产品搜索
当前位置:首页->一种移动平台
一种移动平台
【申请公布号:CN110901787A;申请权利人:太原科技大学; 山西省机电设计研究院;发明设计人:成俊秀; 段云锐; 马红滨; 陈晔; 张德棒; 张恭腾; 王磊; 贾航澳; 郭智峰;】
摘要:
本发明公开了一种移动平台,属于物料输送技术领域,解决麦克纳姆轮全向移动平台不能上台阶或上台阶不稳定的问题。一种移动平台,包括储物平台、前腿、后腿、驱动轮、提升主动轮;驱动轮设置在储物平台四个角的下部位置,储物平台上对称安装有提升滑槽,前腿和后腿分别滑动安装在提升滑槽内;前腿上设置有前腿从动带轮和前腿主动带轮,前腿主动带轮和前腿从动带轮通过同步带连接;后腿的顶部通过后腿连接杆连接,后腿连接杆设有后腿从动带轮,储物平台上设有后腿主动带轮,所述的后腿主动带轮通过后腿电机驱动;提升主动轮设置在两条前腿和后腿的底端。本发明提升过程稳定,占用空间小,成本低,可推广应用于货物移动平台以及物料智能输送领域。
主权项:
1.一种移动平台,其特征在于,包括储物平台、前腿、后腿、驱动轮、提升主动轮;所述的驱动轮为四个,分别设置在储物平台四个角的下部位置,所述的储物平台上对称安装有两对提升滑槽,两条前腿和后腿分别滑动安装在提升滑槽的空腔内;所述前腿上设置有前腿从动带轮和前腿主动带轮,前腿从动带轮设置在前腿的上部,前腿主动带轮设置在提升滑槽的下部,前腿主动带轮和前腿从动带轮通过同步带连接,形成前腿左侧同步带组件和前腿右侧同步带组件,所述两个前腿主动带轮由设置在储物平台下部的前腿电机驱动;所述两条后腿的顶部通过后腿连接杆连接固定,所述的后腿连接杆的中间位置设置有后腿从动带轮,所述的储物平台上设置有后腿主动带轮,后腿主动带轮和后腿从动带轮通过同步带连接形成后腿同步带组件,所述的后腿主动带轮通过后腿电机驱动;所述的提升主动轮为四个,分别设置在两条前腿和后腿的底端,提升主动轮固定在联轴器的法兰端,其中前腿下部的联轴器与前腿电机连接,后腿下部的联轴器与后腿电机连接。
1.一种移动平台,其特征在于,包括储物平台、前腿、后腿、驱动轮、提升主动轮;
所述的驱动轮为四个,分别设置在储物平台四个角的下部位置,所述的储物平台上对称安装有两对提升滑槽,两条前腿和后腿分别滑动安装在提升滑槽的空腔内;
所述前腿上设置有前腿从动带轮和前腿主动带轮,前腿从动带轮设置在前腿的上部,前腿主动带轮设置在提升滑槽的下部,前腿主动带轮和前腿从动带轮通过同步带连接,形成前腿左侧同步带组件和前腿右侧同步带组件,所述两个前腿主动带轮由设置在储物平台下部的前腿电机驱动;
所述两条后腿的顶部通过后腿连接杆连接固定,所述的后腿连接杆的中间位置设置有后腿从动带轮,所述的储物平台上设置有后腿主动带轮,后腿主动带轮和后腿从动带轮通过同步带连接形成后腿同步带组件,所述的后腿主动带轮通过后腿电机驱动;
所述的提升主动轮为四个,分别设置在两条前腿和后腿的底端,提升主动轮固定在联轴器的法兰端,其中前腿下部的联轴器与前腿电机连接,后腿下部的联轴器与后腿电机连接。
