产品搜索
当前位置:首页->一种半导体晶圆末端执行器
一种半导体晶圆末端执行器
【申请公布号: CN110271030A;申请权利人:北京锐洁机器人科技有限公司;发明设计人: 王强; 周卫国; 刘冬梅; 高勇; 韩晓乐; 徐贺; 尹诚诚;】
摘要:
本发明实施例公开了一种半导体晶圆末端执行器,包括用于固定晶圆的前夹爪模块和后夹爪模块,还包括双滑块直线导轨以及用于驱动双滑块直线导轨上的两个滑块相向运动的同步带机构,所述前夹爪模块和后夹爪模块一一对应地固定于双滑块直线导轨的两个滑块上并随同步带机构的运动而运动;本发明通过同步带机构带动双滑块直线导轨上的两个滑块保持距离一直但方向相反的相向运动,使得无论晶圆尺寸在精度范围境内如何变化都可以保证抓取晶圆的中心位置是一致的,消除了晶圆尺寸变化所带来的中心定位精度变化问题,在部分不需要定位缺口的工艺中,省去了校准器模块的应用。
主权项:
1.一种半导体晶圆末端执行器,包括用于固定晶圆的前夹爪模块(1)和后夹爪模块(2),其特征在于,还包括双滑块直线导轨(5)以及用于驱动双滑块直线导轨(5)上的两个滑块同步相向运动的同步带机构,所述前夹爪模块(1)和后夹爪模块(2)一一对应地固定于双滑块直线导轨(5)的两个滑块上并随同步带机构的运动而运动。
要求:
1.一种半导体晶圆末端执行器,包括用于固定晶圆的前夹爪模块(1)和后夹爪模块(2),其特征在于,还包括双滑块直线导轨(5)以及用于驱动双滑块直线导轨(5)上的两个滑块同步相向运动的同步带机构,所述前夹爪模块(1)和后夹爪模块(2)一一对应地固定于双滑块直线导轨(5)的两个滑块上并随同步带机构的运动而运动。
2.根据权利要求1所述的一种半导体晶圆末端执行器,其特征在于,所述同步带机构包括同步带模块(4)以及用于驱动同步带模块(4)运动的驱动气缸(3),所述同步带模块(4)的一侧与双滑块直线导轨(5)的一个滑块相连,所述同步带模块(4)的另一侧与双滑块直线导轨(5)的另一个滑块相连,所述驱动气缸(3)与前夹爪模块(1)连接。
3.根据权利要求2所述的一种半导体晶圆末端执行器,其特征在于,所述前夹爪模块(1)上设置有推动板(103),所述推动板(103)和所述驱动气缸(3)的输出轴连接。
4.根据权利要求1所述的一种半导体晶圆末端执行器,其特征在于,所述前夹爪模块(1)包括第一卡块(101)以及与第一卡块(101)连接的第一连接板(102),所述第一连接板(102)固定在双滑块直线导轨(5)的一个滑块上。
5.根据权利要求4所述的一种半导体晶圆末端执行器,其特征在于,所述第一连接板(102)为T字型结构,所述第一卡块(101)设置有两个且对称安装在第一连接板(102)的两端。
6.根据权利要求5所述的一种半导体晶圆末端执行器,其特征在于,所述第一连接板(102)通过螺栓与双滑块直线导轨(5)的一个滑块连接,所述第一卡块(101)通过螺栓固定在第一连接板(102)的端部。
7.根据权利要求4所述的一种半导体晶圆末端执行器,其特征在于,所述后夹爪模块(2)包括第二卡块(201)以及与第二卡块(201)连接的第二连接板(202),所述第二连接板(202)固定在双滑块直线导轨(5)的另一个滑块上。
8.根据权利要求7所述的一种半导体晶圆末端执行器,其特征在于,所述第二连接板(202)为Y字型结构,所述第二卡块(201)设置有两个且对称安装在第二连接板(202)的两端。
9.根据权利要求8所述的一种半导体晶圆末端执行器,其特征在于,所述第二连接板(202)通过螺栓与双滑块直线导轨(5)的另一个滑块连接,所述第二卡块(201)通过螺栓固定在第二连接板(202)的端部。
一种半导体晶圆末端执行器
技术领域
本发明实施例涉及半导体技术领域,具体涉及一种半导体晶圆末端执行器。
背景技术
