产品搜索
当前位置:首页->一种同步带XY轴机械手臂
一种同步带XY轴机械手臂
【申请公布号:CN107856027A;申请权利人:无锡特恒科技有限公司;发明设计人:吕森华; 顾晓春; 翁亚运;】
摘要:
本发明涉及一种同步带XY轴机械手臂,属于工件移动技术领域。其包括安装基座、底板、同步带平移机构、丝杆平移机构和气动夹爪;所述安装基座上固定底板,底板上设置同步带平移机构,同步带平移机构与丝杆平移机构配合连接,丝杆平移机构下端连接气动夹爪。本发明由同步带平移机构带动气爪X轴移动,丝杆平移机构带动气爪Y轴移动,气爪抓取,达到平移搬运的目的,其结构简单,实用性强,省时省力,可应用于多种场合。
主权项:
一种同步带XY轴机械手臂,其特征是:包括安装基座(1)、底板(2)、同步带平移机构(3)、丝杆平移机构(4)和气动夹爪(5);所述安装基座(1)上固定底板(2),底板(2)上设置同步带平移机构(3),同步带平移机构(3)与丝杆平移机构(4)配合连接,丝杆平移机构(4)下端连接气动夹爪(5)。
要求:
1.一种同步带XY轴机械手臂,其特征是:包括安装基座(1)、底板(2)、同步带平移机构(3)、丝杆平移机构(4)和气动夹爪(5);所述安装基座(1)上固定底板(2),底板(2)上设置同步带平移机构(3),同步带平移机构(3)与丝杆平移机构(4)配合连接,丝杆平移机构(4)下端连接气动夹爪(5)。
2.如权利要求1所述同步带XY轴机械手臂,其特征是:所述同步带平移机构(3)包括第一导轨(31)、第二导轨(32)、第一同步带轮(33)、第二同步带轮(34)、同步带(35)、第一滑块(36)、第二滑块(37)和驱动滑块(38);
所述底板(2)上方和下方设有第一导轨(31)和第二导轨(32),底板(2)两侧设有第一同步带轮(33)和第二同步带轮(34);所述同步带(35)设置于第一同步带轮(33)和第二同步带轮(34)上;
所述第一导轨(31)上设有第一滑块(36),第二导轨(32)上设有第二滑块(37),第一滑块(36)与驱动滑块(38)连接,驱动滑块(38)与同步带(35)连接。
3.如权利要求1所述同步带XY轴机械手臂,其特征是:所述丝杆平移机构(4)包括平移底板(41)、电机(42)、丝杆(43)、轴承(44)、第三导轨(45)、第四导轨(46)和滑台(47);
所述平移底板(41)两侧分别设有第三导轨(45)和第四导轨(46),平移底板(41)上端设有电机(42),电机(42)通过气缸固定板固定于平移底板(41)上方;所述电机(42)的驱动轴与丝杆(43)连接,丝杆(43)上端与轴承(44)配合连接,轴承(44)固定于平移底板(41)上;所述滑台(47)两端与第三导轨(45)和第四导轨(46)滑动连接,滑台(47)中部与丝杆(43)螺纹连接;所述滑台(47)下方连接气动夹爪(5)。
4.如权利要求3所述同步带XY轴机械手臂,其特征是:所述滑台(47)中部设有螺纹孔,丝杆(43)与滑台(47)上的螺纹孔螺纹连接。
5.如权利要求2或3所述同步带XY轴机械手臂,其特征是:所述第一导轨(31)和第二导轨(32)分别与平移底板(41)固定连接。
6.如权利要求2所述同步带XY轴机械手臂,其特征是:还包括同步带轮电机(6),同步带轮电机(6)与第二同步带轮(34)连接,通过同步带轮电机(6)驱动同步带(35),从而驱动丝杆平移机构(4)。
