产品搜索
当前位置:首页->定位补偿装置
定位补偿装置
【授权公告号:CN210121858U;申请权利人:北京京东尚科信息技术有限公司; 北京京东世纪贸易有限公司;发明设计人: 孙雪军; 赵超越; 杨嵩; 王占军; 孙勇;】
摘要:
本申请实施例公开了一种定位补偿装置,其特征在于,包括:规正组件(100),包括至少一组横向第一规正结构(110)和至少一组纵向第二规正结构(120);控制组件(200),所述控制组件(200)通过同步带和同步带轮组控制所述第一规正结构(110)进行横向规正并且控制所述第二规正结构(120)进行纵向规正,对目标物的位置进行定位补偿,以使得所述目标物位于预定位置,其中,所述同步带轮组包括上下间隔设置的同步上层带轮和同步下层带轮。本申请实施例实现对目标物的位置的自动补偿,提高了自动化作业的效率。
主权项:
1.一种定位补偿装置,其特征在于,包括:规正组件(100),包括至少一组横向第一规正结构(110)和至少一组纵向第二规正结构(120);控制组件(200),所述控制组件(200)通过同步带和同步带轮组控制所述第一规正结构(110)进行横向规正并且控制所述第二规正结构(120)进行纵向规正,对目标物的位置进行定位补偿,以使得所述目标物位于预定位置,其中,所述同步带轮组包括上下间隔设置的同步上层带轮和同步下层带轮。
要求:
?
1.一种定位补偿装置,其特征在于,包括:
规正组件(100),包括至少一组横向第一规正结构(110)和至少一组纵向第二规正结构(120);
控制组件(200),所述控制组件(200)通过同步带和同步带轮组控制所述第一规正结构(110)进行横向规正并且控制所述第二规正结构(120)进行纵向规正,对目标物的位置进行定位补偿,以使得所述目标物位于预定位置,
其中,所述同步带轮组包括上下间隔设置的同步上层带轮和同步下层带轮。
2.根据权利要求1所述的定位补偿装置,其特征在于,还包括:
支撑组件(300),包括用于为所述规正组件(100)和所述控制组件(200)提供刚性支撑的结构支架(310),所述结构支架(310)上固定设置有导轨(320),所述导轨(320)包括横向第一导轨组和纵向第二导轨组,用于为定位补偿所述目标物的位置提供运动导向。
3.根据权利要求2所述的定位补偿装置,其特征在于,所述第一规正结构(110)包括沿横向平行排列的第一规正杆(111)和第二规正杆(112);
所述第二规正结构(120)包括沿纵向平行排列的第三规正杆(121)和第四规正杆(122),所述第一至第四规正杆之间构成用于放置所述目标物的交叉区域。
4.根据权利要求3所述的定位补偿装置,其特征在于,所述控制组件(200)控制所述第一规正杆(111)和所述第二规正杆(112)之间相向或相背运动,控制所述第三规正杆(121)和所述第四规正杆(122)之间相向或相背运动。
5.根据权利要求4所述的定位补偿装置,其特征在于,所述至少一组横向第一规正结构(110)沿着所述纵向第二导轨组移动,所述至少一组纵向第二规正结构(120)沿着所述横向第一导轨组移动。
6.根据权利要求5所述的定位补偿装置,其特征在于,所述横向第一导轨组包括沿横向平行排列的第一导轨(321)和第二导轨(322);
所述纵向第二导轨组包括沿纵向平行排列的第三导轨(323)和第四导轨(324)。
7.根据权利要求6所述的定位补偿装置,其特征在于,所述控制组件(200)包括:
第一同步带(211)、第二同步带(212)、第三同步带(213)和第四同步带(214),所述第一同步带(211)、第二同步带(212)、第三同步带(213)和第四同步带(214)分别为沿所述第一导轨(321)、所述第二导轨(322)、所述第三导轨(323)和所述第四导轨(324)周向设置的闭合结构;
第一同步带轮组(221)、第二同步带轮组(222)、第三同步带轮组(223)和第四同步带轮组(224),所述第一同步带轮组(221)、第二同步带轮组(222)、第三同步带轮组(223)和第四同步带轮组(224)绕固定连接在所述结构支架(310)和所述导轨(320)上的轴承座转动;
电动机(230),用于驱动所述第一同步带轮组(221),所述电动机(230)的输出轴和所述第一同步带轮组(221)同轴;以及
减速器(240),安装于所述电动机(230)和所述第一同步带轮组(221)之间,用于减速增扭所述第一同步带轮组(221),所述减速器(240)的输出轴和所述第一同步带轮组(221)同轴。
8.根据权利要求7所述的定位补偿装置,其特征在于,所述第一同步带轮组(221)包括上下间隔设置的第一同步上层带轮(221a)和第一同步下层带轮(221b),所述第二同步带轮组(222)包括上下间隔设置的第二同步上层带轮(222a)和第二同步下层带轮(222b),所述第三同步带轮组(223)包括上下间隔设置的第三同步上层带轮(223a)和第三同步下层带轮(223b),所述第四同步带轮组(224)包括上下间隔设置的第四同步上层带轮(224a)和第四同步下层带轮(224b)。