晶圆是指硅半导体集成电路制作所用的硅晶片,由于其形状为圆形,故称为晶圆;在硅晶片上可加工制作成各种电路元件结构,而成为有特定电性功能的集成电路产品。晶圆的原始材料是硅,而地壳表面有用之不竭的二氧化硅。二氧化硅矿石经由电弧炉提炼,盐酸氯化,并经蒸馏后,制成了高纯度的多晶硅,其纯度高达99.999999999%。
在IC行业中,晶圆直径在不断增大,集成电路器件朝小体积、高密度的方向发展,集成度越来越高,对于检测设备的要求也越来越高,为避免人为接触造成芯片污染,高智能和自动化成为研究热点。对于大直径晶圆的芯片检测设备的要求是实现自动测量,所以在晶圆传输环节中需要对晶圆进行精确定心和定位。202
晶圆制造技术对于晶圆定位要求越来越高,但晶圆本身存在加工精度误差问题,现有技术的机械手末端执行器为单方向驱动结构,会导致抓取晶圆的过程迫使晶圆发生加工精度差异的微小位移,从而对晶圆制造产生影响,提高了晶圆制造的不良率。
发明内容
为此,本发明实施例提供一种半导体晶圆末端执行器,以解决现有技术中单方向驱动结构的机械手末端执行器在抓取晶圆的过程迫使晶圆发生加工精度差异的微小位移从而影响了晶圆制造的不良率的问题。
为了实现上述目的,本发明实施例提供如下技术方案:
根据本发明实施例的第一方面,一种半导体晶圆末端执行器,包括用于固定晶圆的前夹爪模块和后夹爪模块,还包括双滑块直线导轨以及用于驱动双滑块直线导轨上的两个滑块相向运动的同步带机构,所述前夹爪模块和后夹爪模块一一对应地固定于双滑块直线导轨的两个滑块上并随同步带机构的运动而运动。
进一步地,所述同步带机构包括同步带模块以及用于驱动同步带模块运动的驱动气缸,所述同步带模块的一侧与双滑块直线导轨的一个滑块相连,所述同步带模块的另一侧与双滑块直线导轨的另一个滑块相连,所述驱动气缸与前夹爪模块连接。
进一步地,所述前夹爪模块上设置有推动板,所述推动板和所述驱动气缸的输出轴连接。
进一步地,所述前夹爪模块包括第一卡块以及与第一卡块连接的第一连接板,所述第一连接板固定在双滑块直线导轨的一个滑块上。
进一步地,所述第一连接板为T字型结构,所述第一卡块设置有两个且对称安装在第一连接板的两端,所述第一连接板通过螺栓与双滑块直线导轨的一个滑块连接。
进一步地,所述第一连接板通过螺栓与双滑块直线导轨的一个滑块连接,所述第一卡块通过螺栓固定在第一连接板的端部。
进一步地,所述后夹爪模块包括第二卡块以及与第二卡块连接的第二连接板,所述第二连接板固定在双滑块直线导轨的另一个滑块上。
进一步地,所述第二连接板为Y字型结构,所述第二卡块设置有两个且对称安装在第二连接板的两端,所述第二连接板通过螺栓与双滑块直线导轨的另一个滑块连接。
进一步地,所述第二连接板通过螺栓与双滑块直线导轨的另一个滑块连接,所述第二卡块通过螺栓固定在第二连接板的端部。
本发明实施例具有如下优点:
本发明通过同步带机构带动双滑块直线导轨上的两个滑块保持距离一直但方向相反的相向运动,使得无论晶圆尺寸在精度范围境内如何变化都可以保证抓取晶圆的中心位置是一致的,消除了晶圆尺寸变化所带来的中心定位精度变化问题,在部分不需要定位缺口的工艺中,省去了校准器模块的应用。
附图说明
为了更清楚地说明本发明的实施方式或现有技术中的技术方案,下面将对实施方式或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是示例性的,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图引伸获得其它的实施附图。
本说明书所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容得能涵盖的范围内。
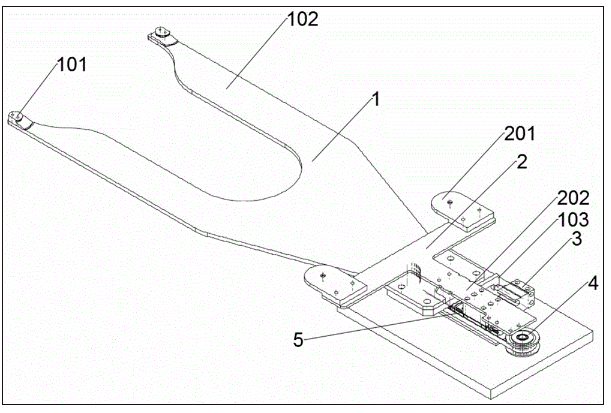
图1为本发明提供的末端执行器的一种具体实施方式的整体结构示意图。
图中:
1-前夹爪模块;2-后夹爪模块;3-驱动气缸;4-同步带模块;5-双滑块直线导轨;
101-第一卡块;102-第一连接板;103-推动板;