一种同步带XY轴机械手臂
技术领域
本发明涉及一种同步带XY轴机械手臂,具体一种通过同步带和丝杆结合的两轴机械手臂,属于工件移动技术领域。
背景技术
机械手臂是机械人技术领域中得到最广泛实际应用的自动化机械装置,在工业制造、医学治疗、娱乐服务、军事、半导体制造以及太空探索等领域都能见到它的身影。尽管它们的形态各有不同,但它们都有一个共同的特点,就是能够接受指令,精确地定位到三维(或二维)空间上的某一点进行作业。
对于工业应用来说,有时并不需要机械手臂具有完整的六个自由度,而只需其中的一个或几个自由度。直角坐标系机械手臂可以由单轴机械手臂组合而成。单轴机械手臂作为一个组件在工业中应用广泛。单轴机械手臂的组件化大大降低了工业设计的成本,因专业制造商拥有良好的质量保证和批量生产的优势,使用组件比自行设计机械手臂更具优势。常见的直交机械手组合有悬臂式,龙门式,直立式,横立式等样式。
但对于某些平移搬运来说,单轴机械手臂仍然力有未逮,而复杂的多自由度机械手臂结构复杂,造价昂贵,设备沉重以及维修难等缺点。对于存在其造价昂贵,原理结构复杂,对环境要求高,伸缩夹取效果差等问题,急需开发一种新的能够广泛应用的机械手臂。
发明内容
本发明的目的在于克服上述不足之处,提供一种同步带XY轴机械手臂,其由同步带平移机构带动气动夹爪沿X轴移动,丝杆平移机构带动气动夹爪沿Y轴移动,气动夹爪抓取,达到平移搬运的目的。
按照本发明提供的技术方案,一种同步带XY轴机械手臂,包括安装基座、底板、同步带平移机构、丝杆平移机构和气动夹爪;所述安装基座上固定底板,底板上设置同步带平移机构,同步带平移机构与丝杆平移机构配合连接,丝杆平移机构下端连接气动夹爪。
所述同步带平移机构包括第一导轨、第二导轨、第一同步带轮、第二同步带轮、同步带、第一滑块、第二滑块和驱动滑块;
所述底板上方和下方设有第一导轨和第二导轨,底板两侧设有第一同步带轮和第二同步带轮;所述同步带设置于第一同步带轮和第二同步带轮上;
所述第一导轨上设有第一滑块,第二导轨上设有第二滑块,第一滑块与驱动滑块连接,驱动滑块与同步带连接。
所述丝杆平移机构包括平移底板、电机、丝杆、轴承、第三导轨、第四导轨和滑台;所述平移底板两侧分别设有第三导轨和第四导轨,平移底板上端设有电机,电机通过气缸固定板固定于平移底板上方;所述电机的驱动轴与丝杆连接,丝杆上端与轴承配合连接,轴承固定与平移底板上;所述滑台两端与第三导轨和第四导轨滑动连接,滑台中部与丝杆螺纹连接;所述滑台下方连接气动夹爪。
所述滑台中部设有螺纹孔,丝杆与滑台上的螺纹孔螺纹连接。
所述第一导轨和第二导轨分别与平移底板固定连接。
还包括同步带轮电机,同步带轮电机与第二同步带轮连接,通过同步带轮电机驱动同步带,从而驱动丝杆平移机构。
本发明的有益效果:本发明由同步带平移机构带动气动夹爪沿X轴移动,丝杆平移机构带动气动夹爪沿Y轴移动,气动夹爪进行抓取,达到平移搬运的目的,其结构简单,实用性强,省时省力,可应用于多种场合。
附图说明
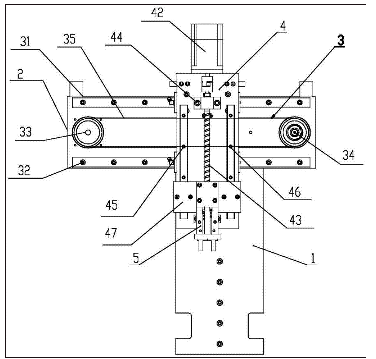
图1是本发明结构主视图。
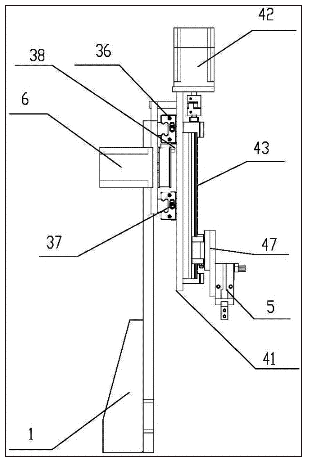
图2是本发明结构侧视图。