9.根据权利要求8所述的定位补偿装置,其特征在于,所述第一同步上层带轮(221a)和所述第一同步下层带轮(221b)分别用于驱动所述第一同步带(211)和所述第四同步带(214)。
10.根据权利要求9所述的定位补偿装置,其特征在于,所述第一同步带(211)的内侧与所述第一同步上层带轮(221a)和所述第四同步上层带轮(224a)的外侧轮啮合;
所述第二同步带(212)的内侧与所述第二同步上层带轮(222a)和所述第三同步上层带轮(223a)的外侧轮啮合;
所述第三同步带(213)的内侧与所述第三同步下层带轮(223b)和所述第四同步下层带轮(224b)的外侧轮啮合;以及
所述第四同步带(214)的内侧与所述第一同步下层带轮(221b)和所述第二同步下层带轮(222b)的外侧轮啮合。
11.根据权利要求10所述的定位补偿装置,其特征在于,还包括:滑块(400),用于将所述第一至第四规正杆的两端固定连接至所述第一至第四同步带。
12.根据权利要求11所述的定位补偿装置,其特征在于,所述滑块(400)包括:第一外侧滑块(411)、第二外侧滑块(412)、第三外侧滑块(413)和第四外侧滑块(414),以及第一内侧滑块(421)、第二内侧滑块(422)、第三内侧滑块(423)和第四内侧滑块(424);
所述第一外侧滑块(411)和所述第一内侧滑块(421)分别与所述第一同步带(211)的外侧和内侧固定连接;
所述第二外侧滑块(412)和所述第二内侧滑块(422)分别与所述第二同步带(212)的外侧和内侧固定连接;
所述第三外侧滑块(413)和所述第三内侧滑块(423)分别与所述第三同步带(213)的外侧和内侧固定连接;以及
所述第四外侧滑块(414)和所述第四内侧滑块(424)分别与所述第四同步带(214)的外侧和内侧固定连接。
13.根据权利要求12所述的定位补偿装置,其特征在于,所述第一规正杆(111)的一端固定连接所述第三内侧滑块(423),所述第一规正杆(111)的另一端固定连接所述第四外侧滑块(414);
所述第二规正杆(112)的一端固定连接所述第三外侧滑块(413),所述第二规正杆(112)的另一端固定连接所述第四内侧滑块(424);
所述第三规正杆(121)的一端固定连接所述第一外侧滑块(411),所述第三规正杆(121)的另一端固定连接所述第二内侧滑块(422);以及
所述第四规正杆(122)的一端固定连接所述第一内侧滑块(421),所述第四规正杆(122)的另一端固定连接所述第二外侧滑块(412)。
14.根据权利要求13所述的定位补偿装置,其特征在于,
所述第一规正杆(111)和所述第二规正杆(112)位于第一平面,所述第三规正杆(121)和所述第四规正杆(122)位于第二平面,所述第一平面与所述第二平面互相平行。
15.根据权利要求14所述的定位补偿装置,其特征在于,
所述第一至第四同步带轮组为链轮,所述第一至第四同步带为链条;或
所述第一至第四同步带轮组为履带轮,所述第一至第四同步带为履带;或
所述第一至第四同步带轮组为皮带轮,所述第一至第四同步带为皮带。
16.根据权利要求15所述的定位补偿装置,其特征在于,所述结构支架(310),包括电动机安装架(311)和结构框架(312),所述结构框架(312)包括上下分层设置的矩形框架和机械接口;
所述电动机安装架(311),用于固定电动机(230),与所述第一同步带轮组(221)上下间隔设置于所述结构框架(312)的一个角,所述第二同步带轮组(222)、所述第三同步带轮组(223)和所述第四同步带轮组(224)分别设置于所述结构框架(312)的其余角。
定位补偿装置
技术领域
本实用新型涉及自动化技术领域,具体涉及一种定位补偿装置。
背景技术
随着智能科学的不断发展,人们的生产作业越来越依托于自动化设备,一个结果物的产出往往需要多个设备、工序协同配合完成。目标物在不同的设备之间进行传递、运输等操作时,需要通过机械手完成目标物的存入和取出。
在上述工作过程中,由于目标物在被机械手存入和/或取出的过程中,会在惯性作用下发生小范围的移动,在X方向和/或Y方向上存在交错和/或偏转,即目标物没有位于承载台的预定位置,出现偏离承载台的预定位置的情况。而由于在自动化作业过程中机械手的动作具有一致性,因此可能会出现机械手无法取出偏离预定位置的目标物,下一工序无法继续的情况;或者出现在机械手取出偏离预定位置的目标物的过程中损坏目标物的情况,影响自动化作业的处理效率。
实用新型内容
有鉴于此,本实用新型实施例提供一种定位补偿装置,实现对目标物的位置的自动补偿,提高自动化作业的效率。
根据本实用新型提供一种定位补偿装置,包括:
规正组件(100),包括至少一组横向第一规正结构(110)和至少一组纵向第二规正结构(120);
控制组件(200),所述控制组件(200)通过同步带和同步带轮组控制所述第一规正结构(110)进行横向规正并且控制所述第二规正结构(120)进行纵向规正,对目标物的位置进行定位补偿,以使得所述目标物位于预定位置,