2.根据权利要求1所述的一种移动平台,其特征在于,所述的驱动轮为麦克纳姆轮。
3.根据权利要求1或2所述的一种移动平台,其特征在于,所述的提升滑槽包括一个空腔和一个滑槽,所述的空腔内设置有滚轮,空腔壁上开设有限位孔。
4.根据权利要求1或2所述的一种移动平台,其特征在于,所述的前腿从动带轮和前腿主动带轮分别通过设置在前腿上的带轮固定器安装在前腿的上部和下部,所述的后腿从动带轮和后腿主动带轮安装在后腿连接杆和储物平台上的带轮固定器上。
5.根据权利要求1或2所述的一种移动平台,其特征在于,所述的前腿和后腿上分别设置有用于分别连接同步带前腿和后腿的同步带压板。
6.根据权利要求1或2所述的一种移动平台,其特征在于,所述的储物平台上设置有红外传感器和限位开关,所述的红外传感器分别与前腿电机、后腿电机、和限位开关电连接。
7.根据权利要求1或2所述的一种移动平台,其特征在于,所述的提升滑槽空腔与前腿、后腿过盈量为0.1。
8.根据权利要求1或2所述的一种移动平台,其特征在于,所述的储物平台上设置有底板,前腿电机和后腿电机分别设置在两个电机固定座,两个电机固定座设置在底板上。
一种移动平台
技术领域
本发明属于物料输送技术领域,涉及一种移动平台。
背景技术
麦克纳姆轮移动平台是一种全向移动平台,这种平台可以全向移动且运动精度较高,可以实现前行、横移、斜行、旋转及其组合等运动方式,非常适合转运空间有限、作业通道狭窄的作业环境,因此,由于其快速灵活的特性,可广泛推广应用于工业加工和物流搬运场合。
但是现有的采用麦克纳姆轮全向移动平台需要在平坦且光洁的地面上使用,所以当作业环境不平整,需要上台阶,或者有较低门槛等情况时,都会影响移动平台的正常运行,从而使得麦克纳姆轮平台的工作范围和寿命都受到极大限制和考验,无法适应复杂的工况环境。
为了解决现有麦克纳姆轮移动平台存在的不能上台阶,只能在平坦地面运行的缺陷,本发明研发了一种移动平台。
发明内容
本发明的目的在于提供一种移动平台,解决麦克纳姆轮全向移动平台遇到台阶不能上台阶或上台阶不稳定的问题。
本发明是通过以下技术方案实现的:
一种移动平台,包括储物平台、前腿、后腿、驱动轮、提升主动轮;
所述的驱动轮为四个,分别设置在储物平台四个角的下部位置,所述的储物平台上对称安装有两对提升滑槽,两条前腿和后腿分别滑动安装在提升滑槽的空腔内;
所述前腿上设置有前腿从动带轮和前腿主动带轮,前腿从动带轮设置在前腿的上部,前腿主动带轮设置在提升滑槽的下部,前腿主动带轮和前腿从动带轮通过同步带连接,形成前腿左侧同步带组件和前腿右侧同步带组件,所述两个前腿主动带轮由设置在储物平台下部的前腿电机驱动;
所述两条后腿的顶部通过后腿连接杆连接固定,所述的后腿连接杆的中间位置设置有后腿从动带轮,所述的储物平台上设置有后腿主动带轮,后腿主动带轮和后腿从动带轮通过同步带连接形成后腿同步带组件,所述的后腿主动带轮通过后腿电机驱动;
所述的提升主动轮为四个,分别设置在两条前腿和后腿的底端,提升主动轮固定在联轴器的法兰端,其中前腿下部的联轴器与前腿电机连接,后腿下部的联轴器与后腿电机连接。
