产品搜索
当前位置:首页->一种适用于工业机器人的两自由度摩擦焊主轴机构
一种适用于工业机器人的两自由度摩擦焊主轴机构
【申请公布号:CN110193657A;申请权利人:上海发那科机器人有限公司;发明设计人: 傅建勋; 吴琼; 汪相龙; 衣琦; 王志龙;】
摘要:
本发明公开了一种适用于工业机器人的两自由度摩擦焊主轴机构,涉及到搅拌摩擦焊的技术领域,包括主轴机架,主轴机架的内部设有主轴回转机构,主轴机架的上侧内壁上设有主轴安装板,主轴安装板上安装有主轴轴向运动机构,且主轴轴向运动机构的下端与主轴回转机构的上端连接,主轴机架的一侧安装有传动机构,传动机构与主轴轴向运动机构传动连接,主轴机架的另一侧设有电机安装板,电机安装板的上端设有第一驱动电机,电机安装板的内部安装有第一同步带轮,第一驱动电机的电机轴与第一同步带轮连接,第一同步带轮通过第一同步带与主轴回转机构传动连接,电机安装板上远离主轴支架的一侧设有同步带涨紧机构。具有精度高、生产效率高的特点。
主权项:
1.一种适用于工业机器人的两自由度摩擦焊主轴机构,其特征在于,包括主轴机架、主轴回转机构、主轴安装板、主轴轴向运动机构、传动机构、电机安装板、第一驱动电机、第一同步带轮、第一同步带和同步带涨紧机构,所述主轴机架的内部设有所述主轴回转机构,所述主轴回转机构的下端向下突出于所述主轴机架,所述主轴机架的上侧内壁上设有所述主轴安装板,所述主轴安装板上安装有所述主轴轴向运动机构,且所述主轴轴向运动机构的下端与所述主轴回转机构的上端连接,所述主轴机架的一侧安装有所述传动机构,所述传动机构与所述主轴轴向运动机构传动连接,所述主轴机架的另一侧设有所述电机安装板,所述电机安装板的上端设有所述第一驱动电机,所述电机安装板的内部安装有所述第一同步带轮,所述第一驱动电机的电机轴与所述第一同步带轮连接,所述第一同步带轮通过所述第一同步带与所述主轴回转机构传动连接,其中,所述电机安装板上远离所述主轴支架的一侧设有所述同步带涨紧机构,所述同步带涨紧机构与所述第一同步带连接。
要求:
1.一种适用于工业机器人的两自由度摩擦焊主轴机构,其特征在于,包括主轴机架、主轴回转机构、主轴安装板、主轴轴向运动机构、传动机构、电机安装板、第一驱动电机、第一同步带轮、第一同步带和同步带涨紧机构,所述主轴机架的内部设有所述主轴回转机构,所述主轴回转机构的下端向下突出于所述主轴机架,所述主轴机架的上侧内壁上设有所述主轴安装板,所述主轴安装板上安装有所述主轴轴向运动机构,且所述主轴轴向运动机构的下端与所述主轴回转机构的上端连接,所述主轴机架的一侧安装有所述传动机构,所述传动机构与所述主轴轴向运动机构传动连接,所述主轴机架的另一侧设有所述电机安装板,所述电机安装板的上端设有所述第一驱动电机,所述电机安装板的内部安装有所述第一同步带轮,所述第一驱动电机的电机轴与所述第一同步带轮连接,所述第一同步带轮通过所述第一同步带与所述主轴回转机构传动连接,其中,所述电机安装板上远离所述主轴支架的一侧设有所述同步带涨紧机构,所述同步带涨紧机构与所述第一同步带连接。
2.如权利要求1所述的适用于工业机器人的两自由度摩擦焊主轴机构,其特征在于,还包括搅拌工具安装柄,所述搅拌工具安装柄位于所述主轴回转机构的下端。
3.如权利要求1所述的适用于工业机器人的两自由度摩擦焊主轴机构,其特征在于,还包括冷却装置,所述主轴回转机构的下端还设有所述冷却装置。
4.如权利要求1所述的适用于工业机器人的两自由度摩擦焊主轴机构,其特征在于,还包括第一带轮中心距调整机构,所述电机安装板上远离所述主轴支架的一侧还设有所述第一带轮中心距调整机构,所述第一带轮中心距调整机构控制所述第一同步带轮。