其中,所述同步带轮组包括上下间隔设置的同步上层带轮和同步下层带轮。
优选地,所述的定位补偿装置,还包括:
支撑组件(300),包括用于为所述规正组件(100)和所述控制组件(200)提供刚性支撑的结构支架(310),所述结构支架(310)上固定设置有导轨(320),所述导轨(320)包括横向第一导轨组和纵向第二导轨组,用于为定位补偿所述目标物的位置提供运动导向。
优选地,所述第一规正结构(110)包括沿横向平行排列的第一规正杆(111)和第二规正杆(112);
所述第二规正结构(120)包括沿纵向平行排列的第三规正杆(121)和第四规正杆(122),所述第一至第四规正杆之间构成用于放置所述目标物的交叉区域。
优选地,所述控制组件(200)控制所述第一规正杆(111)和所述第二规正杆(112)之间相向或相背运动,控制所述第三规正杆(121)和所述第四规正杆(122)之间相向或相背运动。
优选地,所述至少一组横向第一规正结构(110)沿着所述纵向第二导轨组移动,所述至少一组纵向第二规正结构(120)沿着所述横向第一导轨组移动。
优选地,所述横向第一导轨组包括沿横向平行排列的第一导轨(321)和第二导轨(322);
所述纵向第二导轨组包括沿纵向平行排列的第三导轨(323)和第四导轨(324)。
优选地,所述控制组件(200)包括:
第一同步带(211)、第二同步带(212)、第三同步带(213)和第四同步带(214),所述第一同步带(211)、第二同步带(212)、第三同步带(213)和第四同步带(214)分别为沿所述第一导轨(321)、所述第二导轨(322)、所述第三导轨(323)和所述第四导轨(324)周向设置的闭合结构;
第一同步带轮组(221)、第二同步带轮组(222)、第三同步带轮组(223)和第四同步带轮组(224),所述第一同步带轮组(221)、第二同步带轮组(222)、第三同步带轮组(223)和第四同步带轮组(224)绕固定连接在所述结构支架(310)和所述导轨(320)上的轴承座转动;
电动机(230),用于驱动所述第一同步带轮组(221),所述电动机(230)的输出轴和所述第一同步带轮组(221)同轴;以及
减速器(240),安装于所述电动机(230)和所述第一同步带轮组(221)之间,用于减速增扭所述第一同步带轮组(221),所述减速器(240)的输出轴和所述第一同步带轮组(221)同轴。
优选地,所述第一同步带轮组(221)包括上下间隔设置的第一同步上层带轮(221a)和第一同步下层带轮(221b),所述第二同步带轮组(222)包括上下间隔设置的第二同步上层带轮(222a)和第二同步下层带轮(222b),所述第三同步带轮组(223)包括上下间隔设置的第三同步上层带轮(223a)和第三同步下层带轮(223b),所述第四同步带轮组(224)包括上下间隔设置的第四同步上层带轮(224a)和第四同步下层带轮(224b)。
优选地,所述第一同步上层带轮(221a)和所述第一同步下层带轮(221b)分别用于驱动所述第一同步带(211)和所述第四同步带(214)。
优选地,所述第一同步带(211)的内侧与所述第一同步上层带轮(221a)和所述第四同步上层带轮(224a)的外侧轮啮合;
所述第二同步带(212)的内侧与所述第二同步上层带轮(222a)和所述第三同步上层带轮(223a)的外侧轮啮合;
所述第三同步带(213)的内侧与所述第三同步下层带轮(223b)和所述第四同步下层带轮(224b)的外侧轮啮合;以及
所述第四同步带(214)的内侧与所述第一同步下层带轮(221b)和所述第二同步下层带轮(222b)的外侧轮啮合。
优选地,所述的定位补偿装置,还包括:滑块(400),用于将所述第一至第四规正杆的两端固定连接至所述第一至第四同步带。
优选地,所述滑块(400)包括:第一外侧滑块(411)、第二外侧滑块(412)、第三外侧滑块(413)和第四外侧滑块(414),以及第一内侧滑块(421)、第二内侧滑块(422)、第三内侧滑块(423)和第四内侧滑块(424);
所述第一外侧滑块(411)和所述第一内侧滑块(421)分别与所述第一同步带(211)的外侧和内侧固定连接;
所述第二外侧滑块(412)和所述第二内侧滑块(422)分别与所述第二同步带(212)的外侧和内侧固定连接;
所述第三外侧滑块(413)和所述第三内侧滑块(423)分别与所述第三同步带(213)的外侧和内侧固定连接;以及
所述第四外侧滑块(414)和所述第四内侧滑块(424)分别与所述第四同步带(214)的外侧和内侧固定连接。
优选地,所述第一规正杆(111)的一端固定连接所述第三内侧滑块(423),所述第一规正杆(111)的另一端固定连接所述第四外侧滑块(414);
所述第二规正杆(112)的一端固定连接所述第三外侧滑块(413),所述第二规正杆(112)的另一端固定连接所述第四内侧滑块(424);
所述第三规正杆(121)的一端固定连接所述第一外侧滑块(411),所述第三规正杆(121)的另一端固定连接所述第二内侧滑块(422);以及
