��Ʒ����
��ǰλ��:��ҳ->һ�ֿ�ʵ��������ͣ����ģʽ�IJ��ٿɵ���������װ��
һ�ֿ�ʵ��������ͣ����ģʽ�IJ��ٿɵ���������װ��
���빫���ţ�CN111494167A������Ȩ���ˣ� ������ְҵ��ѧ;��������ˣ� ������; �쿡; ½�ϱ�; ����Ȩ; ��ʿ��; ������; ��ͬͬ;��
ժҪ��
�������ṩ��һ�ֿ�ʵ��������ͣ����ģʽ�IJ��ٿɵ���������װ�ã�������װ�ܣ���װ�ܵ�ǰ�లװ���������������������л��ǣ������������ᣬ�������������������д����а塢ͬ������A���Ӷ��֡�˫���֡������ֺ����֣��Ӷ��ֵ��ڲ��¶����е���B�͵���A��˫���ֵ��в���ϰ�װ�д����̶ֹ����������̶ֹ�������ϰ�װ�д����֣�˫���ֵ��Ϸ�������ͬ������B����ͬ������B���ڶ���ͬ������A�������ӣ�λ��ǰ���ͬ������B��������м�צB��λ�ں���ͬ������B��������м�צA����צB�ͼ�צA���Ϸ��ֱ����е����B�͵����A�����������������Ⱥ�峤ʱ�������������⣬����������ͣ�����ٿɵ�����ȫ�ɿ����ɱ��͵��ŵ㡣
��Ȩ�
1.һ�ֿ�ʵ��������ͣ����ģʽ�IJ��ٿɵ���������װ�ã����������ڣ�������װ�ܣ�1����������װ�ܣ�1����ǰ����ϰ�װ����������15������������Գ����л��ǣ�3�����������ǣ�3��������ˮƽ���õ��ᣨ46���������ᣨ46�������������������д����а壨4����ͬ������A��59�����Ӷ��֣�6����˫���֣�63���������֣�65�������֣�66�����ᣨ46�����ڶ����й�����У�47�������������а壨4�����϶�ͨ���ڶ��̶���˨��58����ͬ������ A��59�����ӣ�����ͬ������A��59����Ӷ��֣�6��֮��������У�45�����Ӷ��֣�6�����ڲ��¶�������ǰ��Գ����õĵ���B��62���͵���A��61������������B��62���͵���A��61���������а壨4�����϶���λ���У�����˫���֣�63�����в���ϰ�װ�д����̶ֹ�����69�������������̶ֹ�����69�������������ᣨ46������Բ������Բ�����������������������ĸ�֧�ˣ�֧����Բ�����ľ��������ã���֧������ϰ�װ�д����֣�64���������Ӷ��֣�6��������Լ������֣�65���ڲ�����ĸ������֣�64�������ϣ�����˫���֣�63�����Ϸ�������ǰ��Գ����õ�ͬ������B��5������ͬ������B��5�����ڶ�ͨ��ͬ�����δ���51����ͬ������A��59���������ӣ�λ��ǰ���ͬ������B��5�����������������Ħ��Ƭ��56������צB��55���͵�Ƭ��57����λ�ں���ͬ������B��5�����������������Ħ��Ƭ��56������צA��54���͵�Ƭ��57����������צB��55���ͼ�צA��54��������ͬ������B��5��֮�䣬�Ҽ�צB��55����˫���֣�63����༬�ݵ�λ�����Ӧ����צA��54����˫���֣�63���ڲ༬�ݵ�λ�����Ӧ��������צB��55���ͼ�צA��54�����Ϸ��ֱ����е����B��52���͵����A��53�����������֣�66���������֣�65��ͬ����������ϰ�װ���ϸˣ�68���������ϸˣ�68�����¶���ϰ�װ�е����67����
