产品搜索
当前位置:首页->一种自动驾驶测试车的驱动悬挂装置
一种自动驾驶测试车的驱动悬挂装置
【授权公告号:CN210603932U;申请权利人:中山神矶智能科技有限公司;发明设计人:蔡昂奇;】
摘要:
本实用新型公开了一种自动驾驶测试车的驱动悬挂装置。它包括支座、电机、摆臂、避震器、驱动轮、主同步带轮、从同步带轮和同步带,支座上设有第一通槽和第二通槽,摆臂顶端位于第一通槽内且通过第一转轴与支座铰接,电机的轴伸水平穿过支座侧壁伸入第二通槽,主同步带轮套设在电机的轴伸上,电机的轴伸与第一转轴同轴,驱动轮通过第二转轴与摆臂底端铰接,从同步带轮套设在第二转轴上,主同步带轮与从同步带轮通过同步带连接,摆臂中部设有第一通孔,避震器底端伸入第一通孔且与第一通孔内壁下部固定连接,避震器顶端伸入第一通槽且通过第三转轴与支座铰接。本实用新型设计成一级同步带传动,传动效率高,且同步带轮不易松动和脱落。
主权项:
1.一种自动驾驶测试车的驱动悬挂装置,其特征在于,包括支座(1)、电机(2)、摆臂(3)、避震器(4)、驱动轮(5)、主同步带轮(6)、从同步带轮(7)和同步带(8),所述支座(1)上并排设有竖直设置的第一通槽(9)和第二通槽(10),所述摆臂(3)顶端位于第一通槽(9)内且通过第一转轴(11)与支座(1)铰接,所述电机(2)水平设置在支座(1)外侧,所述第二通槽(10)位于第一通槽(9)和电机(2)之间,所述电机(2)的轴伸(12)水平穿过支座(1)侧壁伸入第二通槽(10),所述主同步带轮(6)套设在电机(2)的轴伸(12)上,所述电机(2)的轴伸(12)与第一转轴(11)同轴,所述驱动轮(5)通过第二转轴(13)与摆臂(3)底端铰接,所述从同步带轮(7)套设在第二转轴(13)上,所述主同步带轮(6)与从同步带轮(7)位于同一平面,所述主同步带轮(6)与从同步带轮(7)通过同步带(8)连接,所述摆臂(3)中部设有第一通孔(14),所述避震器(4)底端伸入第一通孔(14)且与第一通孔(14)内壁下部固定连接,所述避震器(4)顶端伸入第一通槽(9)且通过第三转轴(15)与支座(1)铰接。
要求:
1.一种自动驾驶测试车的驱动悬挂装置,其特征在于,包括支座(1)、电机(2)、摆臂(3)、避震器(4)、驱动轮(5)、主同步带轮(6)、从同步带轮(7)和同步带(8),所述支座(1)上并排设有竖直设置的第一通槽(9)和第二通槽(10),所述摆臂(3)顶端位于第一通槽(9)内且通过第一转轴(11)与支座(1)铰接,所述电机(2)水平设置在支座(1)外侧,所述第二通槽(10)位于第一通槽(9)和电机(2)之间,