产品搜索
当前位置:首页->一种机器人升降装置
一种机器人升降装置
【申请公布号:CN107953313A;申请权利人:广州松兴电气股份有限公司;发明设计人:朱方勇; 邓志兵; 颜剑航; 张东桥; 何彪;】
摘要:
一种机器人升降装置,包括基座、丝杆螺母、电机、主动同步带轮、同步带、从动同步带轮、电机安装座、直线滑轨、举升平台、位置检测开关。所述举升部分为被升降物支撑平台,举升部分支撑是通过丝杆轴支撑与直线滑轨固定相连;而另一端则通过同步带、同步轮传递与基座部分电机侧传输动力。电机通过伺服控制器编码控制电机转动,驱动升降装置通过同步带、同步轮传递运动,使举升部分通过滑块滑动位移到达制定精准工作位置。从工作原理表明,升降装置在升降过程中,停止位置是通过伺服控器编码控制电机转动,从而使举升部分通过一定位移量,从而解决升降定位过程中,升降位置及升降点位之间位移关系出现的各种问题,得到精准的升降位置。
主权项:
一种机器人升降装置,包括基座、丝杆螺母、电机、主动同步带轮、同步带、从动同步带轮、电机安装座、直线滑轨、举升平台、位置检测开关,其特征是所述基座的内侧固定连接丝杆、丝杆上下采用轴承组合进行支撑与定位;电机通过电机安装座固定于基座,输出轴通过主动同步轮、同步带结构连接到丝杆末端,电机通过同步带结构驱动丝杆使丝杆螺母上升;而基座的外侧安装了直线滑轨,支撑平台通过固定在滑块上与直线滑轨相连,支撑平台延伸一个法兰与丝杆螺母相连,与丝杆螺母同步上下运动;在升降动作时,电机通过伺服控制器编码控制电机转动,驱动升降装置通过同步带、同步轮传递运动,使举升部分通过滑块滑动位移精准到达工作位置。
要求:
1.一种机器人升降装置,包括基座、丝杆螺母、电机、主动同步带轮、同步带、从动同步带轮、电机安装座、直线滑轨、举升平台、位置检测开关,其特征是所述基座的内侧固定连接丝杆、丝杆上下采用轴承组合进行支撑与定位;电机通过电机安装座固定于基座,输出轴通过主动同步轮、同步带结构连接到丝杆末端,电机通过同步带结构驱动丝杆使丝杆螺母上升;而基座的外侧安装了直线滑轨,支撑平台通过固定在滑块上与直线滑轨相连,支撑平台延伸一个法兰与丝杆螺母相连,与丝杆螺母同步上下运动;在升降动作时,电机通过伺服控制器编码控制电机转动,驱动升降装置通过同步带、同步轮传递运动,使举升部分通过滑块滑动位移精准到达工作位置。
2.根据权利要求1所述的机器人升降装置,其特征是所述基座动力部分电机通过同步带传动到达传动部分,升降动作,电机通过伺服控制器编码控制电机转动,驱动升降装置通过同步带、同步轮传递运动,使举升部分通过滑块滑动位移到达制定精准工作位置。
3.根据权利要求1所述的机器人升降装置,其特征是所述基座的丝杆和滑轨都是具有高精度的组合件,伺服电机亦能精确进行定位,通过统计电机驱动器发出的脉冲值计算行走的距离,精准到达所需工作位置。
4.根据权利要求1所述的机器人升降装置,其特征是所述基座的丝杆安装位置附近安装有3个检测开关,当丝杆螺母运动时,检测开关检测到感应杆,得知升降台的初始位置以及极限位置,通过检测信号使设备在安全范围内运行。
5.根据权利要求1所述的机器人升降装置,其特征是所诉基座与举升平台之间安装有拖链,举升平台上的管线可以通过拖链传送到基座与控制部分相连,当举升平台上下运动时,举升平台上的管线在拖链的保护下随行运动。
6.根据权利要求1所述的机器人升降装置,其特征是:所述为同步带传动结构形式,亦可采用齿轮传动结构形式,相关改动的结构零件为主动同步轮变更为主动端齿轮,从动同步轮变更为从动齿轮,从而把其中同步带撤销。