Ҫ��
1.һ�ֿ�ʵ��������ͣ����ģʽ�IJ��ٿɵ���������װ�ã����������ڣ�������װ�ܣ�1����������װ�ܣ�1����ǰ����ϰ�װ����������15������������Գ����л��ǣ�3�����������ǣ�3��������ˮƽ���õ��ᣨ46���������ᣨ46�������������������д����а壨4����ͬ������A��59�����Ӷ��֣�6����˫���֣�63���������֣�65�������֣�66�����ᣨ46�����ڶ����й�����У�47�������������а壨4�����϶�ͨ���ڶ��̶���˨��58����ͬ������ A��59�����ӣ�����ͬ������A��59����Ӷ��֣�6��֮��������У�45�����Ӷ��֣�6�����ڲ��¶�������ǰ��Գ����õĵ���B��62���͵���A��61������������B��62���͵���A��61���������а壨4�����϶���λ���У�����˫���֣�63�����в���ϰ�װ�д����̶ֹ�����69�������������̶ֹ�����69�������������ᣨ46������Բ������Բ�����������������������ĸ�֧�ˣ�֧����Բ�����ľ��������ã���֧������ϰ�װ�д����֣�64���������Ӷ��֣�6��������Լ������֣�65���ڲ�����ĸ������֣�64�������ϣ�����˫���֣�63�����Ϸ�������ǰ��Գ����õ�ͬ������B��5������ͬ������B��5�����ڶ�ͨ��ͬ�����δ���51����ͬ������A��59���������ӣ�λ��ǰ���ͬ������B��5�����������������Ħ��Ƭ��56������צB��55���͵�Ƭ��57����λ�ں���ͬ������B��5�����������������Ħ��Ƭ��56������צA��54���͵�Ƭ��57����������צB��55���ͼ�צA��54��������ͬ������B��5��֮�䣬�Ҽ�צB��55����˫���֣�63����༬�ݵ�λ�����Ӧ����צA��54����˫���֣�63���ڲ༬�ݵ�λ�����Ӧ��������צB��55���ͼ�צA��54�����Ϸ��ֱ����е����B��52���͵����A��53�����������֣�66���������֣�65��ͬ����������ϰ�װ���ϸˣ�68���������ϸˣ�68�����¶���ϰ�װ�е����67����
2.����Ȩ��Ҫ��1������һ�ֿ�ʵ��������ͣ����ģʽ�IJ��ٿɵ���������װ�ã����������ڣ����������а壨4�����¶�ͨ����һ�̶���˨��41����װ��ϥ�ؽڹ̶�����42��������ϥ�ؽڹ̶�����42�����ڴ����а壨4�����¶��ڲࡣ
3.����Ȩ��Ҫ��2������һ�ֿ�ʵ��������ͣ����ģʽ�IJ��ٿɵ���������װ�ã����������ڣ����������а壨4�����¶�ͨ��������Ȧ��43�������б�Ĥѹ����������44����
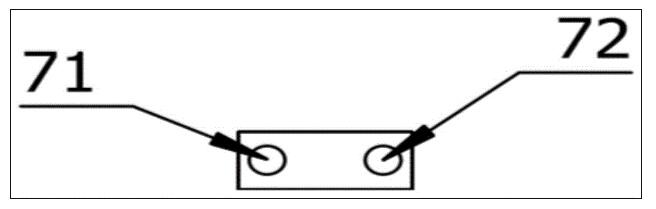