所述第四规正杆(122)的一端固定连接所述第一内侧滑块(421),所述第四规正杆(122)的另一端固定连接所述第二外侧滑块(412)。
优选地,所述第一规正杆(111)和所述第二规正杆(112)位于第一平面,所述第三规正杆(121)和所述第四规正杆(122)位于第二平面,所述第一平面与所述第二平面互相平行。
优选地,所述第一至第四同步带轮组为链轮,所述第一至第四同步带为链条;或
所述第一至第四同步带轮组为履带轮,所述第一至第四同步带为履带;或
所述第一至第四同步带轮组为皮带轮,所述第一至第四同步带为皮带。
优选地,所述结构支架(310),包括电动机安装架(311)和结构框架(312),所述结构框架(312)包括上下分层设置的矩形框架和机械接口;
所述电动机安装架(311),用于固定电动机(230),与所述第一同步带轮组(221)上下间隔设置于所述结构框架(312)的一个角,所述第二同步带轮组(222)、所述第三同步带轮组(223)和所述第四同步带轮组(224)分别设置于所述结构框架(312)的其余角。
本实用新型的实施例具有以下优点或有益效果:
本实用新型实施例提供的定位补偿装置中,该定位补偿装置,包括规正组件(100)和控制组件(200)。规正组件(100)包括至少一组横向第一规正结构(110)和至少一组纵向第二规正结构(120)。控制组件(200)通过同步带和包括上下间隔设置的同步上层带轮和同步下层带轮的同步带轮组控制第一规正结构(110)进行横向规正并且控制第二规正结构(120)进行纵向规正,对目标物的位置进行定位补偿,以使得目标物可以精准的位于预定位置,实现对目标物的自动规正,提高自动化作业的效率。
在优选地实施例中,控制组件(200)包括:第一同步带(211)、第二同步带(212)、第三同步带(213)和第四同步带(214),第一同步带轮组(221)、第二同步带轮组(222)、第三同步带轮组(223)和第四同步带轮组(224)。第一外侧滑块(411)和第一内侧滑块(421)分别与第一同步带(211)的外侧和内侧固定连接。第二外侧滑块(412)和第二内侧滑块(422)分别与第二同步带(212)的外侧和内侧固定连接。第三外侧滑块(413)和第三内侧滑块(423)分别与第三同步带(213)的外侧和内侧固定连接。第四外侧滑块(414)和第四内侧滑块(424)分别与第四同步带(214)的外侧和内侧固定连接。第一规正杆(111)的一端固定连接第三内侧滑块(423),第一规正杆(111)的另一端固定连接所述第四外侧滑块(414)。第二规正杆(112)的一端固定连接第三外侧滑块(413),第二规正杆(112)的另一端固定连接所述第四内侧滑块(424)。第三规正杆(121)的一端固定连接第一外侧滑块(411),第二规正杆(121)的另一端固定连接第二内侧滑块(422)。第四规正杆(122)的一端固定连接第一内侧滑块(421),第二规正杆(122)的另一端固定连接第二外侧滑块(412)。因此当电机带动第一同步上层带轮(221a)和第一同步下层带轮(221b)逆时针转动时,第一规正杆(111)和第二规正杆(112)相向运动,第三规正杆(121)和第四规正杆(122)相向运动。当电机带动第一同步上层带轮(221a)和第一同步下层带轮(221b)顺时针转动时,第一规正杆(111)和第二规正杆(112)相背运动,第三规正杆(121)和第四规正杆(122)相背运动。通过两个方向上的规正杆之间的聚拢和扩散实现对目标物的横向和纵向自动规正,以对目标物实现较大范围的定位补偿。
在优选地实施例中,支撑组件(300)包括结构支架(310)和导轨(320)。导轨(320)包括横向第一导轨组和纵向第二导轨组。横向第一导轨组包括沿横向平行排列的第一导轨(321)和第二导轨(322)。纵向第二导轨组包括沿纵向平行排列的第三导轨(323)和第四导轨(324)。第一同步带(211)、第二同步带(212)、第三同步带(213)和第四同步带(214)分别为沿第一导轨(321)、第二导轨(322)、第三导轨(323)和第四导轨(324)周向设置的闭合结构。第一至第四同步带和滑块(400)沿导轨(320)滑动,导轨(320)用于提高第一至第四同步带的承载能力,同时对第一至第四同步带进行限位。
在优选地实施例中,结构框架(312)包括上下分层设置的矩形框架和机械接口,便于将该定位补偿装置安装于在相应系统中。
附图说明
通过参照以下附图对本实用新型实施例的描述,本实用新型的上述以及其它目的、特征和优点将更为清楚,在附图中:
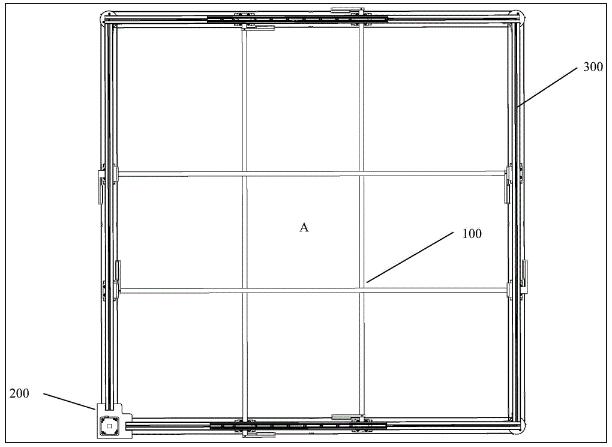
图1是根据本实用新型一实施例的定位补偿装置的俯视图;
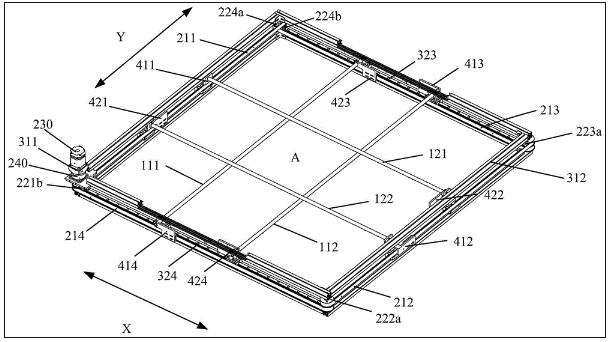
图2是根据本实用新型一实施例的定位补偿装置的结构示意图;
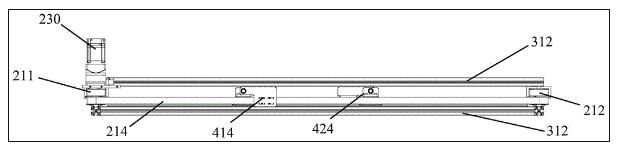
