产品搜索
当前位置:首页->一种中间传输机械手
一种中间传输机械手
【申请公布号:CN104440868A;申请权利人: 南京埃尔法电液技术有限公司; 南京埃斯顿机器人工程有限公司;发明设计人: 刘伟亮; 王新华; 尹义波; 余继军;】
摘要:
本发明公开了一种中间传输机械手,包括Y轴输送组件,Z轴输送组件,X轴输送组件,X轴输送组件包括第一X轴框架、中间过度板、第二X轴框架和设置在Z轴移送梁底部的第三伺服电机,第一X轴框架上设置第三齿条和第四齿条,第三伺服电机的输出轴上设置第三齿轮,第三齿轮与第三齿条相啮合,第一X轴框架上设置第一同步带,第一同步带的上部与Z轴移送梁底部固定,中间过渡板的上部固定在第一同步带的下部,中间过渡板上设置第四齿轮,第二X轴框架上设置第五齿条,第四齿轮同时与第四齿条和第五齿条相啮合,第二X轴框架上设置第二同步带,第二同步带的上部与中间过渡板的下部固定,第二同步带的下部设置端拾器安装板。有益效果是:解决了现有技术中解决现有技术中机械手避让设备压机的空间、移送距离短、制造安装精度要求较高、冲击、噪音、定位不准确、需要的空间很大的技术缺陷。
主权项:
一种中间传输机械手,其特征在于:包括Y轴输送组件,所述的Y轴输送组件包括横梁、电机安装架、设置在电机安装架上的第一伺服电机,所述的横梁上沿Y轴方向设置第一导轨和第一齿条,所述的电机安装架上设置有与第一导轨相配合的第一导槽,所述的第一伺服电机的输出轴上设置第一齿轮,所述的第一齿轮与第一齿条相啮合;Z轴输送组件,所述的Z轴输送组件包括设置在电机安装架上的第二伺服电机和Z轴移送梁,所述的Z轴移送梁竖直设置,Z轴移送梁上沿Z轴方向设置有第二导轨和第二齿条,所述的电机安装架上设置有与第二导轨相配合的第二导槽,第二伺服电机的输出轴上设置第二齿轮,所述的第二齿轮与第二齿条相啮合;X轴输送组件,所述的X轴输送组件包括第一X轴框架、中间过度板、第二X轴框架和设置在Z轴移送梁底部的第三伺服电机,所述的第一X轴框架上设置第三齿条和第四齿条,第三伺服电机的输出轴上设置第三齿轮,所述的第三齿轮与第三齿条相啮合,所述的第一X轴框架上设置第一同步带,所述的第一同步带的上部与Z轴移送梁底部固定,所述的中间过渡板的上部固定在第一同步带的下部,所述的中间过渡板上设置第四齿轮,所述的第二X轴框架上设置第五齿条,所述的第四齿轮同时与第四齿条和第五齿条相啮合,所述的第二X轴框架上设置第二同步带,所述的第二同步带的上部与中间过渡板的下部固定,第二同步带的下部设置端拾器安装板。
要求:
1.一种中间传输机械手,其特征在于:包括
Y轴输送组件,所述的Y轴输送组件包括横梁、电机安装架、设置在电机安装架上的第一伺服电机,所述的横梁上沿Y轴方向设置第一导轨和第一齿条,所述的电机安装架上设置有与第一导轨相配合的第一导槽,所述的第一伺服电机的输出轴上设置第一齿轮,所述的第一齿轮与第一齿条相啮合;
Z轴输送组件,所述的Z轴输送组件包括设置在电机安装架上的第二伺服电机和Z轴移送梁,所述的Z轴移送梁竖直设置,Z轴移送梁上沿Z轴方向设置有第二导轨和第二齿条,所述的电机安装架上设置有与第二导轨相配合的第二导槽,第二伺服电机的输出轴上设置第二齿轮,所述的第二齿轮与第二齿条相啮合;
