产品搜索
当前位置:首页->医用导管模块推块传动机构
医用导管模块推块传动机构
【申请公布号:CN110893997A;申请权利人:烟台凯博机械自动化设备有限公司;发明设计人: 李艳伟; 赵立平; 赵尊玄; 闫春武; 于朝气;】
摘要:
本发明提供了一种医用导管模块推块传动机构,包括上推单元和下推单元,上推单元和下推单元之间设有传动单元,所述上推单元和下推单元均包括推块传动装置和模块翻转装置,所述推块传动装置包括传动主轴底板,传动主轴底板下方设有电机固定架,伺服传动电机通过电机固定架固定在传动主轴底板上,传动主轴底板上方设有传动滑轨A,传动滑轨A上方左端设有推块固定板,传动滑轨A右端固定在滑轨固定座板上,滚珠传动丝杠固定在推块固定板上,滚珠传动丝杠一端与同步带轮相连接,同步带轮通过传动皮带与伺服传动电机相连。本发明的模块推块传动采用一组件为一个模块,每传动一次,运动一个模块,消除运动不平稳、噪音大等原有的弊端。
主权项:
1.医用导管模块推块传动机构,包括上推单元(1)和下推单元(2),上推单元(1)和下推单元(2)之间设有传动单元(3),其特征在于所述上推单元(1)和下推单元(2)均包括推块传动装置和模块翻转装置,所述推块传动装置包括传动主轴底板(117),传动主轴底板(117)下方设有电机固定架(103),伺服传动电机(102)通过电机固定架(103)固定在传动主轴底板(117)上,传动主轴底板(117)上方设有传动滑轨A(116),传动滑轨A(116)上方左端设有推块固定板(113),传动滑轨A(116)右端固定在滑轨固定座板(114)上,滚珠传动丝杠(115)固定在推块固定板(113)上,滚珠传动丝杠(115)一端与同步带轮(105)相连接,同步带轮(105)通过传动皮带(101)与伺服传动电机(102)相连,推块固定板(113)上设有推块上推板(203)或推块下推板(201);所述模块翻转装置包括推块上推板(120)或推块下推板(201),推块上推板(120)内侧上端固定设有两个推块限位块A(111),推块限位块A(111)中间设有接近开关B(112),推块下推板(201)内侧中部设有两个推块限位块B(204),推块限位块B(204)上设有接近开关D(205);传动主轴底板(117)上端左右两侧均设有转轴支撑端轴承座(205),所述右侧转轴支撑端轴承座(122)与推块上推板(120)或推块下推板(201)之间设有翻转电机主轴(121),翻转电机主轴(121)左端穿过推块上推板(120)或推块下推板(201)与翻转气缸(118)相连,所述翻转电机主轴(121)上设有固定滑轨(108),固定滑轨(108)上设有推块滑块(110)和模块胎具(109),推块滑块(110)推动模块胎具(109)前行,所述推块上推板(120)内侧两端和推块下推板(201)上方均设有翻转限位座(119),翻转电机主轴(121)下方、推块上推板(120)上固定设有滑台尼龙顶块A(106),其中间设有接近开关A(107),推块下推板(201)最上方设有滑台尼龙顶块B(202),其中间设有接近开关C(203),推块上推板(120)和推块下推板(201)左下方均设有感应开关装置(104)。
要求:
1.医用导管模块推块传动机构,包括上推单元(1)和下推单元(2),上推单元(1)和下推单元(2)之间设有传动单元(3),其特征在于所述上推单元(1)和下推单元(2)均包括推块传动装置和模块翻转装置,所述推块传动装置包括传动主轴底板(117),传动主轴底板(117)下方设有电机固定架(103),伺服传动电机(102)通过电机固定架(103)固定在传动主轴底板(117)上,传动主轴底板(117)上方设有传动滑轨A(116),传动滑轨A(116)上方左端设有推块固定板(113),传动滑轨A(116)右端固定在滑轨固定座板(114)上,滚珠传动丝杠(115)固定在推块固定板(113)上,滚珠传动丝杠(115)一端与同步带轮(105)相连接,同步带轮(105)通过传动皮带(101)与伺服传动电机(102)相连,推块固定板(113)上设有推块上推板(203)或推块下推板(201);所述模块翻转装置包括推块上推板(120)或推块下推板(201),推块上推板(120)内侧上端固定设有两个推块限位块A(111),推块限位块A(111)中间设有接近开关B(112),推块下推板(201)内侧中部设有两个推块限位块B(204),推块限位块B(204)上设有接近开关D(205);传动主轴底板(117)上端左右两侧均设有转轴支撑端轴承座(205),所述右侧转轴支撑端轴承座(122)与推块上推板(120)或推块下推板(201)之间设有翻转电机主轴(121),翻转电机主轴(121)左端穿过推块上推板(120)或推块下推板(201)与翻转气缸(118)相连,所述翻转电机主轴(121)上设有固定滑轨(108),固定滑轨(108)上设有推块滑块(110)和模块胎具(109),推块滑块(110)推动模块胎具(109)前行,所述推块上推板(120)内侧两端和推块下推板(201)上方均设有翻转限位座(119),翻转电机主轴(121)下方、推块上推板(120)上固定设有滑台尼龙顶块A(106),其中间设有接近开关A(107),推块下推板(201)最上方设有滑台尼龙顶块B(202),其中间设有接近开关C(203),推块上推板(120)和推块下推板(201)左下方均设有感应开关装置(104)。
2.如权利要求1所述的医用导管模块推块传动机构,其特征在于所述中间的传动单元(3)包括多个主架固定座(302),主架固定座(302)上固定设有主架梁托(301),主架梁托(301)上设有传动滑轨B(303),传动滑轨B(303)上端与上推单元(1)的传动滑轨A(116)相连接,下端与下推单元(2)的传动滑轨相连接。
医用导管模块推块传动机构
技术领域
本发明属于医疗设备技术领域,具体地说涉及一种医用导管模块推块传动机构。
背景技术
现在用的导管传动方式大都是伺服电机带动齿轮转动,链条作为传动载体,进行传动。这种传动机构存在诸多弊端。弊端一:一般得传动机构可达6-10米,前期链条的制作加工不能准确保证其精确度,链条的焊接过程也会出现误差;弊端二:链条传动运动时,噪音太大,运动不平稳,链条还需定期保养,保证正常运作,防止造成较高的设备故障率。
发明内容
本发明提供了一种医用导和模块推块传动机构,解决了背景技术中链条传动噪音大、运动不平稳、设备故障率高等缺点。
本发明的技术方案是这样实现的:医用导管模块推块传动机构,包括上推单元和下推单元,上推单元和下推单元之间设有传动单元,所述上推单元和下推单元均包括推块传动装置和模块翻转装置,所述推块传动装置包括传动主轴底板,传动主轴底板下方设有电机固定架,伺服传动电机通过电机固定架固定在传动主轴底板上,传动主轴底板上方设有传动滑轨A,传动滑轨A上方左端设有推块固定板,传动滑轨A右端固定在滑轨固定座板上,滚珠传动丝杠固定在推块固定板上,滚珠传动丝杠一端与同步带轮相连接,同步带轮通过传动皮带与伺服传动电机相连,推块固定板上设有推