图3是根据本实用新型一实施例的定位补偿装置的主视图;
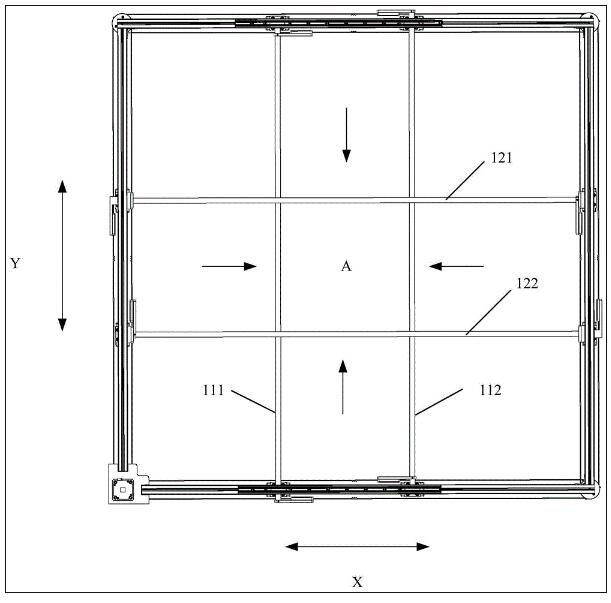
图4是根据本实用新型一实施例的定位补偿装置第一工作模式下的示意图;
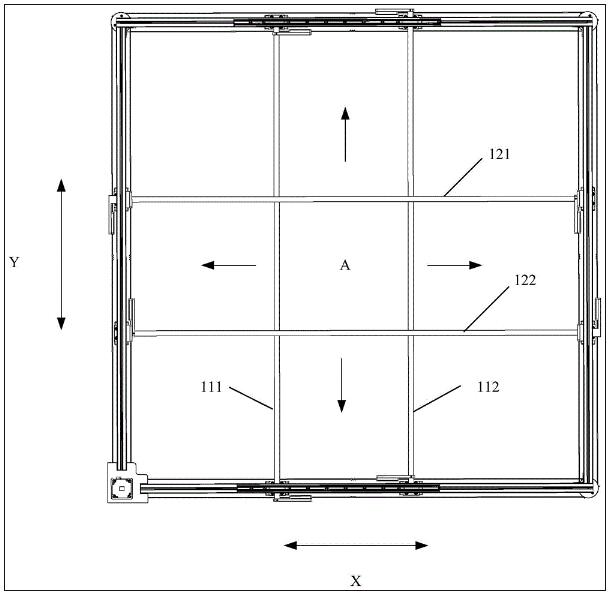
图5是根据本实用新型一实施例的定位补偿装置第二工作模式下的示意图。
具体实施方式
以下基于实施例对本实用新型进行描述,但是本实用新型并不仅仅限于这些实施例。在下文对本实用新型的细节描述中,详尽描述了一些特定的细节部分。对本领域技术人员来说没有这些细节部分的描述也可以完全理解本实用新型。为了避免混淆本实用新型的实质,公知的方法、过程、流程没有详细叙述。另外附图不一定是按比例绘制的。
图1示出了本实用新型一实施例的定位补偿装置的俯视图,如图1所示,该定位补偿装置,包括规正组件(100)和控制组件(200)。规正组件(100)包括至少一组横向第一规正结构(110)和至少一组纵向第二规正结构(120)。控制组件(200)通过同步带和包括上下间隔设置的同步上层带轮和同步下层带轮的同步带轮组控制第一规正结构(110)进行横向规正并且控制第二规正结构(120)进行纵向规正,对目标物的位置进行定位补偿,以使得目标物位于预定位置A。该定位补偿装置,还包括支撑组件(300)。支撑组件(300)包括用于为规正组件(100)和控制组件(200)提供刚性支撑的结构支架(310)。结构支架(310)上固定设置有导轨(320)。导轨(320)包括横向第一导轨组和纵向第二导轨组,用于为定位补偿目标物的位置提供运动导向。
本实用新型实施例提供的定位补偿装置中,该定位补偿装置,包括规正组件(100)和控制组件(200)。规正组件(100)包括至少一组横向第一规正结构(110)和至少一组纵向第二规正结构(120)。控制组件(200)控制第一规正结构(110)进行横向规正,控制第二规正结构(120)进行纵向规正,对目标物的位置进行定位补偿,以使得目标物位于预定位置A。由此分析可知,以无人机落货为例,无人机将货物落到承载台用于放置货物的区域中,控制组件(100)控制第一规正结构(110)对货物进行横向规正(X方向规正),控制第二规正结构(120)对货物进行纵向规正(Y方向规正),以使得货物可以位于指定位置,避免货物出现偏离指定位置的情况,进而保证下一工序可以自动进行,提高自动化作业的效率。
图2示出了本实用新型一实施例的定位补偿装置的结构示意图。图3示出了本实用新型一实施例的定位补偿装置的主视图。具体地,如图2和图3所示,支撑组件(300)包括结构支架(310)和导轨(320)。结构支架(310)和导轨(320)呈上下布局。导轨(320)包括横向第一导轨组和纵向第二导轨组。横向第一导轨组包括沿横向平行排列的第一导轨(321)和第二导轨(322)。纵向第二导轨组包括沿纵向平行排列的第三导轨(323)和第四导轨(324)。至少一组横向第一规正结构(110)沿着纵向第二导轨组移动,至少一组纵向第二规正结构(120)沿着横向第一导轨组移动。结构支架(310),包括电动机安装架(311)和结构框架(312)。结构框架(312)包括上下分层设置的矩形框架和机械接口。电动机安装架(311),用于固定电动机(230),与第一同步带轮组(221)上下间隔设置于结构框架(312)的一个角。第二同步带轮组(222)、第三同步带轮组(223)和第四同步带轮组(224)分别设置于结构框架(312)的其余角。
规正组件(100),包括至少一组横向第一规正结构(110)和至少一组纵向第二规正结构(120)。第一规正结构(110)包括沿横向平行排列的第一规正杆(111)和第二规正杆(112)。第二规正结构(12 0)包括沿纵向平行排列的第三规正杆(121)和第四规正杆(122)。第一至第四规正杆之间构成用于放置目标物的交叉区域A。控制组件(200)控制第一规正杆(111)和第二规正杆(112)之间相向或相背运动,控制第三规正杆(121)和第四规正杆(122)之间相向或相背运动。
控制组件(200)包括:第一同步带(211)、第二同步带(212)、第三同步带(213)和第四同步带(214),第一同步带轮组(221)、第二同步带轮组(222)、第三同步带轮组(223)和第四同步带轮组(224),以及电动机(230)和减速器(240)。第一同步带轮组(221)包括上下间隔设置的第一同步上层带轮(221a)和第一同步下层带轮(221b)。第二同步带轮组(222)包括上下间隔设置的第二同步上层带轮(222a)和第二同步下层带轮(222b)。第三同步带轮组(223)包括上下间隔设置的第三同步上层带轮(223a)和第三同步下层带轮(223b)。第四同步带轮组(224)包括上下间隔设置的第四同步上层带轮(224a)和第四同步下层带轮(224b)。