4.����Ȩ��Ҫ��3������һ�ֿ�ʵ��������ͣ����ģʽ�IJ��ٿɵ���������װ�ã����������ڣ�������װ�ܣ�1���Ķ�������е�Դģ�飨12��������ģ�飨13���;�������11������������ģ�飨13����������������14���Ϳ�����壨7��������������壨7�������е�����ʾ����16������Դ���أ�17�������ٵ�����ť��18��������ģʽ������71�����ʵ�ģʽ������72����
5.����Ȩ��Ҫ��4������һ�ֿ�ʵ��������ͣ����ģʽ�IJ��ٿɵ���������װ�ã����������ڣ��������ǣ�2���ڲ���ϰ�װ������������Ļ��ǣ�3�������ǣ�3�����¶˺�ǰ��ֱ����д�����A��32���ʹ�����B��31����
6.����Ȩ��Ҫ��4������һ�ֿ�ʵ��������ͣ����ģʽ�IJ��ٿɵ���������װ�ã����������ڣ�������������11������������14����������ʾ����16�������ٵ�����ť��18����������B��31����������A��32������Ĥѹ����������44���������B��52���������A��53���͵����67���������ģ�飨13�����ӡ�
һ�ֿ�ʵ��������ͣ����ģʽ�IJ��ٿɵ���������װ��
��������
�������漰��������װ�ü������������漰һ�ֿ�ʵ��������ͣ����ģʽ�IJ��ٿɵ���������װ�á�
��������
�ҹ������˿��������Ӻܿ죬����������ҵ��չ���Ƚ��ͺ��������ڳ�ʱ������ʱ����Ҫ���Ĵ�������������֫��������������������ʱ�����ߵ���Ҫԭ����ֱ�ӵ��������˵Ļ��Χ�ܵ����ơ�
Ŀǰ�����������߹����У�ͨ��ʹ��������Ϊ֧���︨�����ߣ�ͨ����֫���������ȵĹ�ͬ�������ֲ���֫�����IJ��㣬û�дӸ����Ͻ����������̧֫�����������⡣
��ǰ�г�����һ������������е���� “������”�������п��������õ�����ѹ������ƣ�����һ���̶���ʵ�ָ���̧�ȹ��ܣ����䴢��������������������ʵ�֡�ͬʱ������������еҲ����һ�������⣬���������ܵ��ͷ��ş̣̇�ȵ�����֮�������ת������Ч�����⡣�ӱ�������˵��������������е����ʵ���˸���������̧�ȵĶ�����̧�ȵ�����������������ã���ʵ���ϸ��������������˵����ܡ���ˣ�����������еδ�ܽ�������˳����˶�������������⡣Ϊ���ܸ��ý��������⣬���DZ������粹�������������������ߡ�
��������“��������е”��Ҫ�ɽ����ͺϽ�Ȳ��Ϲ��ɣ����õ������ͨ����е����ʵ�ֶ��������Ȳ��ĸ������á��籾��Ƽ���ҵ�����Honda���и�������Ȼ�ܽ�������۵����⣬���Դ���һ�������⡣һ���棬װ����Ը��ӣ�ƫ�أ����Ҹ���������е��Ҫ���ڰ���ʹ���߽��в���ѵ�������dz�ʱ�䴩�����沽�У���һ���棬ʹ�����ֶ�������װ�ó���Ҫǰ����Ӧ��ѵ������������ʹ�����һ�������ѣ��̶���ģʽ��������ʱ��ʱͣ����·ϰ�߲���������⣬ʹ�úͲ���Ҳ��ԱȽϷ���������“��������е”������豸�۸������������۸�dz��ߣ���ͨ���������Գе������籾��Ƽ���ҵ�����Honda���и������ձ�������ʽ�ij��ۣ�ÿ��ƻ�Ͷ������450̨��ÿ�����Ϊ45000�ң�Լ2980����ң�������Լ��Ϊ36���£����øߴ�11����������ң�����ʹ�÷��úܸߣ��������Դ������������ƹ�Ӧ�á���ˣ������迪����һЩ��������ȫ�ɿ����۸�����Ļ�еװ�����ڸ������������ߣ����������˻��Χ���ӻ���������֫������˥������ÿһλ���˶�������ð��ġ����ġ����ģ����ܽ������١������Ҹ����ꡣ
��������ԭ����������˵���������������˥������������֫����˥������������������ͣ����·������������һ�ֿ�ʵ��������ͣ����ģʽ�����ٿɵ��ڵ���������װ��,������ʹ�ø�װ������ʱ���Ȳ�����Ҳ�ܵõ�һ���Ķ������������������ճ������ʱ�����ߵ�����
��������
Ϊ����������⣬������������һ�ֿ�ʵ��������ͣ����ģʽ�IJ��ٿɵ���������װ�ã����������Ⱥ�峤ʱ�������������⣬����������ͣ�����ٿɵ�����ȫ�ɿ����ɱ��͵��ŵ㡣
���巽�����£�
һ�ֿ�ʵ��������ͣ����ģʽ�IJ��ٿɵ���������װ�ã����������ڣ�������װ�ܣ�������װ�ܵ�ǰ����ϰ�װ������������������Գ����л��ǣ���������������ˮƽ���õ��ᣬ�����������������������д����а塢ͬ������A���Ӷ��֡�˫���֡������ֺ����֣�����ڶ����й�����У����������а���϶�ͨ���ڶ��̶���˨��ͬ������ A���ӣ�����ͬ������A��Ӷ���֮��������У��Ӷ��ֵ��ڲ��¶�������ǰ��Գ����õĵ���B�͵���A����������B�͵���A�������а���϶���λ���У�����˫���ֵ��в���ϰ�װ�д����̶ֹ��������������̶ֹ�������������������Բ������Բ�����������������������ĸ�֧�ˣ�֧����Բ�����ľ��������ã���֧������ϰ�װ�д����֣������Ӷ��ֵ�����Լ��������ڲ�����ĸ������������ϣ�����˫���ֵ��Ϸ�������ǰ��Գ����õ�ͬ������B����ͬ������B���ڶ�ͨ��ͬ�����δ���ͬ������A�������ӣ�λ��ǰ���ͬ������B���������������Ħ��Ƭ����צB�͵�Ƭ��λ�ں���ͬ������B���������������Ħ��Ƭ����צA�͵�Ƭ��������צB�ͼ�צA������ͬ������B֮�䣬�Ҽ�צB��˫������༬�ݵ�λ�����Ӧ����צA��˫�����ڲ༬�ݵ�λ�����Ӧ��������צB�ͼ�צA���Ϸ��ֱ����е����B�͵����A������������������ͬ����������ϰ�װ���ϸˣ������ϸ˵��¶���ϰ�װ�е����
��Ϊ�������Ľ�һ���Ľ������������а���¶�ͨ����һ�̶���˨��װ��ϥ�ؽڹ̶���������ϥ�ؽڹ̶������ڴ����а���¶��ڲࡣ
