产品搜索
当前位置:首页->一种五轴推拿机械臂
一种五轴推拿机械臂
【申请公布号:CN108145705A;申请权利人:张家港科康智能科技有限公司;发明设计人: 陈万荣; 陈修祥; 孙华平;】
摘要:
本发明公开了一种五轴推拿机械臂,包括底座,第一关节臂,第二关节臂,第三关节臂,第四关节臂,第五关节臂,推拿头,所述第一关节臂通过螺栓刚性连接在底座顶面,在所述第一关节臂顶面输出轴处设有第一轴承盖,所述第二关节臂通过连接法兰和圆锥销与第一关节臂输出轴刚性连接,所述第三关节臂通过第一转轴与第二关节臂转动连接,所述第四关节臂与第三关节臂通过第二转轴转动连接,所述第五关节臂通过第三转轴与第四关节臂转动连接,所述推拿头与末端输出轴刚性连接,本发明的优点在于:第一,第五关节臂通过同步带,锥齿轮,第二、三、四关节通过二级同步带传动,可使零件均匀布置在关节臂内,有益于提高机械臂的动静平衡性能。
主权项:
一种五轴推拿机械臂,其特征在于:包括底座(1),第一关节臂(2),第二关节臂(6),第三关节臂(7),第四关节臂(8),第五关节臂(12),连接法兰(5),圆锥(4),第一轴承盖(3),第二轴承盖(11),端盖(10),推拿头(9);所述第一关节臂(2)通过螺栓刚性连接在底座(1)顶面,在所述第一关节臂(2)顶面输出轴(4)处设有第一轴承盖(3),所述第二关节臂(6)通过连接法兰(5)和圆锥销(4)与第一关节臂输出轴(2?1)刚性连接;所述第三关节臂(7)通过第一转轴(6?7)与第二关节臂转动连接;所述第四关节臂(8)与第三关节臂(7)通过第二转轴转动连接;所述第五关节臂(12)通过第三转轴与第四关节臂(8)转动连接;所述端盖(10)刚性连接在末端输出轴出口;所述推拿头(9)与末端输出轴(12?8)刚性连接。
要求:
1.一种五轴推拿机械臂,其特征在于:包括底座(1),第一关节臂(2),第二关节臂(6),第三关节臂(7),第四关节臂(8),第五关节臂(12),连接法兰(5),圆锥(4),第一轴承盖(3),第二轴承盖(11),端盖(10),推拿头(9);所述第一关节臂(2)通过螺栓刚性连接在底座(1)顶面,在所述第一关节臂(2)顶面输出轴(4)处设有第一轴承盖(3),所述第二关节臂(6)通过连接法兰(5)和圆锥销(4)与第一关节臂输出轴(2-1)刚性连接;所述第三关节臂(7)通过第一转轴(6-7)与第二关节臂转动连接;所述第四关节臂(8)与第三关节臂(7)通过第二转轴转动连接;所述第五关节臂(12)通过第三转轴与第四关节臂(8)转动连接;所述端盖(10)刚性连接在末端输出轴出口;所述推拿头(9)与末端输出轴(12-8)刚性连接。
2.根据权利要求书(1)所述的一种五轴推拿机械臂,其特征在于,所述第一关节臂(2)包括:输出轴(2-1),第一大锥齿轮(2-2),第一小锥齿轮(2-3),第一外壳(2-4),第一电机(2-5),第一小同步带轮(2-6),第一同步带(2-7),第一同步带轴(2-8),第二大同步带轮(2-9);所述第一小同步带轮(2-6)通过顶丝,平键与所述第一电机(2-5)输出轴刚性连接,所述第一大同步带轮(2-9)通过顶丝,平键与第一同步带轴(2-8)一端刚性连接,在所述第一同步带轴(2-8)的另一端与小锥齿轮(2-3)刚性连接;所述第一小锥齿轮(2-3)与所述第一大锥齿轮(2-2)相啮合;所述输出轴(2-1)与所述第一大锥齿轮(2-2)刚性连接;所述输出轴(2-1)通过轴承与第一外壳(2-4)转动连接。