进一步地,所述的驱动轮为麦克纳姆轮,本发明为一种基于麦克纳姆轮的移动平台。
所述的提升滑槽包括一个空腔和一个滑槽,所述的空腔内设置有滚轮,空腔壁上开设有限位孔。
所述的前腿从动带轮和前腿主动带轮分别通过设置在前腿上的带轮固定器安装在前腿的上部和下部,所述的后腿从动带轮和后腿主动带轮安装在后腿连接杆和储物平台上的带轮固定器上。
所述的前腿和后腿上分别设置有用于分别连接同步带前腿和后腿的同步带压板。
所述的储物平台上设置有红外传感器和限位开关,所述的红外传感器分别与前腿电机、后腿电机、和限位开关电连接,限位开关能够精确控制前腿和后腿抬升的高度,红外传感器能够检测到上岛情况,保证整个上岛过程顺利进行。
所述的提升滑槽空腔与前腿、后腿过盈量为0.1,通过与前腿和后腿配合,保证了直线运动的稳定性。
所述的储物平台上设置有底板,前腿电机和后腿电机分别设置在两个电机固定座,两个电机固定座设置在底板上。
本发明移动平台工作过程如下:当移动平台遇到台阶等障碍物时,前腿同步带轮组件和后腿同步带轮组件在驱动电机的驱动下,使得前腿和后腿会伸出一定的高度,将移动平台上升到一定高度时,移动平台在提升主动轮的驱动下向前行驶,当移动平台的前轮到达台阶上时,前腿驱动电机开始驱动前腿同步带组件,使得前腿收缩,移动平台在提升主动轮的驱使下继续向前行驶,当移动平台的后轮到达台阶上时,后腿驱动电机开始驱动后腿同步带组件,使得后腿开始收缩,收缩完成后,整个移动平台完全达到台阶上,完成提升过程;在储物平台上固定限位开关和红外传感器,限位开关能够精确控制前腿和后腿抬升的高度,红外传感器能够检测到提升,保证整个提升过程顺利进行。
与现有技术相比,本发明具有以下有益效果:
1)本发明通过设置的前腿和后腿,在尽可能减少空间占用的情况下能够做到移动平台的平稳提升;
2)本发明通过设置提升滑槽,使得前腿和后腿在抬升过程中更稳定,成本低;
3)通过设置限位开关,使得前腿和后腿在提升过程中保持高度精确;
4)通过设置红外传感器,使得前轮在提升后能够精确检测到,保证了整个提升过程的顺利进行。
本发明提升过程稳定,占用空间小,成本低,可推广应用于货物移动平台以及物料智能输送领域。
附图说明
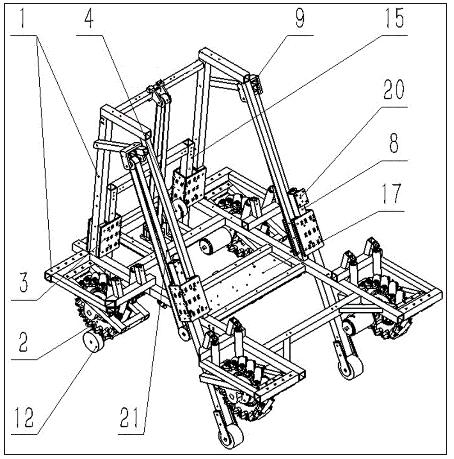
图1是本发明结构示意图;
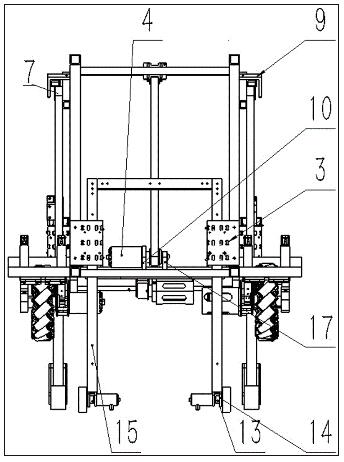
图2是图1的后视图;
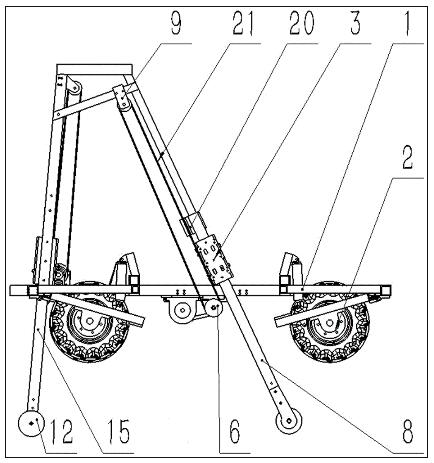
图3是图1的侧视图;
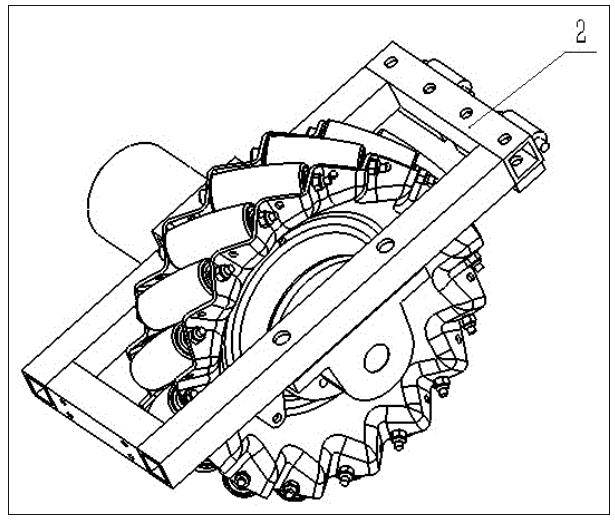
图4是本发明驱动轮的结构示意图;
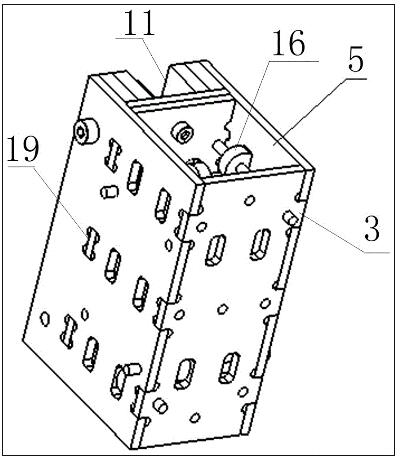
图5是提升滑槽的结构示意图;
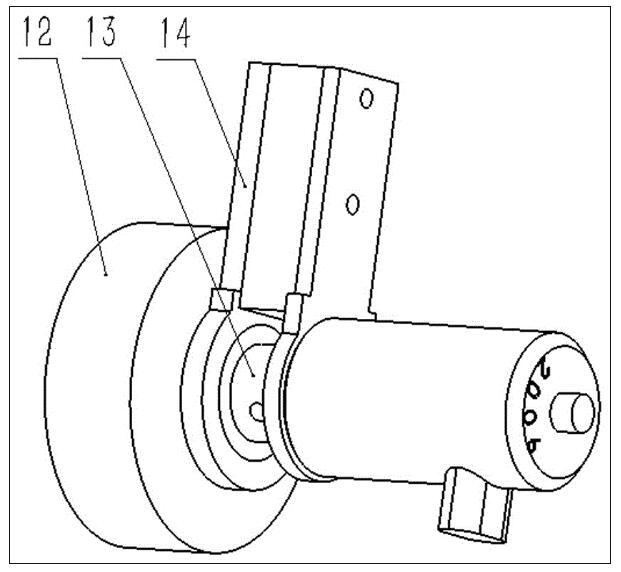
图6为提升主动轮的结构示意图。