X轴输送组件,所述的X轴输送组件包括第一X轴框架、中间过度板、第二X轴框架和设置在Z轴移送梁底部的第三伺服电机,所述的第一X轴框架上设置第三齿条和第四齿条,第三伺服电机的输出轴上设置第三齿轮,所述的第三齿轮与第三齿条相啮合,所述的第一X轴框架上设置第一同步带,所述的第一同步带的上部与Z轴移送梁底部固定,所述的中间过渡板的上部固定在第一同步带的下部,所述的中间过渡板上设置第四齿轮,所述的第二X轴框架上设置第五齿条,所述的第四齿轮同时与第四齿条和第五齿条相啮合,所述的第二X轴框架上设置第二同步带,所述的第二同步带的上部与中间过渡板的下部固定,第二同步带的下部设置端拾器安装板。
2.根据权利要求1所述的中间传输机械手,其特征在于:所述的Z轴移送梁底部设置第三导槽,第一X轴框架的顶部设置与第三导槽相配合的第三导轨,所述的中间过渡板的顶部和底部分别设置第四导槽和第五导槽,所述的第一X轴框架的底部和第二X轴框架的顶部分别设置与第四导槽和第五导槽相配合的第四导轨与第五导轨。
3.根据权利要求1或2所述的四倍速四倍距驱动装置,其特征在于:所述的第三齿条的齿与第三齿轮的中心线均竖直设置,第四齿条与第五齿条的齿和第四齿轮的中心线均水平设置。
一种中间传输机械手
技术领域
本发明涉及一种中间传输机械手,属于机器人制造技术领域。
背景技术
在传统冲压行业,产品的冲压成型主要是依靠人工搬运配合压机的冲压动作实现,存在着效率低下、危险性高以及产品质量参差不齐等缺点。在引进了自动化生产线后,利用机器人和机械手替代了人工搬运工件的动作,不论在安全性还是效率方面都得到了很大的提高。机械手是以伺服电机、气压驱动执行元件、液压驱动执行元件等作为动力源,通过各种传动机构带动吸盘、夹爪等形式的端拾器抓取物料实现不同方向的运动,从而达到移送目的的机器。伴随机床行业的发展从最初的单台压机冲压生产,发展到多台压机连线冲压生产,机械手的样式也在跟随发展,产生了很大的变化。
现在市场上的冲压机械手的结构形式繁复,有的以同步带传动实现物料的移送,同步带的远距离传送,但长距离的传送使同步带的张紧和封闭占用了设计空间,需要解决机械手避让设备压机的空间问题;有的是以齿轮齿条实现物料的移送,但齿轮齿条移送距离不宜太长,制造安装精度要求较高;还有的是以链传动实现物料的移送,链传动较以上两种有冲击和噪音,需要的空间很大,不太适合机械手物料的移送。
发明内容
本发明的目的是提供一种中间传输机械手,解决现有技术中长距离占用空加大以及噪音大的技术缺陷。
为解决上述问题,本发明所采取的技术方案是:
一种中间传输机械手,包括
Y轴输送组件,所述的Y轴输送组件包括横梁、电机安装架、设置在电机安装架上的第一伺服电机,所述的横梁上沿Y轴方向设置第一导轨和第一齿条,所述的电机安装架上设置有与第一导轨相配合的第一导槽,所述的第一伺服电机的输出轴上设置第一齿轮,所述的第一齿轮与第一齿条相啮合;
Z轴输送组件,所述的Z轴输送组件包括设置在电机安装架上的第二伺服电机和Z轴移送梁,所述的Z轴移送梁竖直设置,Z轴移送梁上沿Z轴方向设置有第二导轨和第二齿条,所述的电机安装架上设置有与第二导轨相配合的第二导槽,第二伺服电机的输出轴上设置第二齿轮,所述的第二齿轮与第二齿条相啮合;
X轴输送组件,所述的X轴输送组件包括第一X轴框架、中间过度板、第二X轴框架和设置在Z轴移送梁底部的第三伺服电机,所述的第一X轴框架上设置第三齿条和第四齿条,第三伺服电机的输出轴上设置第三齿轮,所述的第三齿轮与第三齿条相啮合,所述的第一X轴框架上设置第一同步带,所述的第一同步带的上部与Z轴移送梁底部固定,所述的中间过渡板的上部固定在第一同步带的下部,所述的中间过渡板上设置第四齿轮,所述的第二X轴框架上设置第五齿条,所述的第四齿轮同时与第四齿条和第五齿条相啮合,所述的第二X轴框架上设置第二同步带,所述的第二同步带的上部与中间过渡板的下部固定,第二同步带的下部设置端拾器安装板。
