产品搜索
当前位置:首页->一种检测电梯导轨多参数的攀爬机器人
一种检测电梯导轨多参数的攀爬机器人
【申请公布号: CN107628138A;申请权利人: 广东省特种设备检测研究院珠海检测院; 珠海市安粤科技有限公司;发明设计人: 戚政武; 梁敏健; 黄永坚; 陈英红; 苏宇航; 葛惠陟; 杨宁祥; 丛成龙; 刘登科;】
摘要:
本发明属于机器人技术领域,涉及一种检测电梯导轨多参数的攀爬机器人,包括:驱动机构、安全保护装置、承载平台和控制系统,所述驱动机构包括:电机、行星减速箱、同步带传动、顶磁轮、导向磁轮、驱动轮和夹紧机构;所述安全保护装置包括:防倾倒挂钩、导轨压板和支撑尾翼;所述控制系统包括:微型计算机系统、无线传输模块和编码器,实现电梯导轨的多参数检测并且可以在井道底坑或井道外实现无线控制和数据传输,并且本发明为不依赖于脚手架或轿厢的攀爬机器人,可以较好的解决目前电梯导轨检测检测方面存在的效率低、误差大、难以全面检测的难题,可提高检测效率和准确度,帮助发现隐患。
主权项:
一种检测电梯导轨多参数的攀爬机器人,包括:驱动机构、安全保护装置、承载平台和控制系统,其特征在于,其中,所述驱动机构用于驱动攀爬机器人在电梯导轨上运动;所述安全保护装置包括:防倾倒挂钩、导轨压板和支撑尾翼,所述防倾倒挂钩一端与攀爬机器人的顶部相连,另一端位于电梯导轨的凹槽内,当所述攀爬机器人倾翻时,使得所述防倾倒挂钩勾住所述凹槽;多个所述导轨压板设置于所述电梯导轨上,所述支撑尾翼与攀爬机器人的底部倾斜相连且位于所述导轨压板的上方,当所述攀爬机器人发生坠落时,使得所述支撑尾翼卡在距离所述攀爬机器人最近的导轨压板上;所述承载平台上设有多个参数检测模块,用于分别检测电梯导轨的垂直度、导轨轨距、导轨接头位置和导轨长度;所述控制系统包括:微型计算机系统、无线传输模块和编码器,其中,所述微型计算机系统与所述多个参数检测模块相连,所述无线传输模块与所述微型计算机系统相连,所述编码器分别与所述驱动机构和微型计算机系统相连。
要求:
1.一种检测电梯导轨多参数的攀爬机器人,包括:驱动机构、安全保护装置、承载平台和控制系统,其特征在于,其中,
所述驱动机构用于驱动攀爬机器人在电梯导轨上运动;
所述安全保护装置包括:防倾倒挂钩、导轨压板和支撑尾翼,所述防倾倒挂钩一端与攀爬机器人的顶部相连,另一端位于电梯导轨的凹槽内,当所述攀爬机器人倾翻时,使得所述防倾倒挂钩勾住所述凹槽;多个所述导轨压板设置于所述电梯导轨上,所述支撑尾翼与攀爬机器人的底部倾斜相连且位于所述导轨压板的上方,当所述攀爬机器人发生坠落时,使得所述支撑尾翼卡在距离所述攀爬机器人最近的导轨压板上;
所述承载平台上设有多个参数检测模块,用于分别检测电梯导轨的垂直度、导轨轨距、导轨接头位置和导轨长度;
所述控制系统包括:微型计算机系统、无线传输模块和编码器,其中,所述微型计算机系统与所述多个参数检测模块相连,所述无线传输模块与所述微型计算机系统相连,所述编码器分别与所述驱动机构和微型计算机系统相连。
2.根据权利要求1所述的攀爬机器人,其特征在于,所述驱动机构包括:电机、行星减速箱、同步带传动、顶磁轮、导向磁轮、驱动轮和夹紧机构,其中,所述同步带传动位于所述攀爬机器人的承载平台上,且依次与所述行星减速箱和电机相连。