具体地,第一同步带(211)、第二同步带(212)、第三同步带(213)和第四同步带(214)分别为沿第一导轨(321)、第二导轨(322)、第三导轨(323)和第四导轨(324)周向设置的闭合结构。第一同步带轮组(221)、第二同步带轮组(222)、第三同步带轮组(223)和第四同步带轮组(224)绕固定连接在结构支架(310)和导轨(320)上的轴承座转动。第一同步上层带轮(221a)和第一同步下层带轮(221b)分别用于驱动第一同步带(211)和第四同步带(214)。第一同步带(211)的内侧与第一同步上层带轮(221a)和第四同步上层带轮(224a)的外侧轮啮合。第二同步带(212)的内侧与第二同步上层带轮(222a)和第三同步上层带轮(223a)的外侧轮啮合。第三同步带(213)的内侧与第三同步下层带轮(223b)和第四同步下层带轮(224b)的外侧轮啮合。第四同步带(214)的内侧与第一同步下层带轮(221b)和第二同步下层带轮(222b)的外侧轮啮合。
第一至第四同步带与第一至第四同步带轮组的啮合方式,还可以为第一同步带(211)的内侧与第一同步下层带轮(221b)和第四同步下层带轮(224b)的外侧轮啮合。第二同步带(212)的内侧与第二同步下层带轮(222b)和第三同步下层带轮(223b)的外侧轮啮合。第三同步带(213)的内侧与第三同步上层带轮(223a)和第四同步上层带轮(224a)的外侧轮啮合。第四同步带(214)的内侧与第一同步上层带轮(221a)和第二同步上层带轮(222a)的外侧轮啮合。可以理解的是,第一至第四同步带与第一至第四同步带轮组的啮合方式不应作为对本实用新型的限制。
如图2所示,该定位补偿装置,还包括:用于将第一至第四规正杆的两端固定连接至第一至第四同步带的滑块(400)。滑块(400)包括:第一外侧滑块(411)、第二外侧滑块(412)、第三外侧滑块(413)和第四外侧滑块(414),以及第一内侧滑块(421)、第二内侧滑块(422)、第三内侧滑块(423)和第四内侧滑块(424)。第一外侧滑块(411)和第一内侧滑块(421)分别与第一同步带(211)的外侧和内侧固定连接。第二外侧滑块(412)和第二内侧滑块(422)分别与第二同步带(212)的外侧和内侧固定连接。第三外侧滑块(413)和第三内侧滑块(423)分别与第三同步带(213)的外侧和内侧固定连接。第四外侧滑块(414)和第四内侧滑块(424)分别与第四同步带(214)的外侧和内侧固定连接。
第一规正杆(111)的一端固定连接第三内侧滑块(423),第一规正杆(111)的另一端固定连接第四外侧滑块(414)。第二规正杆(112)的一端固定连接第三外侧滑块(413),第二规正杆(112)的另一端固定连接第四内侧滑块(424)。第三规正杆(121)的一端固定连接第一外侧滑块(411),第三规正杆(121)的另一端固定连接第二内侧滑块(422)。第四规正杆(122)的一端固定连接第一内侧滑块(421),第四规正杆(122)的另一端固定连接第二外侧滑块(412)。
第一规正杆(111)和第二规正杆(112)位于第一平面,第三规正杆(121)和第四规正杆(122)位于第二平面,第一平面与第二平面互相平行。
电动机(230)用于驱动第一同步带轮组(221)。电动机(230)的输出轴和第一同步带轮组(221)同轴,用于带动第一同步带轮组(221)同向、等速转动。减速器(240)安装于电动机(230)和第一同步带轮组(221)之间,并且安装在电动机安装架(311)上。减速器(240)的输出轴和第一同步带轮组(221)同轴,用于减速增扭第一同步带轮组(221)。
图4和图5示出本实用新型一实施例的定位补偿装置的工作示意图。以下参照图4和图5对本实用新型实施例的定位补偿装置的工作原理进行详细说明。
第一规正结构(110)包括沿横向(X方向)平行排列的第一规正杆(111)和第二规正杆(112),第一规正杆(111)和第二规正杆(112)的两端通过滑块(400)分别与第三同步带(213)和第四同步带(214)连接。当第三同步带(213)和第四同步带(214)转动时,可带动第一规正杆(111)和第二规正杆(112)朝相反的方向运动。
第二规正结构(120)包括沿纵向(Y方向)平行排列的第三规正杆(121)和第四规正杆(122),第三规正杆(121)和第四规正杆(122)的两端通过滑块(400)分别与第一同步带(211)和第二同步带(212)连接。当第一同步带(211)和第二同步带(212)转动时,可带动第三规正杆(121)和第四规正杆(122)朝相反的方向运动。