本发明通过丝杆副和齿轮、齿条相结合的方式实现物料的移送,既减小了机械手占用的空间又达到了远距离移送物料的目的。该机械手主要用途是:实现大型多工位压力机在工作过程中自动上料、使工件按工艺要求在压机内顺序转换工位、下料,从而达到全自动加工零件的自动化送料设备。该机械手悬挂安装在压机左、右侧立柱上,可以实现竖直抓取、纵向及横向移送的动作,竖直及纵行方向依靠滚珠丝杆副配合直线导轨进行移动,横向依靠齿轮、齿条配合直线导轨进行移动。整个冲压过程中,机械手对料件的移送并不需要压机停机等待,因此生产的效率得到大幅度的提高,机械手的提升、移送的动作和压机的动作在时间上是可以相互重叠的,从而保证了各个方向的动作时间更充分,各部件的运动速度相应降低,实现机械手的动作更加平稳。本发明Z轴移送梁相对于第一X轴框架是固定的,Z轴移送梁底部的第三伺服电机通过第三齿轮与第三齿条驱动第一X轴框架相对于Z轴移送梁以一倍速度一倍距离运动;第一同步带使得中间过度板相对于第一X轴框架以一倍速度一倍距离运动,所以中间过渡板相对于Z轴移送梁以二倍速度二倍距离运动;第四齿轮与第四齿条和第五齿条相啮合,驱动第二X轴框架相对于中间过渡板以一倍速度一倍距离运动,所以第二X轴框架相对于Z轴移送梁以三倍的速度三倍的距离运动;第二同步带的设置使得端拾器安装板相对与第二X轴框架以一倍速度一倍距离运动,所以端拾器安装板相对于Z轴移送梁以四倍速度四倍距离运动,带动端拾器安装板上的端拾器相对与电机安装架以四倍速四倍距运动,端拾器上的物料以四倍速四倍距输送,本发明中齿轮、齿条以及同步带的设置使得第一X轴框架、第二X轴框架、中间过渡板以及端拾器安装板的移动方向保持一直,即要么同时向前运动,要么同时向后运动,所以总的运动的速度和距离是相加的,所以能够实现四倍速四倍距的驱动。本发明的四倍速四倍距驱动装置是通过同步带及齿轮齿条相结合的方式实现物料的移送,解决了机械手长距离传输时设备占用空间大的难题,实现了在小空间内达到高速长距离输送。本发明的四倍速四倍距驱动装置结构紧凑,传输距离长,主要用于多台压机冲压自动化连线的机械手,实现压力机与压力机在工作过程中自动送料。
作为本发明的进一步改进,所述的Z轴移送梁底部设置第三导槽,第一X轴框架的顶部设置与第三导槽相配合的第三导轨,所述的中间过渡板的顶部和底部分别设置第四导槽和第五导槽,所述的第一X轴框架的底部和第二X轴框架的顶部分别设置与第四导槽和第五导槽相配合的第四导轨与第五导轨。
设置导轨与导槽,对第一X轴框架、中间过渡板和第二X轴框架起到很好的支撑作用,不会因为承受重力而使得第一同步带和第二同步带松弛,影响传送。
作为本发明的更进一步改进,所述的第三齿条的齿与第三齿轮的中心线均竖直设置,第四齿条与第五齿条的齿和第四齿轮的中心线均水平设置。
该种设置方式,可进一步的减小齿轮和齿条整体占用的空间,进一步的缩小整个装置占用的空间。
综上所述,本发明的有益效果是:解决了现有技术中解决现有技术中机械手避让设备压机的空间、移送距离短、制造安装精度要求较高、冲击、噪音、定位不准确、需要的空间很大的技术缺陷。