3.根据权利要求书(1)所述的一种五轴推拿机械臂,其特征在于,所述第二关节臂包括:第二外壳(6-1),第二电机(6-2),第二同步带轴(6-3),第三小同步带轮(6-4),第三同步带(6-5),第三大同步带轮(6-6),第一转轴(6-7)第二大同步带轮(6-8),第二同步带(6-9),第二小同步带轮(6-10);所述第二小同步带轮(6-10)与第二电机(6-2)输出轴刚性连接,所述第二大同步带轮(6-8)与第二同步带轴(6-3)一端刚性连接,所述第二小同步带轮(6-10),第二大同步带轮(6-8)通过第二同步带(6-9)传动;所述第三小同步带轮(6-4)与第二同步带轴(6-3)另一端刚性连接,所述第三大同步带轮(6-6)与第一转轴(6-7)一端刚性连接,所述第三大同步带轮(6-6)与第三小同步带轮(6-4)通过第三同步带(6-5)传动;所述第一转轴(6-7)通过轴承与第二外壳(6-1)转动连接。
4.所述第五关节臂包括:第三外壳(12-1),第二小锥齿轮(12-2),第三同步带轴(12-3),第四大同步带轮(12-4),第四同步带(12-5),第四小同步带轮(12-6),第三电机(12-7),末端输出轴(12-8),第二大锥齿轮(12-9);所述第四小同步带轮(12-6)与所述第三电机(12-7)刚性连接,所述第四大同步带轮(12-4)与所述第三同步带轴(12-3)一端通过平键与顶丝刚性连接,所述同步带轴(12-3)另一端与第二小锥齿轮(12-2)刚性连接;所述同步带轴(12-3)中间部位通过轴承与第三外壳(12-1)转动连接,所述第二大锥齿轮(12-9)通过平键与末端输出轴中间部位刚性连接,所述第二小锥齿轮(12-2)与所述第二大锥齿轮(12-9)啮合;所述末端输出轴(12-8)两端与第三外壳(12-1)通过轴承转动连接。
5.根据权利要求书(1)所述的一种五轴推拿机械臂,其特征在于,所述第三关节臂,第四关节臂传动方式与第二关节臂相同。
一种五轴推拿机械臂
技术领域
本发明涉及一种推拿用机械臂,属于中医医疗设备现代化的研究领域。
背景技术
推拿疗法作为中国传统医学的重要组成部分,具有简、便、验、廉等特点,是治疗多种疾病行之有效的方法,长期以来为中华民族的健康做出了巨大贡献。但是由于中医推拿受中医推拿师的技术经验的影响,加上中医推拿的高劳动强度,使得中医推拿难以大范围推广。
发明内容
本发明提出了一种关节型的五轴推拿机械臂。
本发明采取的技术方案:一种五轴推拿机械臂,包括底座,第一关节臂,第二关节臂,第三关节臂,第四关节臂,第五关节臂,连接法兰,圆锥销,第一轴承盖,第二轴承盖,端盖,推拿头。所述第一关节臂通过螺栓刚性连接在底座顶面。在所述第一关节臂顶面输出轴处设有第一轴承盖,所述第二关节臂通过连接法兰和圆锥销与第一关节臂输出轴刚性连接。所述第三关节臂通过第一转轴与第二关节臂转动连接。所述第四关节臂与第三关节臂通过第二转轴转动连接。所述第五关节臂通过第三转轴与第四关节臂转动连接。所述端盖刚性连接在末端输出轴出口。所述推拿头与末端输出轴刚性连接。
所述第一关节臂包括:第一外壳,第一电机,第一小同步带轮,第二大同步带轮,第一同步带,第一同步带轴,输出轴,第一小锥齿轮,第一大锥齿轮。所述第一小同步带轮通过顶丝,平键与所述第一电机输出轴刚性连接,所述第一大同步带轮通过顶丝,平键与同步带轴一端刚性连接,在所述第一同步带轴的另一端与小锥齿轮刚性连接。所述第一小锥齿轮与所述第一大锥齿轮想啮合。所述输出轴与所述第一大锥齿轮刚性连接。所述输出轴通过轴承与第一外壳转动连接。