首先电动机(230)带动第一同步上层带轮(221a)和第一同步下层带轮(221b)逆时针旋转,因第一同步带(211)的内侧与第一同步上层带轮(221a)外侧轮啮合,第四同步带(214)的内侧与第一同步下层带轮(221b)外侧轮啮合,所以第一同步带(211)和第四同步带(214)分别在第一同步上层带轮(221a)和第一同步下层带轮(221b)的带动下逆时针转动。另外,因第一同步带(211)的内侧与第四同步上层带轮(224a)的外侧轮啮合,第四同步带(214)的内侧与第二同步下层带轮(222b)的外侧轮啮合,所以第一同步带(211)和第四同步带(214)分别带动第四同步上层带轮(224a)和第二同步下层带轮(222b)逆时针转动。又因为第四同步上层带轮(224a)和第四同步下层带轮(224b)同步,第二同步下层带轮(222b)和第二同步上层带轮(222a)同步,所以第四同步上层带轮(224a)和第二同步下层带轮(222b)分别带动第四同步下层带轮(224b)和第二同步上层带轮(222a)逆时针转动。第三同步带(213)的内侧与第四同步下层带轮(224b)的外侧轮啮合,第二同步带(212)的内侧与第二同步上层带轮(222a)的外侧轮啮合,进而第四同步下层带轮(224b)和第二同步上层带轮(222a)分别带动第三同步带(213)和第二同步带(212)逆时针转动。
第一规正杆(111)的一端固定连接第三内侧滑块(423),第一规正杆(111)的另一端固定连接第四外侧滑块(414)。第三内侧滑块(423)与第三同步带(213)的内侧固定连接,第四外侧滑块(414)与所述第四同步带(214)的外侧固定连接。第二规正杆(112)的一端固定连接第三外侧滑块(413),第二规正杆(112)的另一端固定连接第四内侧滑块(424)。第三外侧滑块(413)与第三同步带(213)的外侧固定连接,第四内侧滑块(424)与第四同步带(214)的内侧固定连接。当第三同步带(213)与所述第四同步带(214)逆时针转动时,第一规正杆(111)和第二规正杆(112)相向运动。
第三规正杆(121)的一端固定连接第一外侧滑块(411),第三规正杆(121)的另一端固定连接第二内侧滑块(422)。第一外侧滑块(411)与第一同步带(211)的外侧固定连接。第二内侧滑块(422)与第二同步带(212)的内侧固定连接。第四规正杆(122)的一端固定连接第一内侧滑块(421),第二规正杆(122)的另一端固定连接第二外侧滑块(412)。第一内侧滑块(421)与第一同步带(211)的内侧固定连接,第二外侧滑块(412)与第二同步带(212)的外侧固定连接。当第一同步带(211)与第二同步带(212)逆时针转动时,第三规正杆(121)和第四规正杆(122)相向运动。如图4所示。随着第一至第四规正杆之间的交叉区域逐渐减小,第一至第四规正杆可对目标物进行横向和纵向上的规正,使得目标物精准位于预定位置A。
可以理解的是,电动机(230)带动第一同步上层带轮(221a)和第一同步下层带轮(221b)顺时针旋转,因第一同步带(211)的内侧与第一同步上层带轮(221a)外侧轮啮合,第四同步带(214)的内侧与第一同步下层带轮(221b)外侧轮啮合,所以第一同步带(211)和第四同步带(214)分别在第一同步上层带轮(221a)和第一同步下层带轮(221b)的带动下顺时针转动。另外,因第一同步带(211)的内侧与第四同步上层带轮(224a)的外侧轮啮合,第四同步带(214)的内侧与第二同步下层带轮(222b)的外侧轮啮合,所以第一同步带(211)和第四同步带(214)分别带动第四同步上层带轮(224a)和第二同步下层带轮(222b)顺时针转动。又因为第四同步上层带轮(224a)和第四同步下层带轮(224b)同步,第二同步下层带轮(222b)和第二同步上层带轮(222a)同步,所以第四同步上层带轮(224a)和第二同步下层带轮(222b)分别带动第四同步下层带轮(224b)和第二同步上层带轮(222a)顺时针转动。第三同步带(213)的内侧与第四同步下层带轮(224b)的外侧轮啮合,第二同步带(212)的内侧与第二同步上层带轮(222a)的外侧轮啮合,进而第四同步下层带轮(224b)和第二同步上层带轮(222a)分别带动第三同步带(213)和第二同步带(212)顺时针转动。
第一规正杆(111)的一端固定连接第三内侧滑块(423),第一规正杆(111)的另一端固定连接第四外侧滑块(414)。第三内侧滑块(423)与第三同步带(213)的内侧固定连接,第四外侧滑块(414)与所述第四同步带(214)的外侧固定连接。第二规正杆(112)的一端固定连接第三外侧滑块(413),第二规正杆(112)的另一端固定连接第四内侧滑块(424)。第三外侧滑块(413)与第三同步带(213)的外侧固定连接,第四内侧滑块(424)与第四同步带(214)的内侧固定连接。当第三同步带(213)与所述第四同步带(214)顺时针转动时,第一规正杆(111)和第二规正杆(112)相背运动。
第三规正杆(121)的一端固定连接第一外侧滑块(411),第三规正杆(121)的另一端固定连接第二内侧滑块(422)。第一外侧滑块(411)与第一同步带(211)的外侧固定连接。第二内侧滑块(422)与第二同步带(212)的内侧固定连接。第四规正杆(122)的一端固定连接第一内侧滑块(421),第二规正杆(122)的另一端固定连接第二外侧滑块(412)。第一内侧滑块(421)与第一同步带(211)的内侧固定连接,第二外侧滑块(412)与第二同步带(212)的外侧固定连接。当第一同步带(211)与第二同步带(212)顺时针转动时,第三规正杆(121)和第四规正杆(122)相背运动。如图5所示。最终第一至第四规正杆停靠在结构框架(312)的边沿位置,第一至第四规正杆之间的交叉区域增大,可以使得目标物能够准确的位于第一至第四规正杆之间的交叉区域。