图中:1-储物平台、2-驱动轮、3-提升滑槽、4-后腿电机驱动、5-空腔、6-前腿主动带轮、7-前腿从动带轮、8-前腿、9-带轮固定座、10-电机固定座, 11-滑槽,12-包胶轮,13-联轴器,14-固定座,15-后腿,16-滚轮 17-底板,18-限位开关,19-限位孔, 20-同步带压板,21-同步带。
具体实施方式
下面结合附图和实施例对本发明作进一步的描述。
如图1~6所示的一种移动平台,包括储物平台1、前腿8、后腿15、驱动轮2、提升主动轮;所述的驱动轮2为四个麦克纳姆轮,分别设置在储物平台1四个角的下部位置,所述的储物平台1上对称安装有两对提升滑槽3,两条前腿8和后腿15分别滑动安装在提升滑槽3的空腔内;所述前腿8上设置有前腿从动带轮7和前腿主动带轮6,前腿从动带轮7通过带轮固定器9设置在前腿8的上部,前腿主动带轮6通过带轮固定器设置在提升滑槽3的下部,前腿主动带轮6和前腿从动带轮7通过同步带21连接,形成前腿左侧同步带组件和前腿右侧同步带组件,所述两个前腿主动带轮6由设置在储物平台1底板上的前腿电机驱动,且前腿电机设置有电机固定座;所述两条后腿15的顶部通过后腿连接杆连接固定,所述的后腿连接杆的中间位置通过带轮固定器设置有后腿从动带轮,所述的储物平台上通过带轮固定器设置有后腿主动带轮,后腿主动带轮和后腿从动带轮通过同步带连接形成后腿同步带组件,所述的后腿主动带轮通过设置在底板上的后腿电机驱动,后腿电机设置有电机固定座;所述的前腿和后腿上分别设置有用于分别连接同步带前腿8和后腿15的同步带压板15;所述的提升主动轮12为四个包胶轮,分别设置在两条前腿8和后腿15的底端,提升主动轮为固定在联轴器13的法兰端,联轴器13固定在固定座14上,其中前腿下部的联轴器与前腿电机连接,后腿下部的联轴器与后腿电机连接。
所述的提升滑槽3结构如图5所示,包括一个空腔5和一个滑槽11,所述的空腔5内设置有滚轮16,空腔壁上开设有限位孔19,所述的空腔5与每条前腿和后腿的下腿的过盈量为0.1;其中在储物平台1上设置有红外传感器和限位开关18,所述的红外传感器分别与前腿电机、后腿电机、和限位开关电连接。

Copyright © 宁波鄞州盖奇同步带轮有限公司 2007-2022 All Rights Reserved.
电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:浙江省宁波市鄞州区姜山镇蔡郎桥村姜南路39-2 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持 浙公网安备33021202003319号
电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:浙江省宁波市鄞州区姜山镇蔡郎桥村姜南路39-2 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持 浙公网安备33021202003319号