附图标记说明:1、安装基座;2、底板;3、同步带平移机构;31、第一导轨;32、第二导轨;33、第一同步带轮;34、第二同步带轮;35、同步带;36、第一滑块;37、第二滑块;38、驱动滑块;4、丝杆平移机构;41、平移底板;42、电机;43、丝杆;44、轴承;45、第三导轨;46、第四导轨;47、滑台;5、气动夹爪;6、同步带轮电机。
具体实施方式
如图1-2所示:一种同步带XY轴机械手臂,包括安装基座1、底板2、同步带平移机构3、丝杆平移机构4和气动夹爪5;所述安装基座1上固定底板2,底板2上设置同步带平移机构3,同步带平移机构3与丝杆平移机构4配合连接,丝杆平移机构4下端连接气动夹爪5。
所述同步带平移机构3包括第一导轨31、第二导轨32、第一同步带轮33、第二同步带轮34、同步带35、第一滑块36、第二滑块37和驱动滑块38;
所述底板2上方和下方设有第一导轨31和第二导轨32,底板2两侧设有第一同步带轮33和第二同步带轮34;所述同步带35设置于第一同步带轮33和第二同步带轮34上;
所述第一导轨31上设有第一滑块36,第二导轨32上设有第二滑块37,第一滑块36与驱动滑块38连接,驱动滑块38与同步带35连接。
所述丝杆平移机构4包括平移底板41、电机42、丝杆43、轴承44、第三导轨45、第四导轨46和滑台47;
所述平移底板41两侧分别设有第三导轨45和第四导轨46,平移底板41上端设有电机42,电机42通过气缸固定板固定于平移底板41上方;所述电机42的驱动轴与丝杆43连接,丝杆43上端与轴承44配合连接,轴承44固定与平移底板41上;所述滑台47两端与第三导轨45和第四导轨46滑动连接,滑台47中部与丝杆43螺纹连接;所述滑台47下方连接气动夹爪5。
所述滑台47中部设有螺纹孔,丝杆43与滑台47上的螺纹孔螺纹连接。
所述第一导轨31和第二导轨32分别与平移底板41固定连接。
还包括同步带轮电机6,同步带轮电机6与第二同步带轮34连接,通过同步带轮电机6驱动同步带35,从而驱动丝杆平移机构4。
本发明工作时,首先通过同步带轮电机6驱动第二同步带轮34,通过同步带35带动第一同步带轮33,进而带动丝杆平移机构4沿着第一导轨31和第二导轨32做水平方向的移动;继续通过电机42驱动丝杆43,使得与丝杆43螺纹连接的滑台47沿着第三导轨45和第四导轨46做垂直方向上的移动,带动气动夹爪5到达所需的位置。
本发明由一组同步带平移机构,一组丝杆平移机构,一个气动夹爪组成,由同步带平移机构带动气动夹爪沿X轴移动,丝杆平移机构带动气动夹爪沿Y轴移动,气动夹爪进行抓取,从而达到平移搬运的目的。
本发明结构简单,实用性强,省时省力,可应用于多种场合。

Copyright © 宁波鄞州盖奇同步带轮有限公司 2007-2022 All Rights Reserved.
电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:浙江省宁波市鄞州区姜山镇蔡郎桥村姜南路39-2 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持 浙公网安备33021202003319号
电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:浙江省宁波市鄞州区姜山镇蔡郎桥村姜南路39-2 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持 浙公网安备33021202003319号