在垂直方向上通过穿过针嘴2的缝制线对缝料进行缝合。压脚也在机针旋转跟踪传动轴5的作用下,对缝料进行压紧作业。

电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:浙江省宁波市鄞州区姜山镇蔡郎桥村姜南路39-2 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持 浙公网安备33021202003319号