5.如权利要求1所述的适用于工业机器人的两自由度摩擦焊主轴机构,其特征在于,还包括法兰适配器,所述主轴机架的上端设有所述法兰适配器,所述法兰适配器上均有安装孔,所述主轴机架的上端设有连接孔,所述连接孔与所述主轴机架的内部连通,所述连接孔与所述安装孔相正对。
6.如权利要求1所述的适用于工业机器人的两自由度摩擦焊主轴机构,其特征在于,所述传动机构包括第二驱动电机、第二同步带、第二同步带轮、行星丝杠和安装箱,所述安装箱位于所述主轴机架的一侧,所述第二驱动电机、所述第二同步带和所述第二同步带轮均设置在所述安装箱的内部,且所述第二驱动电机的电机轴与所述第二同步带轮连接,所述第二同步带轮与所述第二同步带传动连接,所述第二同步带通过所述行星丝杠与所述主轴轴向运动机构传动连接。
7.如权利要求6所述的适用于工业机器人的两自由度摩擦焊主轴机构,其特征在于,所述安装箱上靠近所述主轴机架的一侧设有导轨安装面。
8.如权利要求6所述的适用于工业机器人的两自由度摩擦焊主轴机构,其特征在于,还包括第二带轮中心距调整机构,所述第二带轮中心距调整机构位于所述安装箱的一侧,且所述第二带轮中心距调整机构控制所述第二同步带轮。
一种适用于工业机器人的两自由度摩擦焊主轴机构
技术领域
本发明涉及到搅拌摩擦焊的技术领域,尤其涉及到一种适用于工业机器人的两自由度摩擦焊主轴机构。
背景技术
搅拌摩擦焊(friction stir weld,FSW)最早于英国发明,是一种自锁孔连接技术,焊缝是在热-机联合作用下搅拌头与被焊工件之间通过搅拌摩擦产生摩擦热,在搅拌头机械搅拌和顶锻作用下,经由塑性变形和动态再结晶,搅拌头后方的材料形成致密固相连接接头。搅拌头安装在主轴上,主轴是摩擦焊设备的主要核心功能部件。
主轴市场上以专机为主,如搅拌摩擦焊主轴专机仍占据市场大部分份额,柔性搅拌摩擦焊主轴目前市场上还处于空白状态,与专机相比机器人搅拌摩擦焊具有如下优势:重载工业机器人与先进焊接主轴装备的系统集成实现搅拌摩擦焊,将极大提高焊接作业柔性;适用于空间复杂结构产品的焊接制造,并进一步提升焊接自动化程度和生产效率;使用机器人搅拌摩擦焊接时,由于机器人柔性程度高,焊接过程稳定且无需人为干涉,有利于降低成产成本。适用于重载工业机器人的搅拌摩擦焊主轴,作为一种高效、节能、环保型的新型连接技术,机器人搅拌摩擦焊具有广阔的市场前景。
现有主轴主要以专机为主,然而专机柔性低,无法实现复杂零件加工,且主轴主要依靠外部轴实现轴向移动,无法实现独立轴向调整,调整精度不高。
发明内容
本发明的目的在于提供一种适用于工业机器人的两自由度摩擦焊主轴机构,用于解决上述技术问题。
本发明采用的技术方案如下:
一种适用于工业机器人的两自由度摩擦焊主轴机构,包括主轴机架、主轴回转机构、主轴安装板、主轴轴向运动机构、传动机构、电机安装板、第一驱动电机、第一同步带轮、第一同步带和同步带涨紧机构,所述主轴机架的内部设有所述主轴回转机构,所述主轴回转机构的下端向下突出于所述主轴机架,所述主轴机架的上侧内壁上设有所述主轴安装板,所述主轴安装板上安装有所述主轴轴向运动机构,且所述主轴轴向运动机构的下端与所述主轴回转机构的上端连接,所述主轴机架的一侧安装有所述传动机构,所述传动机构与所述主轴轴向运动机构传动连接,所述主轴机架的另一侧设有所述电机安装板,所述电机安装板的上端设有所述第一驱动电机,所述电机安装板的内部安装有所述第一同步带轮,所述第一驱动电机的电机轴与所述第一同步带轮连接,所述第一同步带轮通过所述第一同步带与所述主轴回转机构传动连接,其中,所述电机安装板上远离所述主轴支架的一侧设有所述同步带涨紧机构,所述同步带涨紧机构与所述第一同步带连接。
作为优选,还包括搅拌工具安装柄,所述搅拌工具安装柄位于所述主轴回转机构的下端。
作为优选,还包括冷却装置,所述主轴回转机构的下端还设有所述冷却装置。