块上推板或推块下推板;所述模块翻转装置包括推块上推板或推块下推板,推块上推板内侧上端固定设有两个推块限位块A,推块限位块A中间设有接近开关B,推块下推板内侧中部设有两个推块限位块B,推块限位块B上设有接近开关D;传动主轴底板上端左右两侧均设有转轴支撑端轴承座,所述右侧转轴支撑端轴承座与推块上推板或推块下推板之间设有翻转电机主轴,翻转电机主轴左端穿过推块上推板或推块下推板与翻转气缸相连,所述翻转电机主轴上设有固定滑轨,固定滑轨上设有推块滑块和模块胎具,推块滑块推动模块胎具前行,所述推块上推板内侧两端和推块下推板上方均设有翻转限位座,翻转电机主轴下方、推块上推板上固定设有滑台尼龙顶块A,其中间设有接近开关A,推块下推板最上方设有滑台尼龙顶块B,其中间设有接近开关C,推块上推板和推块下推板左下方均设有感应开关装置;
优选的,所述中间的传动单元包括多个主架固定座,主架固定座上固定设有主架梁托,主架梁托上设有传动滑轨B,传动滑轨B上端与上推单元的传动滑轨A相连接,下端与下推单元的传动滑轨相连接。
本发明的有益效果是:本发明的模块推块传动装置,一端为上推机构,一端为下推机构,上推单元运动时,采用滚动丝杠与推块固定板连接,带动固定在推块固定板上的推板推动模块,通过电机与同步带轮同步运动,实现模块胎具的推进,在上侧推块推着模块胎具前进的时候,另一端下推单元的下推块上部安有滑台尼龙顶块,顶块中间安装有接近开关,当模块胎具与尼龙顶块接触的时候,接近开关起到作用,模块胎具运动到位,上推单元的滚珠丝杠、电机等回到原点;在翻转过程中,利用旋转气缸进行翻转,在翻转侧装有光电感应开关和翻转限位座,更好的确保翻转到位。本发明的模块推块传动采用一组件为一个模块,每传动一次,运动一个模块,消除运动不平稳、噪音大等原有的弊端。
附图说明
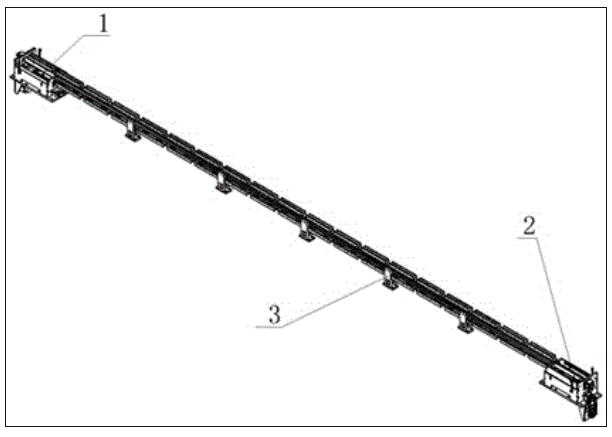
图1为本发明的整体结构示意图;
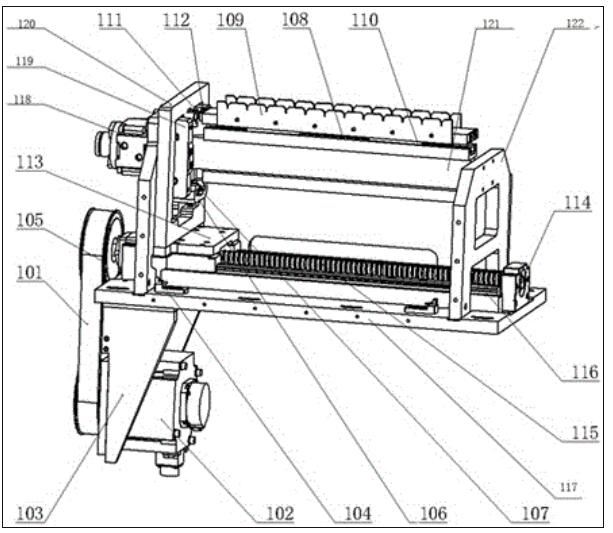
图2为本发明的上推单元结构示意图;
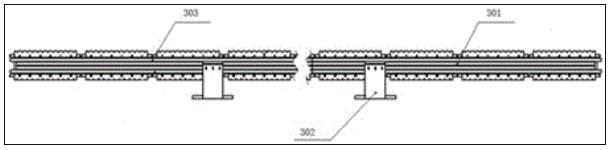
图3为本发明的传动单元结构示意图;
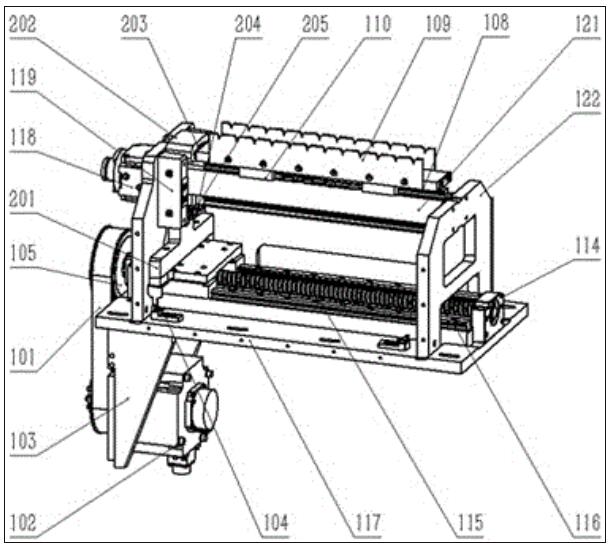
图4为本发明的下推单元结构示意图。
零件说明:
1、上推单元,101、传动皮带,102、伺服传动电机,103、推块固定板,104、感应开关装置,105、同步带轮,106、滑台尼龙顶块A,107、接近开关A,108、固定滑轨,109、模块胎具,110、推块滑块,111、推块限位块A,112、接近开关B,113、推块固定板,114、滑轨固定座板,115、滚珠传动丝杠,116、传动滑轨A,117、传动主轴底板;118、翻转气缸,119、翻转限位座,120、推块上推板,121、翻转电机主轴,122、转轴支撑端轴承座,2、下推单元,201、推块下推板,202、滑台尼龙顶块B,203、接近开关C,204、推块限位块,205、接近开关D,3、传动单元,301、主架梁托,302、主架固定座,303、传动滑轨。
具体实施方式