201-第二卡块;202-第二连接板。
具体实施方式
以下由特定的具体实施例说明本发明的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本发明的其他优点及功效,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
现有技术的机械手末端执行器为单方向驱动结构,会导致抓取晶圆的过程迫使晶圆发生加工精度差异的微小位移,从而对晶圆制造产生影响,提高了晶圆制造的不良率。
因此,本发明实施例的特征之处在于,消除了晶圆尺寸变化所带来的中心定位精度变化问题,具体地:
如图1所示,本发明实施例公开了一种半导体晶圆末端执行器,包括用于固定晶圆的前夹爪模块1和后夹爪模块2,还包括双滑块直线导轨5以及用于驱动双滑块直线导轨5上的两个滑块相向运动的同步带机构,所述前夹爪模块1和后夹爪模块2一一对应地固于双滑块直线导轨5的两个滑块上并随同步带机构的运动而运动。
具体地,在本实施方式中,所述同步带机构包括同步带模块4以及用于驱动同步带模块4运动的驱动气缸3,所述同步带模块4的一侧与双滑块直线导轨5的一个滑块相连,所述同步带模块4的另一侧与双滑块直线导轨5的另一个滑块相连,所述前夹爪模块1上设置有向一侧延伸的推动板103,所述推动板103和所述驱动气缸3的输出轴连接。
所述前夹爪模块1包括第一卡块101以及与第一卡块101连接的第一连接板102,所述第一连接板102为T字型结构,所述第一卡块101设置有两个且对称安装在第一连接板102的两端,所述第一连接板102通过螺栓与双滑块直线导轨5的一个滑块连接,所述第一卡块101通过螺栓固定在第一连接板102的端部。
所述后夹爪模块2包括第二卡块201以及与第二卡块201连接的第二连接板202,所述第二连接板202为T字型结构,所述第二卡块201设置有两个且对称安装在第二连接板202的两端,所述第二连接板202通过螺栓与双滑块直线导轨5的另一个滑块连接,所述第二卡块201通过螺栓固定在第二连接板202的端部。
本发明实施例对晶圆进行夹持抓取的过程为:首先通过控制驱动气缸3的收缩从而带动前夹爪模块1向X正方向移动,由于前夹爪模块1固定在双滑块直线导轨5的一个滑块上,而滑块与同步带模块4的一侧连接,因此也会带动同步带模块4的一侧与前夹爪模块1保持同向运动,此时同步带模块4的另一侧向X负方向运动,而与后夹爪模块2连接的滑块也会向X负方向运动,实现了前夹爪模块1与后夹爪模块2保持运动距离相同但运动方向相反的相向运动,在这种运动条件下,晶圆尺寸在精度范围内如何变化,都可以保证抓取晶圆的中心位置是一致的,晶圆可以实现定位中心,在部分不需要定位缺口的工艺中,省去了校准器模块的应用。
虽然,上文中已经用一般性说明及具体实施例对本发明作了详尽的描述,但在本发明基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本发明精神的基础上所做的这些修改或改进,均属于本发明要求保护的范围。

Copyright © 宁波鄞州盖奇同步带轮有限公司 2007-2022 All Rights Reserved.
电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:浙江省宁波市鄞州区姜山镇蔡郎桥村姜南路39-2 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持 浙公网安备33021202003319号
电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:浙江省宁波市鄞州区姜山镇蔡郎桥村姜南路39-2 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持 浙公网安备33021202003319号