3.根据权利要求2所述的攀爬机器人,其特征在于,两个所述顶磁轮分别位于所述攀爬机器人承载平台的上端和下端。
4.根据权利要求2所述的攀爬机器人,其特征在于,四个所述夹紧机构与所述攀爬机器人承载平台相连,且对称设置。
5.根据权利要求4所述的攀爬机器人,其特征在于,两个所述导向磁轮分别位于下方的两个所述夹紧机构上;两个所述驱动轮分别位于上方的两个所述夹紧机构上,且所述驱动轮与所述同步带传动相连。
6.根据权利要求5所述的攀爬机器人,其特征在于,所述夹紧机构包括:螺栓和弹簧,通过调节所述螺栓改变所述弹簧的压缩量,进而调整所述驱动轮和导向磁轮与电梯导轨的夹紧力。
7.根据权利要求3所述的攀爬机器人,其特征在于,所述顶磁轮包括:磁轮中心磁块、不锈钢圆环和铜圆环,其中,所述不锈钢圆环和铜圆环交替叠加设置形成圆环体,所述磁轮中心磁块设置于所述圆环体中。
8.根据权利要求2所述的攀爬机器人,其特征在于,所述编码器与所述电机相连。
9.根据权利要求1所述的攀爬机器人,其特征在于,所述微型计算机系统为单片机系统。
10.根据权利要求1所述的攀爬机器人,其特征在于,所述控制系统位于所述攀爬机器人的承载平台上。
一种检测电梯导轨多参数的攀爬机器人
技术领域
本发明属于机器人技术领域,可用于搭载多种电梯导轨参数检测模块实现电梯导轨的多参数检测的承载平台,具体涉及一种检测电梯导轨多参数的攀爬机器人。
背景技术
电梯导轨作为电梯重要组成部分,与列车导轨性质类似,是影响安全性和舒适性的重要因素。电梯导轨具有可靠性高、刚性强、廉价等特点,现代电梯常用T型导轨。电梯导轨对平面要求很高,必须保证平面光滑性(电梯速度越高,要求越苛刻)才能保证轿厢平稳运行。但电梯导轨在制造和安装过程中难免会带来尺寸偏差,若偏差超过规定范围可能会对电梯正常运行带来安全威胁,甚至引发安全事故。因此,在电梯导轨安装后电梯投入使用前,或日后的维护检查中对导轨进行检测是十分必要的。
影响电梯安全运行的导轨偏差因素主要有导轨垂直度偏差,轨距偏差。导轨垂直度偏差过大会造成电梯运行摆动颠波,导轨顶面间距偏差过大会引起轿厢水平晃动,过小会使轿厢垂直振动。TSG7001-2009《电梯监督检验和定期检验规则——曳引与强制驱动电梯》要求每列导轨工作面每5m铅垂线测量值间最大偏差:轿厢导轨和设安全钳的T型对重导轨不大于1.2mm,不设安全钳的T型对重导轨不大于2mm;两列导轨顶面距离(轨距)偏差:轿厢导轨为0~+2mm,对重导轨为0~+3mm;每根导轨至少有两个导轨支架,两个支架之间距离一般不超过2.5m(超过2.5m,要有计算依据)。
长期以来对电梯导轨垂直度的检测一直采用吊垂线的方法,这种方法费时费力,而且每测量一个位置都要重新固定基准,测量效率低,误差很大。尤其是电梯投入使用以后的维护阶段,由于没有脚手架,更加无法操作。近年来,虽然出现了激光铅垂线代替传统拉线,但是需要每一个测量点安装接受光靶,然后人工读数,没有脚手架使得作业很不安全,效率也低。针对导轨顶面距离的测量,目前检测人员常用卷尺或激光测距仪进行多点测量,并人工一一记录,效率低,劳动强度大。目前针对导轨支架设置及距离检测方法是检测人员在站在轿顶拉卷尺测量。假设一台高层电梯(提升高度超100米)需要对导轨进行垂直度、轨距、支架距离进行检测,如采用人工检测将是十分费时费力,且不能做到精确测量。