附图说明
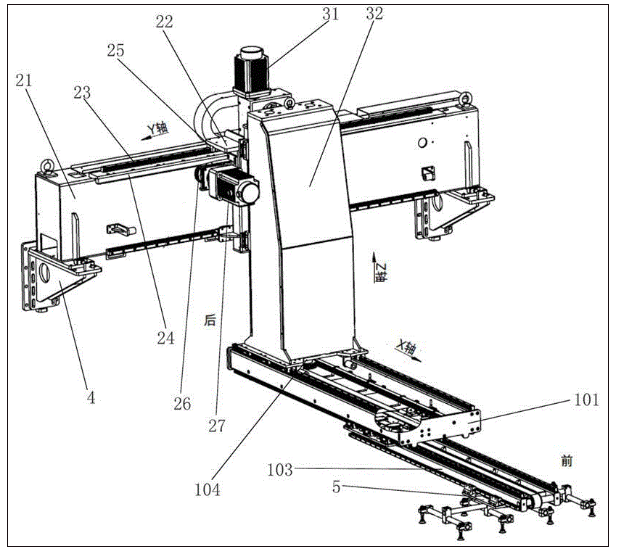
图1是本发明的结构示意图。
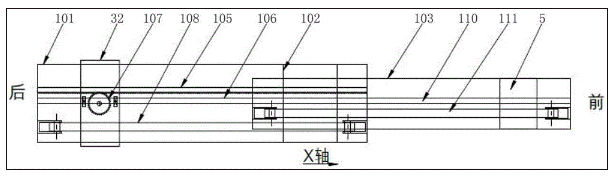
图2是反映本发明中X轴输送组件的俯视图。
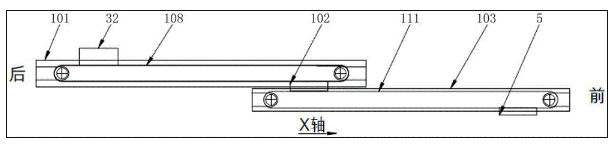
图3是反映本发明中X轴输送组件的主视图。
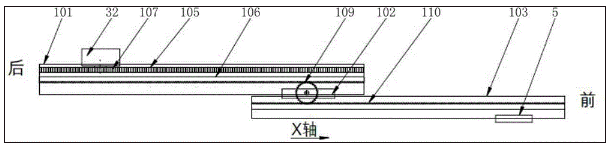
图4是反映本发明中X轴输送组件内齿轮和齿条传动的结构示意图。
具体实施方式
下面结合附图对本发明的具体实施方式做进一步的说明。
如图1、图2和图3所示的中间传输机械手,包括X轴输送组件、Y轴输送组件和Z轴输送组件。
所述的Y轴输送组件包括横梁21、电机安装架22、设置在电机安装架22上的第一伺服电机23,所述的横梁21上沿Y轴方向设置第一导轨23和第一齿条24,所述的第一导轨23有两条,分别设置在横梁21的上部和下部,所述的电机安装架22上设置有与第一导轨23相配合的第一导槽25,所述的第一伺服电机23的输出轴上设置第一齿轮26,所述的第一齿轮26与第一齿条24相啮合,第一伺服电机23驱动第一齿轮26转动,由于第一齿轮26和第一齿条24相啮合,且横梁21的位置固定,所以电机安装架22在第一导轨23上沿着Y轴方向运动,第一伺服电机23的转向决定电机安装架22的运动方向,电机安装架22运动带动X轴输送组件和Z轴输送组件一起沿着Y轴方向运动。横梁21的两端分别设置有安装支架4,用于固定将整个装置。
所述的Z轴输送组件包括设置在电机安装架22上的第二伺服电机31和Z轴移送梁32,所述的Z轴移送梁32竖直设置,Z轴移送梁32上沿Z轴方向设置有第二导轨(图中未示出)和第二齿条(图中未示出),所述的电机安装架22上设置有与第二导轨相配合的第二导槽,所述的第二伺服电机31输出轴竖直设置,且第二伺服电机31的输出轴上通过一堆相啮合的锥齿轮设置第二齿轮(图中未示出),锥齿轮传动为现有技术,此处不予详述,所述的第二齿轮与第二齿条相啮合。第二伺服电机31驱动第二齿轮转动,由于第二齿轮与第二齿条相啮合,且电机安装架22在Z轴方向上的位置相对固定,所以Z轴移送梁32在第二导槽内沿着Z轴的方向运动,Z轴移送梁32移动的方向有电机的转向决定,Z轴移送梁32运动使得X轴输送组件在Z轴的方向上上下运动。
所述的X轴输送组件包括第一X轴框架101、中间过度板102、第二X轴框架103和设置在Z轴移送梁32底部的第三伺服电机104,所述的第一X轴框架101上设置第三齿条105和第四齿条106,第三伺服电机104的输出轴上设置第三齿轮107,所述的第三齿轮107与第三齿条105相啮合,所述的第一X轴框架101上设置第一同步带108,所述的第一同步带108的上部与Z轴移送梁32底部固定,所述的中间过渡板102的上部固定在第一同步带108的下部,所述的中间过渡板102上设置第四齿轮109,所述的第二X轴框架103上设置第五齿条110,所述的第四齿轮109同时与第四齿条106和第五齿条110相啮合,所述的第二X轴框架103上设置第二同步带111,所述的第二同步带111的上部与中间过渡板102的下部固定,第二同步带111的下部设置端拾器安装板5,端拾器安装板5上安装用于抓去物料的端拾器。