所述电机(2)的轴伸(12)水平穿过支座(1)侧壁伸入第二通槽(10),所述主同步带轮(6)套设在电机(2)的轴伸(12)上,所述电机(2)的轴伸(12)与第一转轴(11)同轴,所述驱动轮(5)通过第二转轴(13)与摆臂(3)底端铰接,所述从同步带轮(7)套设在第二转轴(13)上,所述主同步带轮(6)与从同步带轮(7)位于同一平面,所述主同步带轮(6)与从同步带轮(7)通过同步带(8)连接,所述摆臂(3)中部设有第一通孔(14),所述避震器(4)底端伸入第一通孔(14)且与第一通孔(14)内壁下部固定连接,所述避震器(4)顶端伸入第一通槽(9)且通过第三转轴(15)与支座(1)铰接。
2.根据权利要求1所述的一种自动驾驶测试车的驱动悬挂装置,其特征在于,所述摆臂(3)通过第一滚动轴承(16)与第一转轴(11)连接。
3.根据权利要求1所述的一种自动驾驶测试车的驱动悬挂装置,其特征在于,所述摆臂(3)底端设有从上至下贯穿摆臂(3)的第三通槽(17),所述驱动轮(5)位于第三通槽(17)内,所述第二转轴(13)水平穿过第三通槽(17)的两侧壁,所述从同步带轮(7)位于摆臂(3)外侧。
4.根据权利要求3所述的一种自动驾驶测试车的驱动悬挂装置,其特征在于,所述第三通槽(17)的侧壁通过第二滚动轴承(25)与第二转轴(13)连接。
5.根据权利要求1所述的一种自动驾驶测试车的驱动悬挂装置,其特征在于,还包括张紧轮(18)和用于调整张紧轮(18)高低位置的张紧轮调整机构,所述张紧轮(18)设置在同步带上且将同步带(8)张紧。
6.根据权利要求5所述的一种自动驾驶测试车的驱动悬挂装置,其特征在于,所述张紧轮调整机构位于摆臂(3)和同步带(8)之间,所述张紧轮调整机构包括调整臂(19)、调整拉杆(20)、安装块(21)和调节螺母(22),所述调整臂(19)底端与摆臂(3)铰接,所述调整臂(19)顶端与张紧轮(18)铰接,所述安装块(21)设置在摆臂(3)上,所述安装块(21)内设有供调整拉杆(20)穿过的第二通孔,所述调节螺母(22)设置在安装块(21)上且可绕第二通孔的中轴线转动,所述调节螺母(22)的螺纹孔与第二通孔同轴,所述调整拉杆(20)上部设有螺纹段,所述螺纹段穿过第二通孔并与调节螺母(22)螺纹连接,所述调整拉杆(20)底端与调整臂(19)中部铰接。
7.根据权利要求1所述的一种自动驾驶测试车的驱动悬挂装置,其特征在于,还包括罩住从同步带轮(7)和同步带(8)的护罩(23),所述护罩(23)与摆臂(3)固定连接。