发明内容
针对现有技术的不足,本发明提出了一种检测电梯导轨多参数的攀爬机器人,可用于搭载电梯导轨垂直度检测模块、导轨轨距检测模块等多种电梯导轨参数检测模块,从而实现电梯导轨的多参数检测并且可以在井道底坑或井道外实现无线控制和数据传输。
为解决上述技术问题,本发明采取的技术方案为:
本发明提出了一种检测电梯导轨多参数的攀爬机器人,包括:驱动机构、安全保护装置、承载平台和控制系统,其特征在于,其中,所述驱动机构用于驱动攀爬机器人在电梯导轨上运动;所述安全保护装置包括:防倾倒挂钩、导轨压板和支撑尾翼,所述防倾倒挂钩一端与攀爬机器人的顶部相连,另一端位于电梯导轨的凹槽内,当所述攀爬机器人倾翻时,使得所述防倾倒挂钩勾住所述凹槽;多个所述导轨压板设置于所述电梯导轨上,所述支撑尾翼与攀爬机器人的底部倾斜相连且位于所述导轨压板的上方,当所述攀爬机器人发生坠落时,使得所述支撑尾翼卡在距离所述攀爬机器人最近的导轨压板上;所述承载平台上设有多个参数检测模块,用于分别检测电梯导轨的垂直度、导轨轨距、导轨接头位置和导轨长度;所述控制系统包括:微型计算机系统、无线传输模块和编码器,其中,所述微型计算机系统与所述多个参数检测模块相连,所述无线传输模块与所述微型计算机系统相连,所述编码器分别与所述驱动机构和微型计算机系统相连。
进一步的,所述驱动机构包括:电机、行星减速箱、同步带传动、顶磁轮、导向磁轮、驱动轮和夹紧机构,其中,所述同步带传动位于所述攀爬机器人的承载平台上,且依次与所述行星减速箱和电机相连。
进一步的,两个所述顶磁轮分别位于所述攀爬机器人承载平台的上端和下端。
进一步的,四个所述夹紧机构与所述攀爬机器人承载平台相连,且对称设置。
进一步的,两个所述导向磁轮分别位于下方的两个所述夹紧机构上;两个所述驱动轮分别位于上方的两个所述夹紧机构上,且所述驱动轮与所述同步带传动相连。
进一步的,所述夹紧机构包括:螺栓和弹簧,通过调节所述螺栓改变所述弹簧的压缩量,进而调整所述驱动轮和导向磁轮与电梯导轨的夹紧力。
进一步的,所述顶磁轮包括:磁轮中心磁块、不锈钢圆环和铜圆环,其中,所述不锈钢圆环和铜圆环交替叠加设置形成圆环体,所述磁轮中心磁块设置于所述圆环体中。
进一步的,所述编码器与所述电机相连。
进一步的,所述微型计算机系统为单片机系统。
进一步的,所述控制系统位于所述攀爬机器人的承载平台上。
本发明的有益效果为:本发明所述的攀爬机器人,是一种可用于搭载多种电梯导轨参数检测模块,从而实现电梯导轨的多参数检测并且可以在井道底坑或井道外实现无线控制和数据传输,并且本发明为不依赖于脚手架或轿厢的攀爬机器人,可以较好的解决目前电梯导轨检测检测方面存在的效率低、误差大、难以全面检测的难题,可提高检测效率和准确度,帮助发现隐患。
附图说明
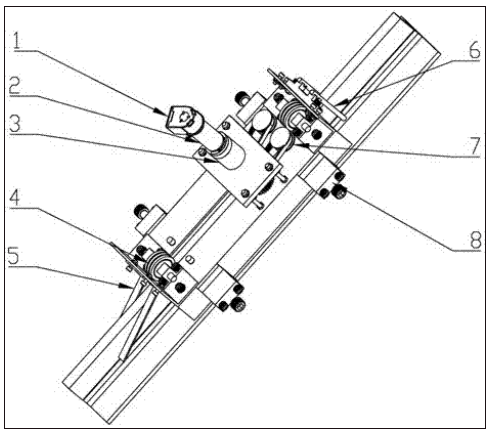
图1是本发明攀爬机器人的轴测图。
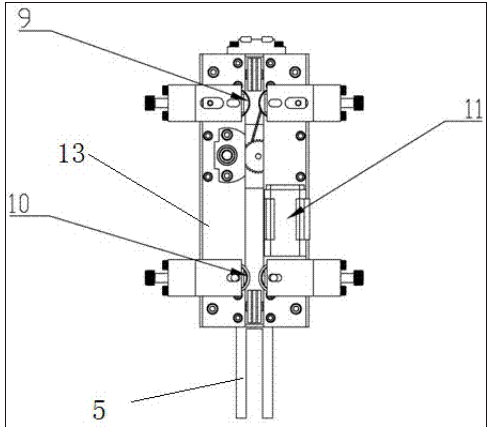
图2是本发明攀爬机器人的底部视图。