需要说明的是,本实用新型的实施例对同步带轮组的种类不做具体限定,第一至第四同步带轮组可以为链轮,第一至第四同步带为链条;或者第一至第四同步带轮组为履带轮,第一至第四同步带为履带;或者第一至第四同步带轮组为皮带轮,第一至第四同步带为皮带。可以根据实际使用和生产情况选择同步带轮组的类型和具体传动方式。
综上所述,本实用新型实施例提供的定位补偿装置中,该定位补偿装置,包括规正组件和控制组件。规正组件包括至少一组横向第一规正结构和至少一组纵向第二规正结构。控制组件通过同步带和包括上下间隔设置的同步上层带轮和同步下层带轮的同步带轮组控制第一规正结构进行横向规正并且控制第二规正结构进行纵向规正,对目标物的位置进行定位补偿,以使得目标物可以精准的位于预定位置,实现对目标物的自动规正,提高自动化作业的效率。
在优选地实施例中,控制组件(200)包括:第一同步带(211)、第二同步带(212)、第三同步带(213)和第四同步带(214),第一同步带轮组(221)、第二同步带轮组(222)、第三同步带轮组(223)和第四同步带轮组(224)。第一外侧滑块(411)和第一内侧滑块(421)分别与第一同步带(211)的外侧和内侧固定连接。第二外侧滑块(412)和第二内侧滑块(422)分别与第二同步带(212)的外侧和内侧固定连接。第三外侧滑块(413)和第三内侧滑块(423)分别与第三同步带(213)的外侧和内侧固定连接。第四外侧滑块(414)和第四内侧滑块(424)分别与第四同步带(214)的外侧和内侧固定连接。第一规正杆(111)的一端固定连接第三内侧滑块(423),第一规正杆(111)的另一端固定连接所述第四外侧滑块(414)。第二规正杆(112)的一端固定连接第三外侧滑块(413),第二规正杆(112)的另一端固定连接所述第四内侧滑块(424)。第三规正杆(121)的一端固定连接第一外侧滑块(411),第二规正杆(121)的另一端固定连接第二内侧滑块(422)。第四规正杆(122)的一端固定连接第一内侧滑块(421),第二规正杆(122)的另一端固定连接第二外侧滑块(412)。因此当电机带动第一同步上层带轮(221a)和第一同步下层带轮(221b)逆时针转动时,第一规正杆(111)和第二规正杆(112)相向运动,第三规正杆(121)和第四规正杆(122)相向运动。当电机带动第一同步上层带轮(221a)和第一同步下层带轮(221b)顺时针转动时,第一规正杆(111)和第二规正杆(112)相背运动,第三规正杆(121)和第四规正杆(122)相背运动。通过两个方向上的规正杆之间的聚拢和扩散实现对目标物的横向和纵向自动规正,以对目标物实现较大范围的定位补偿。
在优选地实施例中,支撑组件(300)包括结构支架(310)和导轨(320)。导轨(320)包括横向第一导轨组和纵向第二导轨组。横向第一导轨组包括沿横向平行排列的第一导轨(321)和第二导轨(322)。纵向第二导轨组包括沿纵向平行排列的第三导轨(323)和第四导轨(324)。第一同步带(211)、第二同步带(212)、第三同步带(213)和第四同步带(214)分别为沿第一导轨(321)、第二导轨(322)、第三导轨(323)和第四导轨(324)周向设置的闭合结构。第一至第四同步带和滑块(400)沿导轨(320)滑动,导轨(320)用于提高第一至第四同步带的承载能力,同时对第一至第四同步带进行限位。
在优选地实施例中,结构框架(312)包括上下分层设置的矩形框架和机械接口,便于将该定位补偿装置安装于在相应系统中。
以上所述仅为本实用新型的优选实施例,并不用于限制本实用新型,对于本领域技术人员而言,本实用新型可以有各种改动和变化。凡在本实用新型的精神和原理之内所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。

Copyright © 宁波鄞州盖奇同步带轮有限公司 2007-2022 All Rights Reserved.
电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:浙江省宁波市鄞州区姜山镇蔡郎桥村姜南路39-2 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持 浙公网安备33021202003319号
电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:浙江省宁波市鄞州区姜山镇蔡郎桥村姜南路39-2 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持 浙公网安备33021202003319号