为了更好地理解与实施,下面结合附图对本发明作进一步描述:医用导管模块推块传动机构,包括上推单元1和下推单元2,上推单元1和下推单元2之间设有传动单元3,上推单元1包括推块传动装置和模块翻转装置,推块传动装置包括传动主轴底板117,传动主轴底板117下方设有电机固定架103,伺服传动电机102通过电机固定架103固定在传动主轴底板117上,传动主轴底板117上方设有传动滑轨A116,传动滑轨A116上方左端设有推块固定板113,传动滑轨A116右端固定在滑轨固定座板114上,滚珠传动丝杠115固定在推块固定板113上,滚珠传动丝杠115一端与同步带轮105相连接,同步带轮105通过传动皮带101与伺服传动电机102相连,滚珠传动丝杠115与伺服传动电机102之间通过齿轮链条实现共同运动,推块固定板113上设有推块上推板203;
模块翻转装置包括推块上推板120,推块上推板120内侧上端固定设有两个推块限位块A111,推块限位块A111中间设有接近开关B112,传动主轴底板117上端左右两侧均设有转轴支撑端轴承座205,右侧转轴支撑端轴承座122与推块上推板120之间设有翻转电机主轴121,翻转电机主轴121左端穿过推块上推板120与翻转气缸118相连,翻转电机主轴121上设有固定滑轨108,固定滑轨108上设有推块滑块110和模块胎具109,推块滑块110推动模块胎具109前行,推块上推板120内侧两端设有翻转限位座119,翻转电机主轴121下方、推块上推板120上固定设有滑台尼龙顶块A106,其中间设有接近开关A107,推块上推板120左下方设有光电感应开关装置104。伺服传动电机102转动通过传动皮带101带动滚珠传动丝杠115转动,带动推块固定板113上的推块上推板120在传动滑轨A116上运动,推动模块胎具109通过推块固定板113实现在固定滑轨108上推块传动这一动作。
所述下推单元2与与上推单元1的结构几乎相同,不同之处在于推块固定板上的推块下推板201最上方设有滑台尼龙顶块B202,其中间设有接近开关C203,推块下推板201内侧中部设有两个推块限位块B204,推块限位块B204上设有接近开关D205。伺服电机转动通过传动皮带带动滚珠传动丝杠转动,带动推块固定板上的推块下推板201,推块下推板201在传动滑轨上运动,推动模块胎具通过推块滑块实现在固定滑轨上推块传动运动这一动作。
传动单元,主要包括主架梁托301、主梁固定架302、传动滑轨B303、滑动胎具,主梁固定架302固定在主架梁托301上,根据设备的需求,主架梁托301有相应的长度,从而决定主梁固定架302的个数,主梁固定架302的主要作用是支撑主架梁托301,确保模块传动安全稳定的传动。主架梁托301上设有传动滑轨B303,传动滑轨B303上端与上推单元1的传动滑轨A116相连接,下端与下推单元2的传动滑轨相连接,上部滑轨承载由上推单元从上部推出的模块胎具运动,下部滑轨承载由下推单元从另一侧下部推出的模块胎具运动。
准备相应的plc自动控制系统,把伺服电机等电器元件的相关参数输入到plc控制系统中。
动作原理:在整个机器开始运动时,程序设定有一个空载运动过程,防止模块胎具上有尚未处理掉的余料。正常运动时,模块胎具109运动到第一个工位上管工位指定位置时,该工位自动上导管,导管卡在模块胎具109上,第一个工位动作完成后,模块推块传动机构受程序控制,进行下一步动作,模块胎具109继续向前走,此时,整个传输单元带着模块胎具109向前运动,此时上推单元1的接近开关B112感应不到胎具存在,通过程序控制,模块胎具109在翻转电机主轴121下方触碰接近开关A107后,翻转气缸118接收到信号,通过带动翻转电机主轴121翻转180°,实现模块胎具109从下到上的翻转动作。模块胎具109翻转上去的同时,伺服传动电机102接收到信号,通过同步带轮105带动滚珠传动丝杠115运动,滚动传动丝杠115与推块固定板113连接,带动固定在推块固定板113上的推块上推板120推动模块,通过电机与同步带轮同步运动,实现模块胎具的推进,另一端下推单元2的推块下推板201上部固定有滑台尼龙顶块B202,顶块中间安装有接近开关C203,当模块胎具运动到与滑台尼龙顶块B202接触的时候,接近开关C203起到作用,模块胎具运动到位,上推单元1的滚珠传动丝杠115、伺服传动电机102等回到原点,完成第一次的模块推块传动的上推动作。