8.根据权利要求5所述的一种自动驾驶测试车的驱动悬挂装置,其特征在于,还包括罩住从同步带轮(7)和同步带(8)的护罩(23),所述护罩(23)与摆臂(3)固定连接,所述护罩(23)上设有供张紧轮(18)穿过的缺口(24)。
9.根据权利要求1所述的一种自动驾驶测试车的驱动悬挂装置,其特征在于,所述第一转轴(11)与支座(1)可拆卸连接,所述第三转轴(15)与支座(1)可拆卸连接。
10.根据权利要求4所述的一种自动驾驶测试车的驱动悬挂装置,其特征在于,所述第二滚动轴承(25)与其所在的第三通槽(17)侧壁可拆卸连接。
一种自动驾驶测试车的驱动悬挂装置
技术领域
本实用新型涉及悬挂技术领域,尤其涉及一种自动驾驶测试车的驱动悬挂装置。
背景技术
随着计算机技术以及人工智能技术的近年来的迅猛发展,无人驾驶技术是目前各方正在研发的热门技术之一。在汽车制造商推出商用无人驾驶汽车之前,必然要进行各种各样的测试,才能保证无人驾驶汽车上路安全。为了测试无人驾驶汽车的安全可靠性,必须要在测试场内模拟交通路况,使得测试路况与真实路况情况基本一致,如模拟行人、模拟非机动车以及机动车在各种路况下的驾驶环境。
为了保证测试的安全性,防止被测试车因碰撞损坏,行人、非机动车、机动车等都采用模型代替。目前一般采用自动驾驶测试车搭载行人模型、非机动车模型机动车模型按照设定的路线移动,模拟各种路况下的驾驶环境。现有自动驾驶测试车的驱动悬挂装置采用双级同步带传动,同步带轮很容易松动和脱落,且二级传动效率更低,而减速比却未提高,结构复杂,制造成本高。
发明内容
本实用新型为了解决上述技术问题,提供了一种自动驾驶测试车的驱动悬挂装置,其设计成一级同步带传动,传动效率高,结构简单,且同步带轮不易松动和脱落。
为了解决上述问题,本实用新型采用以下技术方案予以实现:
本实用新型的一种自动驾驶测试车的驱动悬挂装置,包括支座、电机、摆臂、避震器、驱动轮、主同步带轮、从同步带轮和同步带,所述支座上并排设有竖直设置的第一通槽和第二通槽,所述摆臂顶端位于第一通槽内且通过第一转轴与支座铰接,所述电机水平设置在支座外侧,所述第二通槽位于第一通槽和电机之间,所述电机的轴伸水平穿过支座侧壁伸入第二通槽,所述主同步带轮套设在电机的轴伸上,所述电机的轴伸与第一转轴同轴,所述驱动轮通过第二转轴与摆臂底端铰接,所述从同步带轮套设在第二转轴上,所述主同步带轮与从同步带轮位于同一平面,所述主同步带轮与从同步带轮通过同步带连接,所述摆臂中部设有第一通孔,所述避震器底端伸入第一通孔且与第一通孔内壁下部固定连接,所述避震器顶端伸入第一通槽且通过第三转轴与支座铰接。