7.根据权利要求1所述的机器人升降装置,其特征是:所述为轴承固定座动结构形式,其中使用为角接触轴承组合,亦可采用深沟球轴承代替角接触轴承。
8.根据权利要求1所述的机器人升降装置,其特征是:所述为电机输出形式,亦可采用伺服电机或者步进电机代替。
9.根据权利要求1所述的机器人升降装置,其特征是:所述上下限位检测形式为检测开关检测,亦可采行程开关代替。
一种机器人升降装置
技术领域
本发明适用于轨道车辆检修统技术领域,涉及动车组、地铁、机车等轨道车辆的检修,具体是一种机器人升降装置。
背景技术
机器人升降装置是轨道车辆检修小车主要部件之一。升降装置升降搭载物包括但不限于:机器人、视觉系统、测量系统等检查测量工具。轨道车辆检修小车是视觉机器人安装在专用检测小车上,能够根据应用平台通过无线网络发送的指令自动完成库内检修作业,并实时发回检修进度及设备状态;而轨道车辆检修小车上进行图像采集的工具是采用机器人搭载视觉测量,通过专用小车行走、多点位移动工作;机器人轨迹精准重复定位精度可靠。但是由于轨道车辆的车轮在行驶过程中有一定磨损量,造成被检测物多次检测的高低不同,所以需要一款能够自动补偿由车轮磨损带来的检测偏差的升降台。
发明内容
本发明的目的在于提供一种机器人升降装置,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:
一种机器人升降装置,包括基座、丝杆螺母、电机、主动同步带轮、同步带、从动同步带轮、电机安装座、直线滑轨、举升平台、位置检测开关。所述基座的内侧固定连接丝杆、丝杆上下采用轴承组合进行支撑与定位;电机通过电机安装座固定于基座,输出轴通过主动同步轮、同步带结构连接到丝杆末端,电机通过同步带结构驱动丝杆使丝杆螺母上升;而基座的外侧安装了直线滑轨,支撑平台通过固定在滑块上与直线滑轨相连,支撑平台延伸一个法兰与丝杆螺母相连,与丝杆螺母同步上下运动;在升降动作时,电机通过伺服控制器编码控制电机转动,驱动升降装置通过同步带、同步轮传递运动,使举升部分通过滑块滑动位移精准到达工作位置。
所述基座动力部分电机通过同步带传动到达传动部分,升降动作,电机通过伺服控制器编码控制电机转动,驱动升降装置通过同步带、同步轮传递运动,使举升部分通过滑块滑动位移到达制定精准工作位置。
所述基座的丝杆和滑轨都是具有高精度的组合件,伺服电机亦能精确进行定位,通过统计电机驱动器发出的脉冲值计算行走的距离,精准到达所需工作位置。
所述基座的丝杆安装位置附近安装有3个检测开关,当丝杆螺母运动时,检测开关检测到感应杆,得知升降台的初始位置以及极限位置,通过检测信号使设备在安全范围内运行。
所诉基座与举升平台之间安装有拖链,举升平台上的管线可以通过拖链传送到基座与控制部分相连,当举升平台上下运动时,举升平台上的管线在拖链的保护下随行运动。
作为本发明再进一步的方案:所述为同步带传动结构形式,亦可采用齿轮传动结构形式,相关改动的结构零件为主动同步轮变更为主动端齿轮,从动同步轮变更为从动齿轮,从而把其中同步带撤销。
作为本发明再进一步的方案:所述为轴承固定座动结构形式,其中使用为角接触轴承组合,亦可采用深沟球轴承代替角接触轴承。
作为本发明再进一步的方案:所述为电机输出形式,亦可采用伺服电机或者步进电机代替。
作为本发明再进一步的方案:所述上下限位检测形式为检测开关检测,亦可采行程开关代替。