所述第二关节臂包括:第二外壳,第二电机,第二小同步带轮,第二大同步带轮,第三小同步带轮,第三大同步带轮,第二同步带,第三同步带,第二同步带轴,第一转轴。所述第二小同步带轮与第二电机输出轴刚性连接,所述第二大同步带轮与第二同步带轴一端刚性连接,所述第二小同步带轮,第二大同步带轮通过第二同步带传动。所述第三小同步带轮与第二同步带轴另一端刚性连接,所述第三大同步带轮与第一转轴一端刚性连接,所述第三大同步带轮与第三小同步带轮通过第三同步带传动。所述第一转轴通过轴承与第二外壳转动连接。
所述第三关节臂,第四关节臂传动方式与第二关节臂相同。
所述第五关节臂包括:第三外壳,第三电机,第四小同步带轮,第四大同步带轮,第四同步带,第三同步带轴,第二小锥齿轮,第二大锥齿轮,末端输出轴。所述第四小同步带轮与所述第三电机刚性连接,所述第四大同步带轮与所述第三同步带轴一端通过平键与顶丝刚性连接,所述同步带轴另一端与第二小锥齿轮刚性连接。所述同步带轴中间部位通过轴承与第三外壳转动连接,所述大锥齿轮通过平键与末端输出轴中间部位刚性连接,所述第二小锥齿轮与所述第二大锥齿轮啮合。所述末端输出轴两端与第三外壳通过轴承转动连接。
本发明的优点在于:本发明提出的五轴推拿机械臂,第一,第五关节臂通过同步带,锥齿轮,第二、三、四关节通过二级同步带传动,可使零件均匀布置在关节臂内,有益于提高机械臂的动静平衡性能。
附图说明
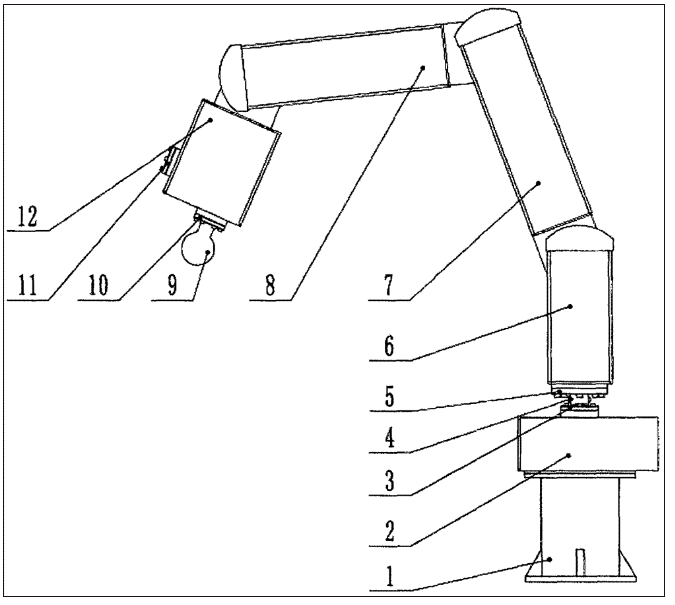
图1为五轴推拿机械臂总体结构示意图。
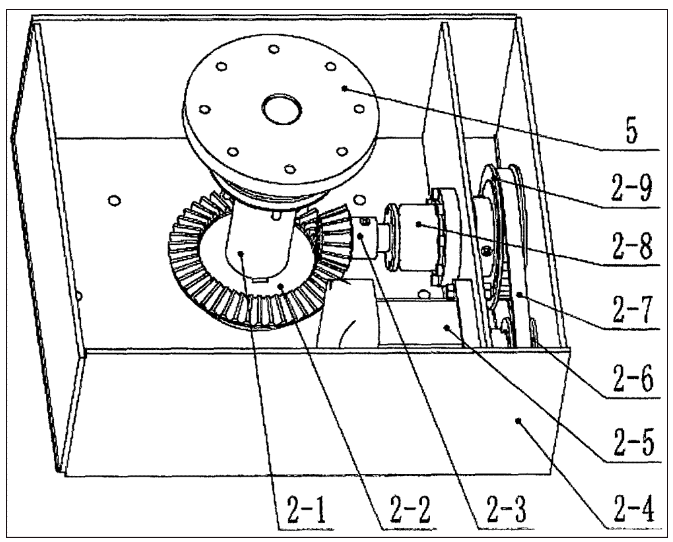
图2为第一关节臂结构示意图。

图3为第二关节臂结构示意图。
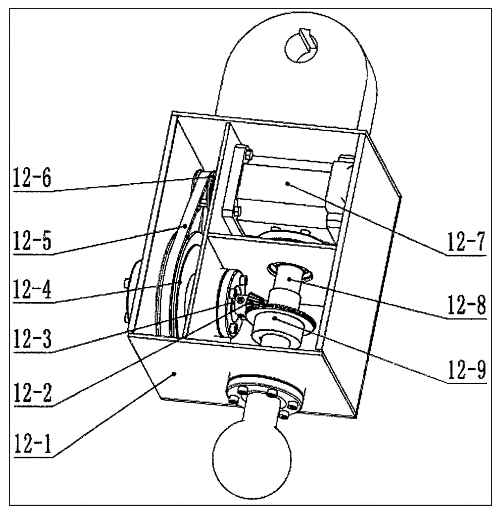
图4为第五关节臂结构示意图。
1:底座;2:第一关节臂;3:第一轴承盖;4:圆锥销;5:连接法兰;6:第二关节臂;7:第三关节臂;8:第四关节臂;9:推拿头;10:端盖;11:第二轴承盖;12:第五关节臂;2-1:输出轴;2-2:第一大锥齿轮;2-3:第一小锥齿轮;2-4:第一外壳;2-5:第一电机;2-6:第一小同步带轮;2-7:第一同步带;2-8:第一同步带轴;2-9:第一大同步带轮;6-1:第二外壳;6-2:第二电机;6-3:第二同步带轴;6-4:第三小同步带轮;6-6:第三大同步带轮;6-7:第一转轴;6-8:第二大同步带轮;6-9:第二同步带;6-10:第二小同步带轮;12-1:第三外壳;12-2:第二小锥齿轮;12-3:第三同步带轴;12-4:第四大同步带轮;12-5:第四同步带;12-6:第四小同步带轮;12-7:第三电机;12-8:末端输出轴;12-9:第二大锥齿轮。
具体实施方式
下面结合附图对本发明做进一步详细说明。
如图1所示,一种五轴推拿机械臂,包括底座1,第一关节臂2,第二关节臂6,第三关节臂7,第四关节臂8,第五关节臂12,连接法兰5,圆锥销4,第一轴承盖3,第二轴承盖11,端盖10,推拿头9。所述第一关节臂2通过螺栓刚性连接在底座1顶面。在所述第一关节臂2顶面输出轴4处设有第一轴承盖3,所述第二关节臂6通过连接法兰5和圆锥销4与第一关节臂输出轴2-1刚性连接。所述第三关节臂7通过第一转轴6-7与第二关节臂转动连接。所述第四关节臂8与第三关节臂7通过第二转轴转动连接。所述第五关节臂12通过第三转轴与第四关节臂8转动连接。所述端盖10刚性连接在末端输出轴出口。所述推拿头9与末端输出轴12-8刚性连接。