所述的Z轴移送梁32底部设置第三导槽(图中未示出),第一X轴框架101的顶部设置与第三导槽相配合的第三导轨(图中未示出),所述的中间过渡板102的顶部和底部分别设置第四导槽(图中未示出)和第五导槽(图中未示出),所述的第一X轴框架101的底部和第二X轴框架103的顶部分别设置与第四导槽和第五导槽相配合的第四导轨(图中未示出)与第五导轨(图中未示出)。为进一步的减小所占用的空间,所述的第三齿条105的齿与第三齿轮107的中心线均竖直设置,第四齿条106与第五齿条110的齿和第四齿轮109的中心线均水平设置。
在本装置中Z轴移送梁32在X轴方向的位置相对固定不动。通过安装于Z轴移送梁32上的第三伺服电机104驱动第三齿轮107旋转,第三齿轮107与第三齿条105啮合,由于第三齿轮107与Z轴移送梁32不动,所以第三齿条105沿X轴方向向后运动,从而带动第一X轴框架101整体以1倍速、1倍距向后运动。由于第一同步带108与Z轴移送梁32及中间过渡板102固定在一起,第一X轴框架101整体向后运动,带动中间过渡板102相对于第一X轴框架101以1倍速、1倍距向后运动,由于第一X轴框架101相对于Z轴移送梁32以1倍速、1倍距向后运动,所有中间过渡板102相对于Z轴移送梁32以2倍速、2倍距向后运动。同时第一X轴框架101上的第四齿条106、中间过渡板102上的第四齿轮109及第二X轴框架103上的第五齿条110相互啮合,使第二X轴框架103相对于中间过渡板102以1倍速向后运动,由于中间过渡板102相对于Z轴移送梁32以2倍速、2倍距向后运动,所有第二X轴框架103相对于Z轴移送梁32以3倍速、3倍距向后运动;由于第二X轴同步带111与中间过渡板102及端拾器安装板5固定在一起,第二X轴框架103相对于中间过渡板102以1倍速向后运动,带动端拾器安装板5相对于第二X轴框架103以1倍速向后运动,由于第二X轴框架103相对于Z轴移送梁32以3倍速、3倍距向后运动,所以端拾器安装板5相对于Z轴移送梁32以4倍速、4倍距向后运动,从而实现端拾器抓取的物料相对于Z轴移送梁32以4倍速、4倍距驱动。
本发明中的X轴输送组件、Y轴输送组件和Z轴输送组件可单独作用,也可任意两个一起起作用或者三个一起作用。
本发明中未作特别说明的均为现有技术,或者通过现有技术就能够实现,且应当理解的是本发明中所述具体实施案例仅为本发明的较佳实施案例而已,并非用来限定本发明的实施范围。即凡依本发明申请专利范围的内容所作的等效变化与修饰,都应作为本发明的技术范畴。

Copyright © 宁波鄞州盖奇同步带轮有限公司 2007-2022 All Rights Reserved.
电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:浙江省宁波市鄞州区姜山镇蔡郎桥村姜南路39-2 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持 浙公网安备33021202003319号
电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:浙江省宁波市鄞州区姜山镇蔡郎桥村姜南路39-2 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持 浙公网安备33021202003319号