��Ϊ�������Ľ�һ���Ľ������������а���¶�ͨ��������Ȧ�����б�Ĥѹ����������
��Ϊ�������Ľ�һ���Ľ���������װ�ܵĶ�������е�Դģ�顢����ģ��;���������������ģ���������������Ϳ�����壬����������������е�����ʾ������Դ���ء����ٵ�����ť������ģʽ�������ʵ�ģʽ������
��Ϊ�������Ľ�һ���Ľ������������ڲ���ϰ�װ������������Ļ��ǣ����ǵ��¶˺�ǰ��ֱ����д�����A�ʹ�����B��
��Ϊ�������Ľ�һ���Ľ�����������������������������ʾ�������ٵ�����ť��������B��������A����Ĥѹ���������������B�������A�͵���������ģ�����ӡ�
������������Ч�����ڣ�
1������˻�е�����Ϳ��Ƽ��������ٿɵ�������ǰ����Ӧ��ѵ����
2���ɽϺõ���Ӧ������������ͣ����·��ʽ��
3��װ�õ�������Ԫ�����ֹ���ʱ������ϵͳ�Զ��ϵ磬�Ҷϵ�����´����а崦������ת��״̬������Ч��ֹ��������ķ�����ͬʱװ�����ж��ر�������ȫ�ɿ������н�ǿ���ƹ���Ӧ�ü�ֵ��
4��������������ģʽ����Ϊʹ�����ڲ�ͬ���������ṩ������
5�����г�ͬ���Ʒ�Ƚϣ��۸������ʵ����ǿ��
6��Ҳ������������ҽ�ơ����á������ȶ����ҵ��ǰ��ʮ�ֹ�����
��ͼ˵��
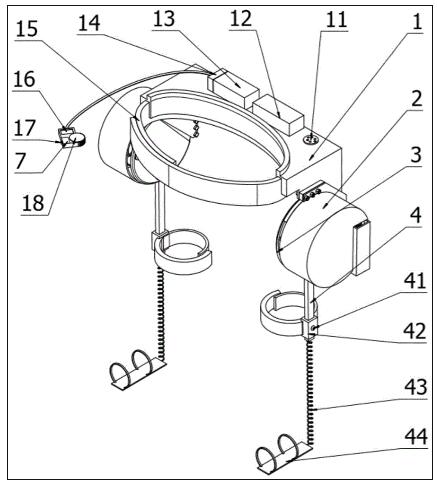
ͼ1Ϊ������һ�ֿ�ʵ��������ͣ����ģʽ�IJ��ٿɵ���������װ�õĽṹʾ��ͼ��
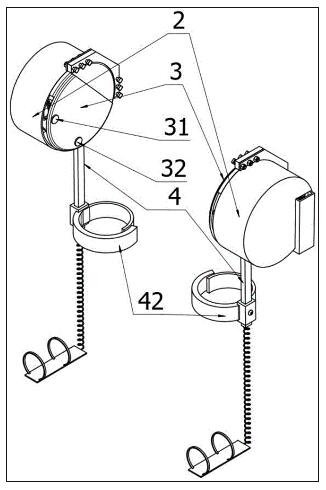
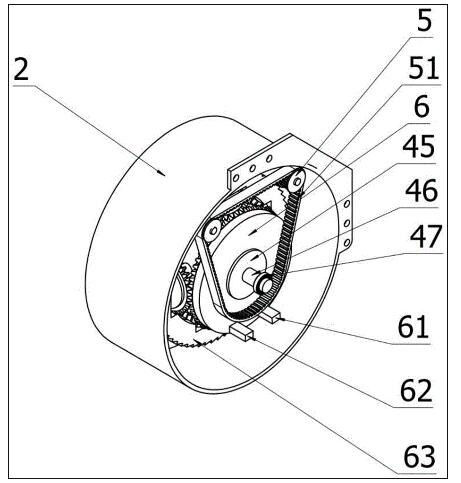
ͼ2Ϊͼ1��ȥ����װ�ܺ���������Ľṹʾ��ͼ��
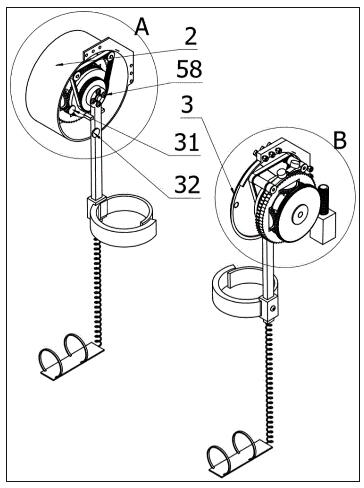
ͼ3Ϊͼ2��ȥ���ֻ��ǡ��Ҳ����Ǻ�Ľṹʾ��ͼ��
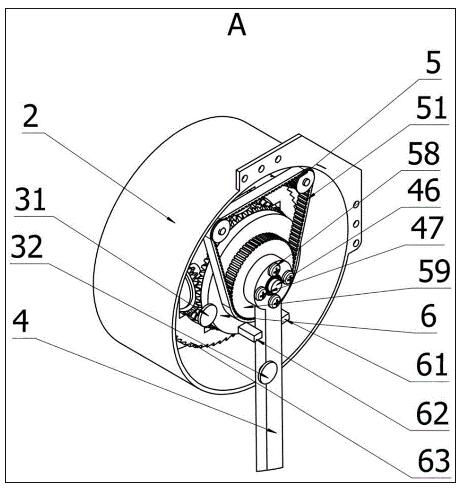
ͼ4Ϊͼ3��A�ľֲ��Ŵ�ͼ��
ͼ5Ϊͼ4��ȥ�������а���ͬ������A�Ľṹʾ��ͼ��
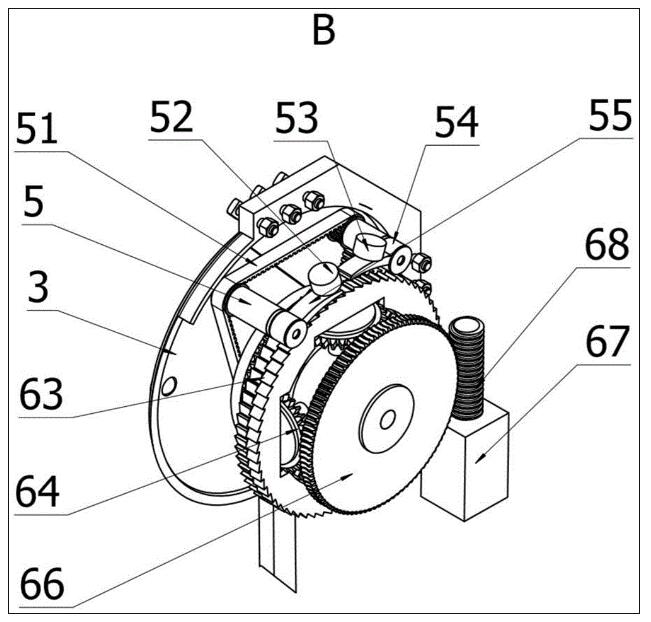
ͼ6Ϊͼ3��B�ľֲ��Ŵ�ͼ��
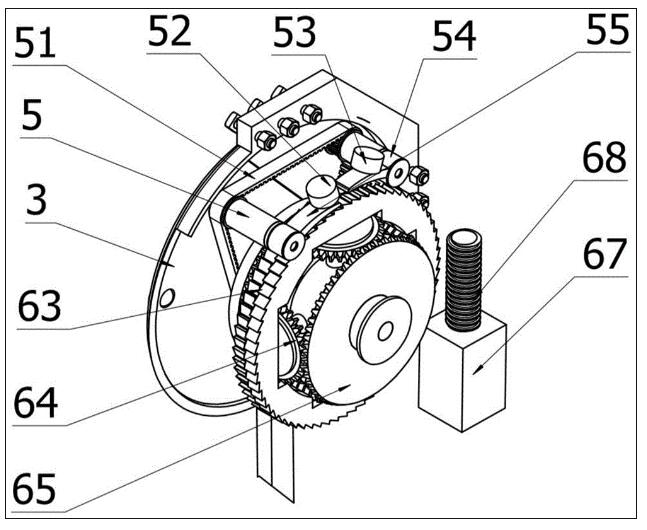
ͼ7Ϊͼ6��ȥ�����ֺ�Ľṹʾ��ͼ��
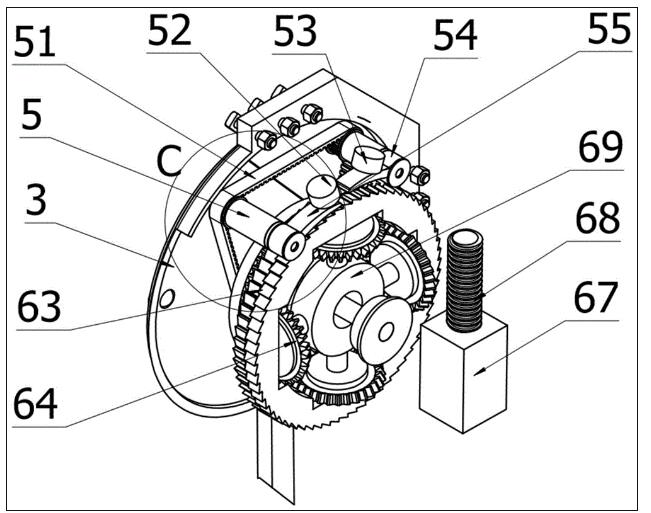
ͼ8Ϊͼ7��ȥ�������ֺ�Ľṹʾ��ͼ��
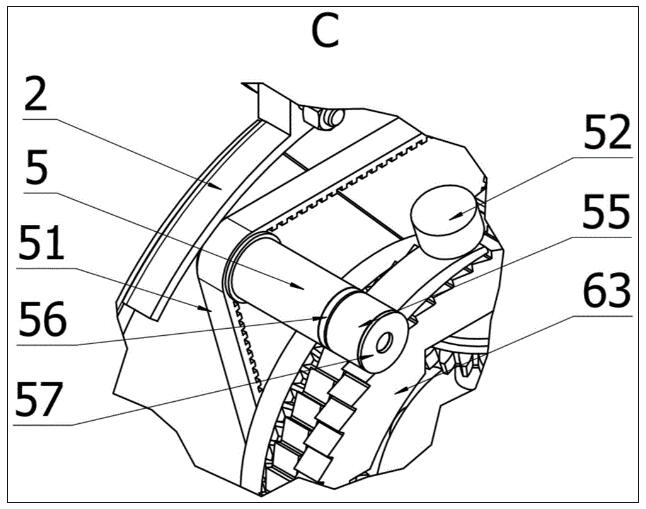
ͼ9Ϊͼ8��C�ľֲ��Ŵ�ͼ��
ͼ10Ϊ�������Ľṹʾ��ͼ��
��ͼ����б���
1-��װ�ܣ�11-��������12-��Դģ�飬13-����ģ�飬14-��������15-��������16-������ʾ����17-��Դ���أ�18-���ٵ�����ť��2-���ǣ�3-���ǣ�31-������B��32-������A��4-�����а壬41-��һ�̶���˨��42-ϥ�ؽڹ̶�����43-������Ȧ��44-��Ĥѹ����������45-��У�46-�ᣬ47-������У�5-ͬ������B��51-ͬ�����δ���52-�����B��53-�����A��54-��צA��55-��צB��56-��Ħ��Ƭ��57-��Ƭ��58-�ڶ��̶���˨��59-ͬ������A��6-�Ӷ��֣�61-����A��62-����B��63-˫���֣�64-�����֣�65-�����֣�66-���֣�67-�����68-�ϸˣ�69-�����̶ֹ�����7-������壬71-����ģʽ������72-�ʵ�ģʽ������
����ʵʩ��ʽ
�����ϸ�ͼ�;���ʵʩ��ʽ����һ��������������Ӧ������������ʵʩ��ʽ������˵�������������������Ʊ������ķ�Χ����Ҫ˵�����ǣ�����������ʹ�õĴ���“ǰ”��“��”��“��”��“��”��“��”��“��”ָ���Ǹ�ͼ�еķ�����“��”��“��”�ֱ�ָ���dz����Զ���ض������������ĵķ���
��ͼ��ʾ��һ�ֿ�ʵ��������ͣ����ģʽ�IJ��ٿɵ���������װ�ã�������װ�ܣ�������װ�ܵ�ǰ����ϰ�װ������������������Գ����л��ǣ���������������ˮƽ���õ��ᣬ�����������������������д����а塢ͬ������A���Ӷ��֡�˫���֡������ֺ����֣�����ڶ����й�����У����������а���϶�ͨ���ڶ��̶���˨��ͬ������A���ӣ�����ͬ������A��Ӷ���֮��������У��Ӷ��ֵ��ڲ��¶�������ǰ��Գ����õĵ���B�͵���A����������B�͵���A�������а���϶���λ���У�����˫���ֵ��в���ϰ�װ�д����̶ֹ��������������̶ֹ�������������������Բ������Բ�����������������������ĸ�֧�ˣ�֧����Բ�����ľ��������ã���֧������ϰ�װ�д����֣������Ӷ��ֵ�����Լ��������ڲ�����ĸ������������ϣ�����˫���ֵ��Ϸ�������ǰ��Գ����õ�ͬ������B����ͬ������B���ڶ�ͨ��ͬ�����δ���ͬ������A�������ӣ�λ��ǰ���ͬ������B���������������Ħ��Ƭ����צB�͵�Ƭ��λ�ں���ͬ������B���������������Ħ��Ƭ����צA�͵�Ƭ��������צB�ͼ�צA������ͬ������B֮�䣬�Ҽ�צB��˫������༬�ݵ�λ�����Ӧ����צA��˫�����ڲ༬�ݵ�λ�����Ӧ��������צB�ͼ�צA���Ϸ��ֱ����е����B�͵����A������������������ͬ����������ϰ�װ���ϸˣ������ϸ˵��¶���ϰ�װ�е����
�ڱ�ʵʩ���У����������а���¶�ͨ����һ�̶���˨��װ��ϥ�ؽڹ̶���������ϥ�ؽڹ̶������ڴ����а���¶��ڲࡣ
�ڱ�ʵʩ���У����������а���¶�ͨ��������Ȧ�����б�Ĥѹ����������
�ڱ�ʵʩ���У�������װ�ܵĶ�������е�Դģ�顢����ģ��;���������������ģ���������������Ϳ�����壬����������������е�����ʾ������Դ���ء����ٵ�����ť������ģʽ�������ʵ�ģʽ������
�ڱ�ʵʩ���У����������ڲ���ϰ�װ������������Ļ��ǣ����ǵ��¶˺�ǰ��ֱ����д�����A�ʹ�����B��
�ڱ�ʵʩ���У���������������������������ʾ�������ٵ�����ť��������B��������A����Ĥѹ���������������B�������A�͵���������ģ�����ӡ�
�������Ĺ���ԭ����ʹ�÷������£�
1�����µ�Դ����17��װ��ͨ�硣�����A53������B52�õ�һ˲�����ϼ�צA54����צB55��ʹ������צ��˫����63���ڷ���״̬������Ħ��Ƭ56�������£���צA54����צB55��˫����63���ַ���״̬��
2���ڿ������7����������ģʽ����71���ʵ�ģʽ����72��ѡ���ʵ�ģʽ����72��
3�����ڲ��ٵ�����ť18���ı���67ת�٣�ʵ�ֲ��ٵ��ڡ�
4�����ң��ȴ��������а�4��ǰת����ͬ������A59��ͬ�����δ�51��������ͬ������B5˳ʱ��ת��������Ħ��Ƭ56�������£���צB55˳ʱ��ת������������ʱ����������צA54�����뼬�ַ��룬�������а�4������ֱ����һ���Ƕ�ʱʱ��������A32��ѹ�����ģ��13�����źţ����67��ת���ϸ�68��������66��ʱ��ת����˫����63����ʱ��ת�������ƣ�������צB55����������66��������65��������64���Ӷ���6��������A61˳ʱ���ƶ������а�4��ǰת����ʵ��̧�ȶ�������������ǰת���ٶȴ��ڵ��67�����ٶ�ʱ��������ͬ�����δ�51˳ʱ��ת������Ħ���������¼�צ��ʱ����������״̬���岻�䣬��֤���67�ɼ�������������ǰ�˶�����ʵ�ְڶ�������
5���ŵ����б�Ĥѹ��������44 ����Ĥѹ��������44Ϊ����״��ȷ���˽��ƻ�Ÿ����غ��źţ��������ң��Ŵ��غ�Ĥѹ��������44��ѹ�����ģ��13�����źţ����67��ת�������B52�õ����ϼ�צB55��ʹ����˫����63���룬ͬʱ�ϸ�68��������66˳ʱ��ת����˫����63˳ʱ��ת���������ң��ȴ��������а�4����˶����������ֱ�������ͬ������A����������ͬ������B5��ʱ��ת��������Ħ��Ƭ56�������£���צB55��ʱ��ת�����뼬�ַ��룬��צA54��ʱ��ת��������˳ʱ������������66��������65��������64���Ӷ���6��������B62��ʱ�ƶ������а�4���ת�������������ת���ٶȴ��ڵ��67�����ٶ�ʱ��������ͬ�����δ�51��ʱ��ת������Ħ���������±��ּ�צ��ʱ����������״̬���岻�䣬��֤���67�ɼ���������������˶�����ʵ��֧��������
6�������а�4���ת����ֱ����ʱ��������A32��ѹ�����ģ��13�����źţ����67ֹͣת���������а�4�ƶ�����A61��������˶�����ʱ���ֱ�˳ʱ��������״̬���䡣������64���Ӷ���6��˫����63����������ʱ��ת�����������⸺�ء�
7�������ң������ת�������ǶȺ������������ƣ���ǰת��ʱ�������а�4�ӵ���A61��ǰת��������B62���ڴ˹����У�ͬ������A59��ͬ�����δ�51��������ͬ������B5˳ʱ��ת���������ֲ�ת����������Ħ��Ƭ56�������£���צA54˳ʱ��ת�����뼬�֣���צB55˳ʱ��ת����������ʱ����������ʱ�����а�4�ƶ�����B��ǰ�˶���������64���Ӷ���6��˫����63��������˳ʱ��ת�����������⸺�ء�
8���ң������ظ�4��5��6��7����ʵ�������ʵǡ�
9����ѡ������ģʽʱ����5�����˽Ŵ��غ�Ĥѹ��������44��ѹ�����ģ��13�����źţ������B52�õ����ϼ�צB55��ͬʱ���67��תһȦ��ֹͣ�Ա�֤���ּ�צ�ɹ����룬������64���Ӷ���6��˫����63��������65ת���������ڹ�������������ǰ�ƣ����ٵ��67����ʱ������ܺġ������������ʵ�ģʽ��ͬ��
10�����µ�Դ����17��װ�öϵ�ֹͣ������
11�����67���ϻ����Ԫ�����ϣ�������11����������ϵͳ�Զ��жϵ�Դ�����ϵ�ʱ�����ң�����ǰ�˶���ͬ������A59��ͬ�����δ�51��������ͬ������B5˳ʱ��ת���������ֲ�ת����������Ħ��Ƭ56�������£���צA54˳ʱ��ת�����뼬�֣���צB55˳ʱ��ת����������ʱ����������ʱ�����а�4�ƶ�����B62��ǰ�˶�����צ����ʱ������״̬���䣬������64���Ӷ���6��˫����63��������65˳ʱ��ת�����������⸺�ء������ң�����ǰ�˶������Ƕȣ������������ƣ�������������ֱ�����˶�ʱ�������а�ӵ���B62�˶�������A61����ʱͬ������A59��ͬ�����δ�51��������ͬ������B5��ʱ��ת���������ֲ�ת����������Ħ��Ƭ56�������£���צA54��ʱ��ת�����뼬�֣���צB55��ʱ��ת����������ʱ����������ʱ�����а�4�ƶ�����A61����˶�����צ��˳ʱ������״̬���䣬������64���Ӷ���6��˫����63��������65˳ʱ��ת�����༸�����⸺�ء�
12���ϵ�����µ����ң�������˶������Ƕȣ������������ƣ�����ǰ�˶�ʱ��11��ԭ����ͬ��
13��ʹ���߿ɴӵ�����ʾ���е�֪��Դģ��12ʣ�����������������10%ʱ��������11������
14��װ�����ж��ر��������ŵ�������Ĥѹ��������44ͬʱ��ʱ�������а�4����˶���������B31λ�ã���֤ʹ���߰�ȫ��
�����������������ļ����ֶβ�����������ʵʩ��ʽ�������ļ����ֶΣ������������ϼ������������������ɵļ���������

Copyright © ����۴�ݸ���ͬ����������˾ 2007-2022 All Rights Reserved.
�绰��4006-574-123/0574-27834692 ���棺0574-27834691
��ַ���㽭ʡ������۴������ɽ������Ŵ彪��·39-2 E-Mail:sales@belt-pulley.com
��ICP��09102982�� ���湫˾���粿�ṩ����֧�� �㹫������33021202003319��
�绰��4006-574-123/0574-27834692 ���棺0574-27834691
��ַ���㽭ʡ������۴������ɽ������Ŵ彪��·39-2 E-Mail:sales@belt-pulley.com
��ICP��09102982�� ���湫˾���粿�ṩ����֧�� �㹫������33021202003319��