与现有技术相比,本发明的有益效果是:从工作原理表明,升降装置是电机通过伺服控制器编码控制电机转动,驱动升降装置通过同步带、同步轮传递运动,使举升部分通过滑块滑动位移到达制定精准工作位置。从而解决升降定位点单一,或者多点位之间位置关系存在偏差,很难对数据采集或对比提供有力依据等问题。升降平台的管线通过管线导向槽和拖链的保护,当举升平台上下运动时,举升平台上的管线在拖链的保护下随行运动。以及因此本发明的通过改进结构,有效地克服已有技术之不足。
本发明结构简单,采用同步轮同步带传动,以及丝杆传动方法,通过通过伺服控制器编码控制电机转动,使举升平台位移到达多个精准工作位置,从而解决实际运用中需要实现多点位数据采集或对比分析提供更准确依据。
附图说明
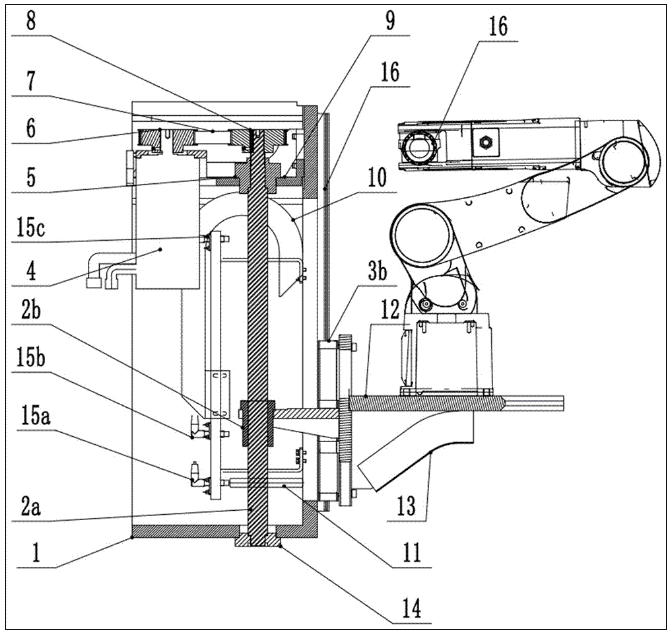
图1为本发明的结构示意图;
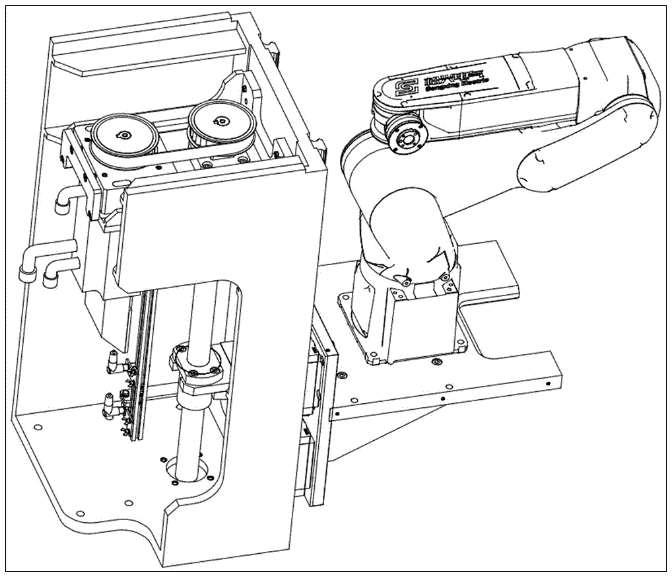
图2为本发明的立体结构示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅附图1~2,本发明实施例中,一种升降装置,包括图示:1基座,2a丝杆,2b丝杆螺母,3a直线滑轨,3b直线滑块,4电机,5丝杆固定座,6主动同步带轮,7同步带,8从动同步带轮,9电机安装座,10拖链,11检测杆,12举升平台,13管线导向槽,14丝杆支撑座,15a检测开关一,15b检测开关二,15c检测开关三,16机器人。
本发明的工作原理是:首先通过设定检测开关位置,能实现首个点位对应,然后通过伺服控器编码控制电机转动,从而使举升部分通过一定位移量,主动同步轮经由同步带传送到从动同步轮,从动同步轮与丝杠螺母一起运动实现丝杠转动,丝杠举升、下降带动浮动板从而使滑块运动,实现举升平台到达理想位置。
从上述的工作原理表明,机器人升降装置是通过电机编码控制读取检测开关设定原点和达初始位置后,驱动丝杆旋转使滑块直线运动,使举升平台位增量移到达多个精准工作位置。基座与举升平台之间安装有拖链,举升平台上的管线可以通过拖链传送到基座与控制部分相连,当举升平台上下运动时,举升平台上的管线在拖链的保护下随行运动。因此本发明的通过改进结构,即使平台上设备有管线,也可以通过拖链的保护完整的传输到基座,扩展升降装置的应用范围,可在平台上安装带电气结构的夹具或可编程的多轴机器人。
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。

Copyright © 宁波鄞州盖奇同步带轮有限公司 2007-2022 All Rights Reserved.
电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:浙江省宁波市鄞州区姜山镇蔡郎桥村姜南路39-2 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持 浙公网安备33021202003319号
电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:浙江省宁波市鄞州区姜山镇蔡郎桥村姜南路39-2 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持 浙公网安备33021202003319号