所述第一关节臂2包括:输出轴2-1,第一大锥齿轮2-2,第一小锥齿轮2-3,第一外壳2-4,第一电机2-5,第一小同步带轮2-6,第一同步带2-7,第一同步带轴2-8,第二大同步带轮2-9。所述第一小同步带轮2-6通过顶丝,平键与所述第一电机2-5输出轴刚性连接,所述第一大同步带轮2-9通过顶丝,平键与第一同步带轴2-8一端刚性连接,在所述第一同步带轴2-8的另一端与小锥齿轮2-3刚性连接。所述第一小锥齿轮2-3与所述第一大锥齿轮2-2相啮合。所述输出轴2-1与所述第一大锥齿轮2-2刚性连接。所述输出轴2-1通过轴承与第一外壳2-4转动连接。
所述第二关节臂包括:第二外壳6-1,第二电机6-2,第二同步带轴6-3,第三小同步带轮6-4,第三同步带6-5,第三大同步带轮6-6,第一转轴6-7,第二大同步带轮6-8,第二同步带6-9,第二小同步带轮6-10。所述第二小同步带轮6-10与第二电机6-2输出轴刚性连接,所述第二大同步带轮6-8与第二同步带轴6-3一端刚性连接,所述第二小同步带轮6-10,第二大同步带轮6-8通过第二同步带6-9传动。所述第三小同步带轮6-4与第二同步带轴6-3另一端刚性连接,所述第三大同步带轮6-6与第一转轴6-7一端刚性连接,所述第三大同步带轮6-6与第三小同步带轮6-4通过第三同步带6-5传动。所述第一转轴6-7通过轴承与第二外壳6-1转动连接。
所述第三关节臂,第四关节臂传动方式与第二关节臂相同。
所述第五关节臂包括:第三外壳12-1,第二小锥齿轮12-2,第三同步带轴12-3,第四大同步带轮12-4,第四同步带12-5,第四小同步带轮12-6,第三电机12-7,末端输出轴12-8,第二大锥齿轮12-9,。所述第四小同步带轮12-6与所述第三电机12-7刚性连接,所述第四大同步带轮12-4与所述第三同步带轴12-3一端通过平键与顶丝刚性连接,所述同步带轴12-3另一端与第二小锥齿轮12-2刚性连接。所述同步带轴12-3中间部位通过轴承与第三外壳12-1转动连接,所述第二大锥齿轮12-9通过平键与末端输出轴中间部位刚性连接,所述第二小锥齿轮12-2与所述第二大锥齿轮12-9啮合。所述末端输出轴12-8两端与第三外壳12-1通过轴承转动连接。
本发明提出的五轴推拿机械臂,第一,第五关节臂通过同步带,锥齿轮,第二、三、四关节通过二级同步带传动,可使零件均匀布置在关节臂内,有益于提高机械臂的动静平衡性能。

Copyright © 宁波鄞州盖奇同步带轮有限公司 2007-2022 All Rights Reserved.
电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:浙江省宁波市鄞州区姜山镇蔡郎桥村姜南路39-2 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持 浙公网安备33021202003319号
电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:浙江省宁波市鄞州区姜山镇蔡郎桥村姜南路39-2 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持 浙公网安备33021202003319号