下推单元2运动时,当来自上推单元1运动结束时传动过来的模块胎具,在翻转电机主轴121上方触碰接近开关C203后,翻转气缸接收到信号,通过带动翻转电机主轴翻转180°,实现模块胎具从上到下的翻转动作。模块胎具翻转下来的同时,伺服传动电机接收到信号,通过同步带轮带动滚珠传动丝杠运动,滚动传动丝杠与推块固定板连接,带动固定在推块固定板上的推板下推板201推动模块,通过电机与同步带轮同步运动,实现模块胎具的推进,另一端上推单元1的推块上推板部位固定有滑台尼龙顶块A120,顶块中间安装有接近开关A112,当模块胎具运动到与滑台尼龙顶块A120接触的时候,接近开关A112起到作用,模块胎具运动到位,下推单元2的滚珠传动丝杠、电机等回到原点,完成第一次的模块推动传动的下推动作。
综合以上所述,该机构的运动原理是:在整个机器开始运动时,程序设定有一个空载运动过程,防止模块胎具上有尚未处理掉的余料。正常运动时,模块胎具运动到第一个工位上管工位指定位置时(此时,模块推块传动机构的另一端的下推单元顶部的固定滑轨处没有模块胎具),该工位自动上导管,导管卡在模块胎具的管夹板的卡槽里,第一个工位动作完成后,模块推块传动机构受程序控制,进行下一步动作,模块胎具继续向前走,此时,整个传输单元带着模块胎具向前运动(目前状态上推单元上部是没有胎具的,另一端的下推单元上部滑轨上有模块胎具),此时上推单元的接近开关B感应到胎具不存在,通过程序控制,模块胎具在翻转电机主轴下方触碰接近开关A后,翻转气缸接收到信号,通过带动翻转电机主轴翻转180°,实现模块胎具从下到上的翻转动作。模块胎具翻转上去的同时,伺服传动电机接收到信号,通过同步带轮带动滚珠传动丝杠运动,滚动传动丝杠与推块固定板连接,带动固定在推块固定板上的推块下推板推动模块,通过伺服传动电机与同步带轮同步运动,实现模块胎具的推进动作。而在上推单元翻转运动的同时,下推单元上部滑轨上的模块胎具在触碰接近开关C后,翻转气缸接收到信号,通过带动翻转电机主轴翻转180°,实现模块胎具从上到下的翻转动作。上推单元与下推单元同时运动、同时结束,两个单元同时运动才能完成一次完整的模块推块传动。

Copyright © 宁波鄞州盖奇同步带轮有限公司 2007-2022 All Rights Reserved.
电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:浙江省宁波市鄞州区姜山镇蔡郎桥村姜南路39-2 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持 浙公网安备33021202003319号
电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:浙江省宁波市鄞州区姜山镇蔡郎桥村姜南路39-2 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持 浙公网安备33021202003319号