作为优选,还包括第一带轮中心距调整机构,所述电机安装板上远离所述主轴支架的一侧还设有所述第一带轮中心距调整机构,所述第一带轮中心距调整机构控制所述第一同步带轮。
作为优选,还包括法兰适配器,所述主轴机架的上端设有所述法兰适配器,所述法兰适配器上均有安装孔,所述主轴机架的上端设有连接孔,所述连接孔与所述主轴机架的内部连通,所述连接孔与所述安装孔相正对。
作为优选,所述传动机构包括第二驱动电机、第二同步带、第二同步带轮、行星丝杠和安装箱,所述安装箱位于所述主轴机架的一侧,所述第二驱动电机、所述第二同步带和所述第二同步带轮均设置在所述安装箱的内部,且所述第二驱动电机的电机轴与所述第二同步带轮连接,所述第二同步带轮与所述第二同步带传动连接,所述第二同步带通过所述行星丝杠与所述主轴轴向运动机构传动连接。
作为进一步的优选,所述安装箱上靠近所述主轴机架的一侧设有导轨安装面。
作为进一步的优选,还包括第二带轮中心距调整机构,所述第二带轮中心距调整机构位于所述安装箱的一侧,且所述第二带轮中心距调整机构控制所述第二同步带轮。
上述技术方案具有如下优点或有益效果:
(1)本发明中的两自由度摩擦焊主轴机构搭载于工业机器人,主要面向轻质金属材料,实现两维及三维复杂曲面的焊接如铝合金材料,镁合金材料等,实现两维及三维复杂曲面的焊接及钻、铣作业;
(2)本发明中的两自由度摩擦焊主轴机构可利用机器人自身集成的传感器或主轴前端安装传感器进行力、位置感知进而实现加工作业的质量控制,可以提高焊接精度;
(3)本发明中的两自由度摩擦焊主轴机构下方预留静轴肩安装孔,可实现静轴肩搅拌摩擦焊。
附图说明
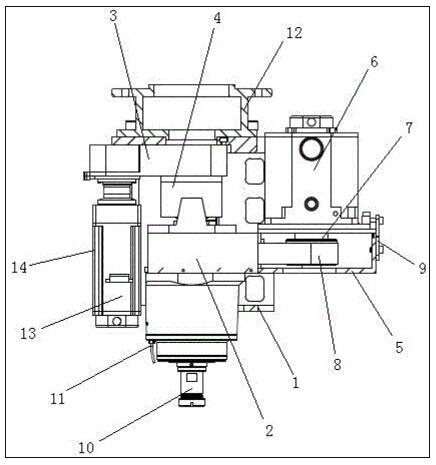
图1是本发明适用于工业机器人的两自由度摩擦焊主轴机构的结构示意图。
图中:1、主轴机架;2、主轴回转机构;3、主轴安装板;4、主轴轴向运动机构;5、电机安装板;6、第一驱动电机;7、第一同步带轮;8、第一同步带;9、同步带涨紧机构;10、搅拌工具安装柄;11、冷却装置;12、法兰适配器;13、第二驱动电机;14、安装箱。
具体实施方式
下面结合附图和具体实施例对本发明作进一步说明,但不作为本发明的限定。
图1是本发明适用于工业机器人的两自由度摩擦焊主轴机构的结构示意图,请参见图1所示,示出了一种较佳实施例,示出的一种适用于工业机器人的两自由度摩擦焊主轴机,包括主轴机架1、主轴回转机构2、主轴安装板3、主轴轴向运动机构4、传动机构、电机安装板5、第一驱动电机6、第一同步带轮7、第一同步带8和同步带涨紧机构9。主轴机架1的内部设有主轴回转机构2,主轴回转机构2的下端向下突出于主轴机架1,主轴机架1的上侧内壁上设有主轴安装板3,主轴安装板3上安装有主轴轴向运动机构4,且主轴轴向运动机构4的下端与主轴回转机构2的上端连接。主轴机架1的一侧安装有传动机构,传动机构与主轴轴向运动机构4传动连接,主轴机架1的另一侧设有电机安装板5,电机安装板5的上端设有第一驱动电机6,电机安装板5的内部安装有第一同步带轮7,第一驱动电机6的电机轴与第一同步带轮7连接,第一同步带轮7通过第一同步带8与主轴回转机构2传动连接。其中,电机安装板5上远离主轴支架1的一侧设有同步带涨紧机构9,同步带涨紧机构9与第一同步带7连接。本实施例中,两自由度摩擦焊主轴机构能够沿主轴的轴线方向转动和移动,即两自由度摩擦焊主轴机构沿轴线方向移动的同时转动,两自由度摩擦焊主轴机构周向转动时传递力矩,轴向移动传递压力,可以给待加工工件施加顶锻力。轴向运动提供顶锻力及必要的摩擦力保持焊接所需的热量,在热-机联合作用下实现焊缝金属的塑性变形,机器人进给完成焊接。在使用时,第一驱动电机6驱动第一同步带轮7转动,第一同步带轮7通过第一同步带8驱动主轴回转机构2进行周向运动,而传动机构驱动主轴轴向运动机构4做轴向运动,主轴轴向运动机构4带动主轴回转机构2做轴向移动,为待加工工件施加顶锻力。设置的同步带涨紧机构9用于控制第一同步带8的放松及涨紧。