在本方案中,支座呈E字形,第一通槽用于容纳摆臂转动中心端,第二通槽用于容纳主同步带轮和电机的轴伸。摆臂可绕支座上的第一转轴转动,由于电机的轴伸与第一转轴同轴,所以当摆臂转动时,主同步带轮、从同步带轮、同步带都能够随摆臂一起同步转动,从而不影响传动功能。
驱动轮向上运动时,避震器弹簧被压缩,摆臂绕第一转轴转动,避震器绕第三转轴转动,车体重量通过支座、摆臂和避震器传递到车轮上。电机转动带动主同步带轮转动,主同步带轮带动从同步带轮转动,从同步带轮带动驱动轮转动,本方案设计成一级同步带传动,传动效率高,结构简单,且同步带轮不易松动和脱落。
作为优选,所述摆臂通过第一滚动轴承与第一转轴连接。
作为优选,所述摆臂底端设有从上至下贯穿摆臂的第三通槽,所述驱动轮位于第三通槽内,所述第二转轴水平穿过第三通槽的两侧壁,所述从同步带轮位于摆臂外侧。
作为优选,所述第三通槽的侧壁通过第二滚动轴承与第二转轴连接。
作为优选,所述一种自动驾驶测试车的驱动悬挂装置还包括张紧轮和用于调整张紧轮高低位置的张紧轮调整机构,所述张紧轮设置在同步带上且将同步带张紧。张紧轮用于张紧同步带,保证传动效率。
作为优选,所述张紧轮调整机构位于摆臂和同步带之间,所述张紧轮调整机构包括调整臂、调整拉杆、安装块和调节螺母,所述调整臂底端与摆臂铰接,所述调整臂顶端与张紧轮铰接,所述安装块设置在摆臂上,所述安装块内设有供调整拉杆穿过的第二通孔,所述调节螺母设置在安装块上且可绕第二通孔的中轴线转动,所述调节螺母的螺纹孔与第二通孔同轴,所述调整拉杆上部设有螺纹段,所述螺纹段穿过第二通孔并与调节螺母螺纹连接,所述调整拉杆底端与调整臂中部铰接。
张紧轮调整机构能够在摆臂摆动时实时调整张紧轮位置,使得张紧轮始终张紧同步带。用户可通过调节螺母调整张紧轮与同步带的相对位置,使张紧轮张紧同步带。
作为优选,所述一种自动驾驶测试车的驱动悬挂装置还包括罩住从同步带轮和同步带的护罩,所述护罩与摆臂固定连接。
作为优选,所述一种自动驾驶测试车的驱动悬挂装置还包括罩住从同步带轮和同步带的护罩,所述护罩与摆臂固定连接,所述护罩上设有供张紧轮穿过的缺口。
作为优选,所述第一转轴与支座可拆卸连接,所述第三转轴与支座可拆卸连接。便于拆卸维修。
作为优选,所述第二滚动轴承与其所在的第三通槽侧壁可拆卸连接。便于拆卸维修。
本实用新型的有益效果是:采用一级同步带传动,传动效率高,结构简单,且同步带轮不易松动和脱落,避震器随摆臂转动,避震效果好,张紧轮随摆臂转动,始终张紧同步带。
附图说明
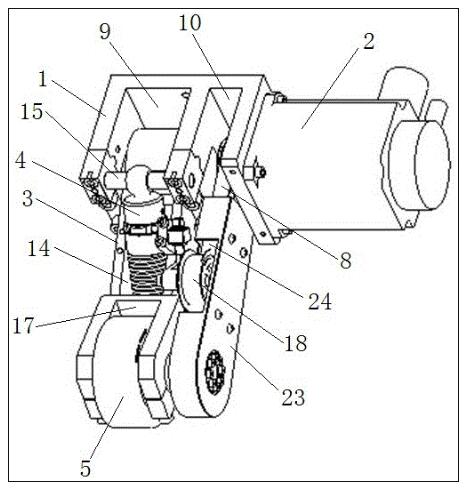
图1是实施例的结构示意图;
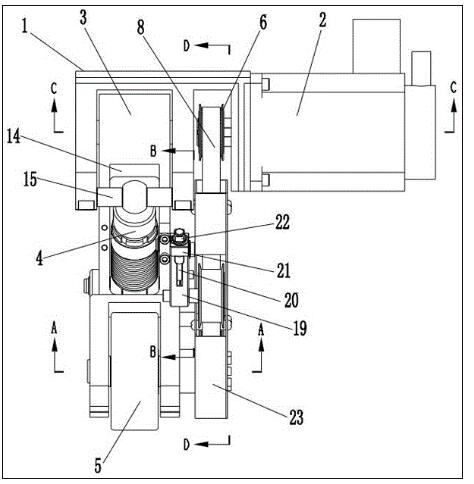