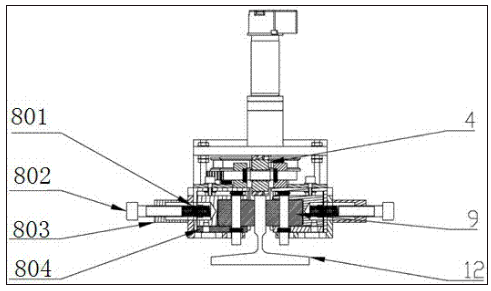
图3是本发明攀爬机器人的剖面图。
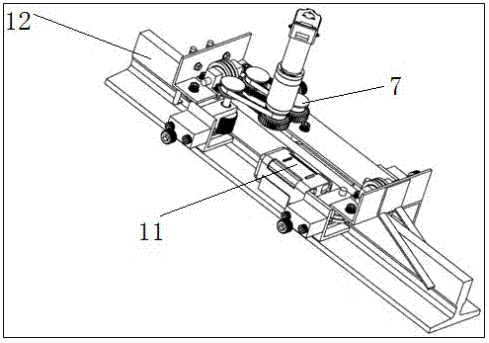
图4是为图1的内部结构的侧视图。
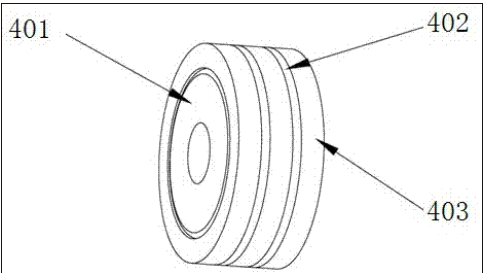
图5是顶磁轮的结构图。
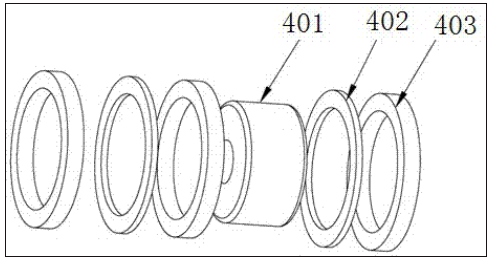
图6是顶磁轮的结构分解图。
其中,编码器1、电机2、行星减速箱3、顶磁轮4、磁轮中心磁块401、不锈钢圆环402、铜圆环403、支撑尾翼5、防倾倒挂钩6、同步带传动7、夹紧机构8、弹簧801、螺栓802、外壳一803、外壳二804、驱动轮9、导向磁轮10、控制系统11、电梯导轨12、承载平台13。
具体实施方式
为了使本领域技术人员更好地理解本发明的技术方案,下面结合具体实施例对本发明作进一步的详细说明。下面描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。实施例中未注明具体技术或条件的,按照本领域内的文献所描述的技术或条件或者按照产品说明书进行。
本发明提出了一种检测电梯导轨多参数的攀爬机器人,包括:驱动机构、安全保护装置、承载平台和控制系统;其中,根据本发明的一些实施例,本发明所述微型计算机系统为STM32单片机系统,图2是本发明攀爬机器人的底部视图,图4是为图1的内部结构的侧视图,参照图2和4所示,所述控制系统11位于所述攀爬机器人的承载平台13上。
根据本发明的实施例,图1是本发明攀爬机器人的轴测图,参照图1和图4所示,所述驱动机构包括:电机2、行星减速箱3、同步带传动7、两个顶磁轮4、两个导向磁轮10、两个驱动轮9和四个夹紧机构8,其中,所述同步带传动位于所述攀爬机器人的承载平台13上,所述电机的上端与所述编码器相连,所述电机的下端与所述行星减速箱相连,所述行星减速箱与所述同步带传动相连;两个所述顶磁轮分别位于所述攀爬机器人承载平台的上端和下端;四个所述夹紧机构与所述攀爬机器人承载平台相连,且在所述攀爬机器人承载平台的上部和下部各设有左右对称的两个所述夹紧机构,用于分别安装所述两个导向磁轮和两个驱动轮。
根据本发明的一些实施例,参照图1、2和4所示,两个所述导向磁轮分别位于下方的两个所述夹紧机构上;两个所述驱动轮分别位于上方的两个所述夹紧机构上,且所述驱动轮与所述同步带传动相连,通过所述电机、行星减速箱和同步带传送将动力传递到所述驱动轮,驱动所述攀爬机器人在电梯导轨上运行。
根据本发明的一些实施例,图3是本发明攀爬机器人的剖面图,参照图3所示,所述夹紧机构8包括:螺栓801、弹簧802、外壳一803和外壳二804,所述弹簧位于所述外壳一的内部,所述螺栓的一端伸入所述外壳一的内部与所述弹簧相连,另一端位于所述外壳一的外部,所述弹簧的另一端靠近所述驱动轮和导向磁轮设置,所述外壳一与所述攀爬机器人的承载平台相连,所述外壳二与所述外壳一相连,并可以沿所述螺栓的轴向移动,所述驱动轮和导向磁轮均设置于所述外壳二上,通过调整螺栓和弹簧向所述外壳二、所述驱动轮和导向磁轮施加压力,通过调整螺栓的松紧度改变弹簧的压缩量,从而改变对对驱动轮和导向磁轮的压力,进而改变所述两个导向磁轮之间的距离和所述两个驱动轮之间的距离,同时改变所述导向磁轮和驱动轮对电梯导轨12的夹紧力,使得采用所述夹紧机构的本发明所述的攀爬机器人能够在不同规格的导轨上使用。