进一步,作为一种较佳的实施方式,两自由度摩擦焊主轴机构还包括搅拌工具安装柄10,搅拌工具安装柄10位于主轴回转机构2的下端。主轴回转机构2通过搅拌工具安装柄10连接焊接工具(搅拌头)沿待加工工件的焊缝方向移动,焊接过程中通过集成在机器人上的力传感器感知下压力的大小,通过反馈到的压力值进而调整两自由度摩擦焊主轴机构的轴向运动,实现焊接下压量的调整。
进一步,作为一种较佳的实施方式,两自由度摩擦焊主轴机构还包括冷却装置11,主轴回转机构2的下端还设有冷却装置11。如图1所示,冷却装置11位于主轴回转机构2的下端且位于搅拌工具安装柄10的上侧,用于为主轴回转机构2降温。
进一步,作为一种较佳的实施方式,两自由度摩擦焊主轴机构还包括第一带轮中心距调整机构(图中未示出),电机安装板5上远离主轴支架1的一侧还设有第一带轮中心距调整机构,第一带轮中心距调整机构控制第一同步带轮7。第一带轮中心距调整机构用于控制第一同步带轮7的放松及涨紧。
进一步,作为一种较佳的实施方式,两自由度摩擦焊主轴机构还包括法兰适配器12,主轴机架1的上端设有法兰适配器12,法兰适配器12上均有安装孔,主轴机架1的上端设有连接孔,连接孔与主轴机架1的内部连通,连接孔与安装孔相正对。主轴机架1通过法兰适配器12与机器人上的连接轴连接。
进一步,作为一种较佳的实施方式,传动机构包括第二驱动电机13、第二同步带(图中未示出)、第二同步带轮(图中未示出)、行星丝杠(图中未示出)和安装箱14。安装箱14位于主轴机架1的一侧,第二驱动电机13、第二同步带和第二同步带轮均设置在安装箱14的内部,且第二驱动电机13的电机轴与第二同步带轮连接,第二同步带轮与第二同步带传动连接,第二同步带通过行星丝杠与主轴轴向运动机构4传动连接。第二同步带驱动行星丝杠,行星丝杠将第二驱动电机13的转动转换成主轴轴向运动机构4的轴向运动的动力,进而完成主轴轴向运动机构4轴向位置的调整。
进一步,作为一种较佳的实施方式,安装箱14上靠近主轴机架1的一侧设有导轨安装面。设置的导轨安装面用来实现两自由度摩擦焊主轴机构轴向位置的调整。
进一步,作为一种较佳的实施方式,两自由度摩擦焊主轴机构还包括第二带轮中心距调整机构(图中未示出),第二带轮中心距调整机构位于安装箱14的一侧,且第二带轮中心距调整机构控制第二同步带轮。第二带轮中心距调整机构用来控制第二同步带轮的放松及涨紧。
以上所述仅为本发明较佳的实施例,并非因此限制本发明的实施方式及保护范围,对于本领域技术人员而言,应当能够意识到凡运用本发明说明书及图示内容所作出的等同替换和显而易见的变化所得到的方案,均应当包含在本发明的保护范围内。

Copyright © 宁波鄞州盖奇同步带轮有限公司 2007-2022 All Rights Reserved.
电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:浙江省宁波市鄞州区姜山镇蔡郎桥村姜南路39-2 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持 浙公网安备33021202003319号
电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:浙江省宁波市鄞州区姜山镇蔡郎桥村姜南路39-2 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持 浙公网安备33021202003319号