图2是实施例的俯视图;
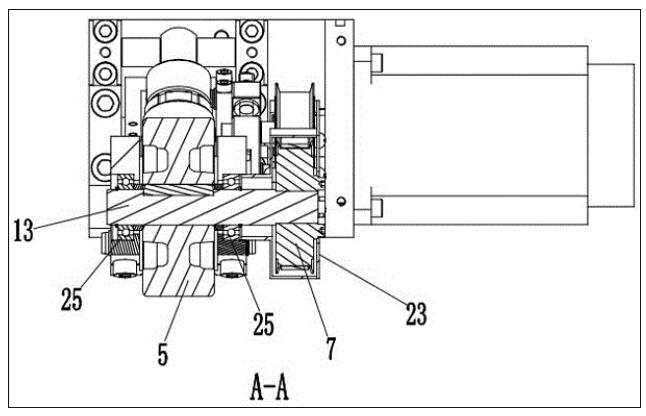
图3是图2的A-A剖视图;
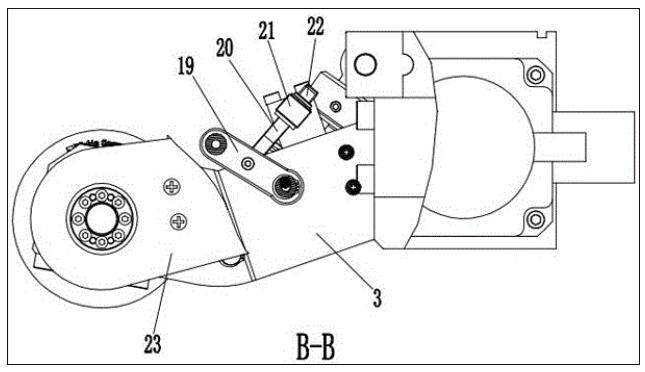
图4是图2的B-B剖视图;
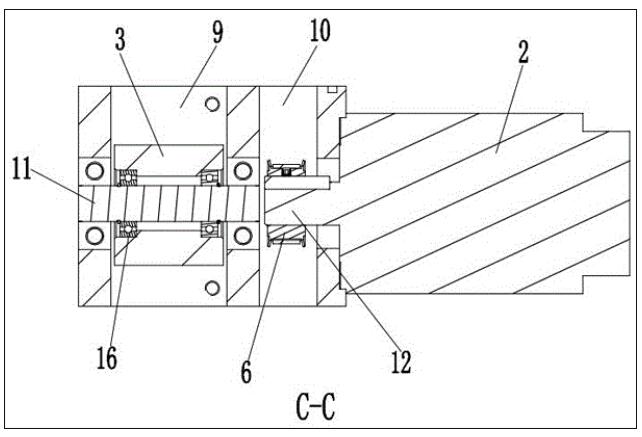
图5是图2的C-C剖视图;
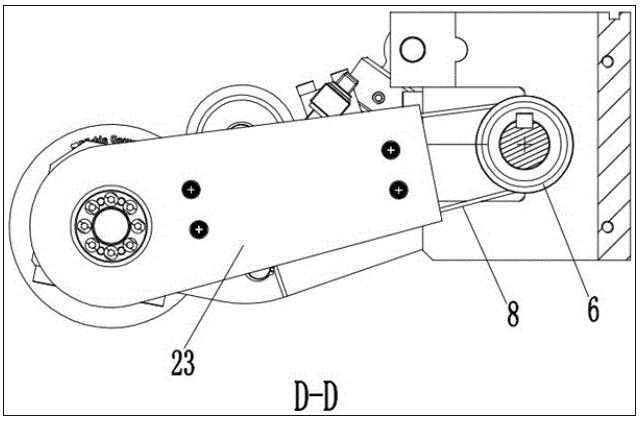
图6是图2的D-D剖视图;
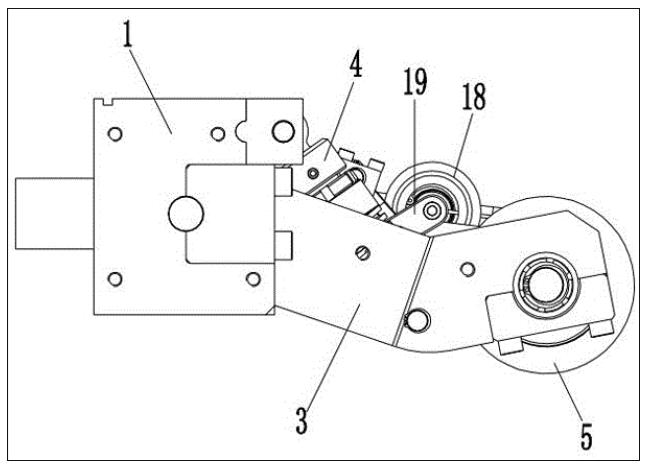
图7是实施例的左视图。
图中:1、支座,2、电机,3、摆臂,4、避震器,5、驱动轮,6、主同步带轮,7、从同步带轮,8、同步带,9、第一通槽,10、第二通槽,11、第一转轴,12、轴伸,13、第二转轴,14、第一通孔,15、第三转轴,16、第一滚动轴承,17、第三通槽,18、张紧轮,19、调整臂,20、调整拉杆,21、安装块,22、调节螺母,23、护罩,24、缺口,25、第二滚动轴承。
具体实施方式
下面通过实施例,并结合附图,对本实用新型的技术方案作进一步具体的说明。
实施例:本实施例的一种自动驾驶测试车的驱动悬挂装置,如图1、图2、图3、图4、图5、图6、图7所示,包括支座1、电机2、摆臂3、避震器4、驱动轮5、主同步带轮6、从同步带轮7、同步带8、张紧轮18和用于调整张紧轮18高低位置的张紧轮调整机构,支座1上并排设有竖直设置的第一通槽9和第二通槽10,摆臂3顶端位于第一通槽9内且通过第一转轴11与支座1铰接,电机2水平设置在支座1外侧,第二通槽10位于第一通槽9和电机2之间,电机2的轴伸12水平穿过支座1侧壁伸入第二通槽10,主同步带轮6套设在电机2的轴伸12上,电机2的轴伸12与第一转轴11同轴,摆臂3底端设有从上至下贯穿摆臂的第三通槽17,驱动轮5位于第三通槽17内,驱动轮5通过第二转轴13与摆臂3铰接,第二转轴13水平穿过第三通槽17的两侧壁,从同步带轮7套设在第二转轴13上,从同步带轮7位于摆臂3外侧,主同步带轮6与从同步带轮7位于同一平面,主同步带轮6与从同步带轮7通过同步带8连接,摆臂3中部设有第一通孔14,避震器4底端伸入第一通孔14且与第一通孔14内壁下部固定连接,避震器4顶端伸入第一通槽9且通过第三转轴15与支座1铰接。