根据本发明的一些实施例,图5是顶磁轮的结构图,图6是顶磁轮的结构分解图,参照图5和6所示,所述顶磁轮4包括:磁轮中心磁块401、不锈钢圆环402和铜圆环403,其中,所述不锈钢圆环和铜圆环交替叠加设置形成圆环体,所述磁轮中心磁块设置于所述圆环体中;其中所述铜圆环的厚度大于所述不锈钢圆环的厚度,降低制作成本,且铜圆环有良好的导磁性能,可以确保磁轮整体磁性,同时提高磁轮圆柱度、保护磁轮中心磁块并方便对磁轮表面进行加工,本发明所述的导向磁轮也可以采取所述顶磁轮,所述驱动轮表面滚花,用于增大摩擦力。
根据本发明的一些实施例,本发明所述两个顶磁轮、两个导向磁轮和两个驱动轮,用于确保攀爬机器人紧密依附在导轨上,同时攀爬机器人的运动轨迹能充分、真实反映导轨上的参数信息。
根据本发明的实施例,参照图1和4所示,所述安全保护装置包括:防倾倒挂钩、导轨压板和支撑尾翼,所述防倾倒挂钩一端与攀爬机器人的顶部相连,另一端位于电梯导轨的凹槽内,当所述攀爬机器人磁轮失磁倾翻时,所述防倾倒挂钩勾住所述凹槽,防止攀爬机器人继续倾翻;多个所述导轨压板设置于所述电梯导轨上,所述支撑尾翼与攀爬机器人的底部倾斜相连且位于所述导轨压板的上方,当所述攀爬机器人发生磁轮失磁坠落时,所述支撑尾翼卡在距离所述攀爬机器人最近的导轨压板上,防止攀爬机器人继续下坠,该安全保护装置有效地防止了攀爬机器人的倾覆坠落,避免了工作人员的伤亡,保证工作安全。
根据本发明的实施例,本发明所述承载平台上设有多个参数检测模块,优选为:垂直度检测模块、导轨轨距检测模块、导轨接头位置检测模块以及导轨长度检测模块,分别检测电梯导轨的垂直度、导轨轨距、导轨接头位置和导轨长度;根据本发明的一些实施例,当需要检测电梯轨道的其他参数时,也可将其相对应的检测模块安装在本发明的承载平台上,通过本发明所述的攀爬机器人进行检测。
根据本发明的实施例,所述控制系统包括:STM32单片机系统、无线传输模块、编码器和便携式计算机,其中,所述STM32单片机系统与所述垂直度检测模块、导轨轨距检测模块、导轨接头位置检测模块以及导轨长度检测模块相连,所述无线传输模块与所述STM32单片机系统相连,所述编码器分别与所述电机和STM32单片机系统相连,所述便携式计算机通过无线传输模块与所述STM32单片机系统实现数据的实时交互。
根据本发明的一些实施例,所述编码器将检测到的信号反馈给STM32单片机系统,通过换算得出所述攀爬机器人的攀爬距离,所述垂直度检测模块、导轨轨距检测模块、导轨接头位置检测模块以及导轨长度检测模块将检测的相应参数传输给所述STM32单片机系统进行处理后,所述STM32单片机系统将所有检测参数实时传输到位于井道外或井道底坑的便携式计算机上,可以及时发现电梯轨道的隐患。
根据本发明的另一个实施例,本发明所述的攀爬机器人的尾部还可安装激光测距仪,实现攀爬机器人在电梯导轨上的定位。
根据本发明的一些实施例,本发明所述攀爬机器人的具体操作步骤包括以下五个步骤。