张紧轮18设置在同步带8上且将同步带8张紧,张紧轮调整机构位于摆臂3和同步带8之间,张紧轮调整机构包括调整臂19、调整拉杆20、安装块21和调节螺母22,调整臂19底端与摆臂3铰接,调整臂19顶端与张紧轮18铰接,安装块21设置在摆臂3上,安装块21内设有供调整拉杆20穿过的第二通孔,调节螺母22设置在安装块21上且可绕第二通孔的中轴线转动(安装块顶面设有与第二通孔同轴的环形轨道以及可沿环形轨道滑动的滑块,调节螺母与滑块固定连接),调节螺母22的螺纹孔与第二通孔同轴,调整拉杆20上部设有螺纹段,螺纹段穿过第二通孔并与调节螺母22螺纹连接,调整拉杆20底端与调整臂19中部铰接。
自动驾驶测试车的驱动悬挂装置还包括罩住从同步带轮7和同步带8的护罩23,护罩23与摆臂3固定连接,护罩23上设有供张紧轮18穿过的缺口24。
摆臂3通过第一滚动轴承16与第一转轴11连接。第三通槽17的侧壁通过第二滚动轴承25与第二转轴13连接。第一转轴11与支座1可拆卸连接,第三转轴15与支座1可拆卸连接,第二滚动轴承25与其所在的第三通槽17侧壁可拆卸连接,便于拆卸维修。
在本方案中,支座呈E字形,第一通槽用于容纳摆臂转动中心端,第二通槽用于容纳主同步带轮和电机的轴伸。摆臂可绕支座上的第一转轴转动,由于电机的轴伸与第一转轴同轴,所以当摆臂转动时,主同步带轮、从同步带轮、同步带都能够随摆臂一起同步转动,从而不影响传动功能。
驱动轮向上运动时,避震器弹簧被压缩,摆臂绕第一转轴转动,避震器绕第三转轴转动,车体重量通过支座、摆臂和避震器传递到车轮上。电机转动带动主同步带轮转动,主同步带轮带动从同步带轮转动,从同步带轮带动驱动轮转动,本方案设计成一级同步带传动,传动效率高,结构简单,且同步带轮不易松动和脱落。
张紧轮用于张紧同步带,保证传动效率。张紧轮调整机构能够在摆臂摆动时实时调整张紧轮位置,使得张紧轮始终张紧同步带。用户可通过调节螺母调整张紧轮与同步带的相对位置,使张紧轮张紧同步带。

Copyright © 宁波鄞州盖奇同步带轮有限公司 2007-2022 All Rights Reserved.
电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:浙江省宁波市鄞州区姜山镇蔡郎桥村姜南路39-2 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持 浙公网安备33021202003319号
电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:浙江省宁波市鄞州区姜山镇蔡郎桥村姜南路39-2 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持 浙公网安备33021202003319号