第一步,将驱动轮和导向磁轮的四个夹紧机构上的螺栓松开,以增大驱动轮和导向磁轮的轮距,便于将攀爬机器人安放在电梯导轨上。
第二步,将电梯导轨攀爬机器人防倾倒挂钩朝上,支撑尾翼朝下安放在导轨上,并对四个夹紧机构上的螺栓逐个上紧,夹紧机构通过内部的弹簧向驱动轮和导向磁轮施加压力,从而增大驱动轮和导向磁轮对导轨的摩擦力,上紧螺栓直至攀爬机器人不因自重而下落、驱动轮在攀爬过程中不打滑为止;在夹紧机构和磁轮的共同作用下,攀爬机器人紧贴导轨,攀爬机器人的运动轨迹能充分、真实反映导轨上的参数信息。
第三步,根据导轨的规格尺寸调整防倾倒挂钩和支撑尾翼,并模拟攀爬机器人坠落过程,确保防倾倒挂钩和支撑尾翼有效。
第四步,开启攀爬机器人和便携式电脑,检测无线传输连接是否成功,然后在井道底坑或井道外用便携式电脑对攀爬机器人进行无线控制,攀爬机器人上的电机通过行星减速箱、同步带传动将动力传输到驱动轮,通过便携式电脑控制电机正反转,实现往上爬或往下降;攀爬机器人可以通过无线传输模块将机器人位置以及其他检测数据实时传送到便携式电脑上,并在便携式电脑人机交互界面实时显示。
第五步,攀爬机器人完成检测工作,下降到起始位置,关闭攀爬机器人电源,将驱动轮和导向磁轮的四个夹紧机构上的螺栓松开,将攀爬机器人从导轨上卸下,将机器人及便携式电脑摆放好,整个检测过程完成。
发明人发现,根据本发明所述的攀爬机器人,是一种可用于搭载多种电梯导轨参数检测模块,从而实现电梯导轨的多参数检测并且可以在井道底坑或井道外实现无线控制和数据传输,并且本发明为不依赖于脚手架或轿厢的攀爬机器人,可以较好的解决目前电梯导轨检测检测方面存在的效率低、误差大、难以全面检测的难题,可提高检测效率和准确度,帮助发现隐患。
在本发明的描述中,需要理解的是,术语“上”、“下”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
在本发明中,除非另有明确的规定和限定,术语“相连”、“连接”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、 或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型,同时,对于本领域的一般技术人员,依据本申请的思想,在具体实施方式及应用范围上均会有改变之处。

Copyright © 宁波鄞州盖奇同步带轮有限公司 2007-2022 All Rights Reserved.
电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:浙江省宁波市鄞州区姜山镇蔡郎桥村姜南路39-2 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持 浙公网安备33021202003319号
电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:浙江省宁波市鄞州区姜山镇蔡郎桥村姜南路39-2 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持 浙公网安备33021202003319号