产品搜索
当前位置:首页->全自动拆包机
全自动拆包机
【申请公布号 :CN112027262A;申请权利人:岱纳包装(天津)有限公司;发明设计人: 潘玉军; 吴文胜; 邓永光; 周祖忠;】
摘要:
本发明涉及拆包装置技术领域,尤其涉及一种全自动拆包机,包括升降机、若干套独立机架以及分别安装在独立机架上的空袋处理箱、吹塑材料箱、空袋支撑架、旋转圆切刀、移动框架和爪带排钩机构;在若干套独立机架的底部之间设有两排钢轨,两排钢轨之间设有升降机移动同步带,同步带有设置在机架底部的同步电机驱动,所述升降机底部两侧与所述钢轨滑动配合,升降机的底部与同步带通过连接块齿板固定,同步带带动升降机在每套独立机架下部传送移动。本装置能够实现自动抓取、破袋加料和收袋全过程,替代了人工,一次性可以对升降平台上的多袋原料进行抓取,大大提高了工作效率。
主权项:
1.一种全自动拆包机,其特征在于:包括升降机、若干套独立机架以及分别安装在独立机架上的空袋处理箱、吹塑材料箱、空袋支撑架、旋转圆切刀、移动框架和爪带排钩机构;在若干套独立机架的底部之间设有两排钢轨,两排钢轨之间设有升降机移动同步带,同步带由设置在机架底部的同步电机驱动,所述升降机底部两侧与所述钢轨滑动配合,升降机的底部与同步带通过连接块固定,同步带带动升降机在每套独立机架的下部移动;所述空袋处理箱固定在机架的一侧,空袋处理箱顶部低于机架顶部,所述吹塑材料箱固定在机架内,所述空袋支撑架位于所述吹塑材料箱的上方并固定在所述机架上,空袋支撑架由若干根弧形的弯管构成,弧形弯管等间距设置,其一端固定在机架上,另一端通过支撑架轴承安装在旋转圆切刀的刀轴上,所述旋转圆切刀为若干片,间隔固定在刀轴上,所述支撑架轴承位于相邻的两片旋转圆切刀之间,所述刀轴两端通过轴承安装在机架上并由刀轴电机驱动转动;所述机架的顶部两侧设有导轨,导轨延伸到空袋支撑架的两侧且导轨的水平高度高于空袋支撑架,所述移动框架与所述导轨滑动配合并通过移动框架电机带动移动框架在导轨上移动,当移动框架移动到空袋支撑架上方时,二者之间的距离小于排料前包装袋的厚度,移动框架向空袋处理箱方向移动的极限位置为移动框架一半位于空袋处理箱的上方,所述移动框架上设有所述爪带排钩机构。
要求:
1.一种全自动拆包机,其特征在于:包括升降机、若干套独立机架以及分别安装在独立机架上的空袋处理箱、吹塑材料箱、空袋支撑架、旋转圆切刀、移动框架和爪带排钩机构;在若干套独立机架的底部之间设有两排钢轨,两排钢轨之间设有升降机移动同步带,同步带由设置在机架底部的同步电机驱动,所述升降机底部两侧与所述钢轨滑动配合,升降机的底部与同步带通过连接块固定,同步带带动升降机在每套独立机架的下部移动;
所述空袋处理箱固定在机架的一侧,空袋处理箱顶部低于机架顶部,所述吹塑材料箱固定在机架内,所述空袋支撑架位于所述吹塑材料箱的上方并固定在所述机架上,空袋支撑架由若干根弧形的弯管构成,弧形弯管等间距设置,其一端固定在机架上,另一端通过支撑架轴承安装在旋转圆切刀的刀轴上,所述旋转圆切刀为若干片,间隔固定在刀轴上,所述支撑架轴承位于相邻的两片旋转圆切刀之间,所述刀轴两端通过轴承安装在机架上并由刀轴电机驱动转动;
所述机架的顶部两侧设有导轨,导轨延伸到空袋支撑架的两侧且导轨的水平高度高于空袋支撑架,所述移动框架与所述导轨滑动配合并通过移动框架电机带动移动框架在导轨上移动,当移动框架移动到空袋支撑架上方时,二者之间的距离小于排料前包装袋的厚度,移动框架向空袋处理箱方向移动的极限位置为移动框架一半位于空袋处理箱的上方,所述移动框架上设有所述爪带排钩机构。
2.根据权利要求1所述的全自动拆包机,其特征在于:所述爪带排钩机构包括至少两组气缸、连接杆、立杆以及排钩,所述移动框架内间隔设有若干根连接柱,两组气缸分别固定在所述移动框架的一侧,每个气缸的活塞杆上固定有一根连接杆,每根连接杆的下方间隔固定有若干个所述立杆,所述立杆的下端带有导向槽,所述排钩的上部通过销轴与所述导向槽滑动配合,所述排钩的下端位于两根连接柱之间,排钩的内侧通过铰轴与所述连接柱连接,排钩的开口方向朝向空袋处理箱的方向。
3.根据权利要求1所述的全自动拆包机,其特征在于:所述爪带排钩机构包括气缸、连接杆、立杆以及排钩,所述移动框架内间隔设有若干根连接柱,连接柱的两端通过轴承与移动框架内部连接,所述气缸通过气缸座活动连接在移动框架的一侧,每个气缸的活塞杆上铰接一根所述连接杆,所述立杆的上部通过铰轴与所述连接杆铰接,所述立杆的下部与所述连接柱固定连接,所述排钩间隔固定在所述连接柱的下方,排钩的开口方向朝向空袋处理箱的方向。
4.根据权利要求1所述的全自动拆包机,其特征在于:所述旋转圆切刀位于空袋支撑架的前端,且旋转圆切刀的顶部位置低于空袋支撑架上部的平面。
5.根据权利要求1所述的全自动拆包机,其特征在于:所述旋转圆切刀位于所述吹塑材料箱的上方,且吹塑材料箱的上部半包裹住旋转圆切刀。
6.根据权利要求2或3所述的全自动拆包机,其特征在于:单个排钩结构为一弧形的挂钩,挂钩的底部呈尖状,越往上部逐渐加宽。
全自动拆包机
技术领域
本发明涉及拆包装置技术领域,尤其涉及一种全自动拆包机。
背景技术
目前,在包装领域,吹塑包装产品所采用的原料多为树脂颗粒,针对树脂颗粒多用100公斤塑料袋包装,在使用中需要人工破袋和加料,由于每次所需要的树脂颗粒原料比较多,所以传统的这种方式就存在手工操作效率低和安全风险的问题。中国专利公开了一些自动拆包设备,如一种全自动大处理拆包机,申请号 2016210076251,其包括机架、提升机构、活动栅格介质感知机构、物料抓取机构、行走机构、破袋机构、震动机构及废袋处理机构,其未公开具体的物料抓取机构的具体结构,只是说明气缸带动转轴转动,转轴固定抓手,具体抓手怎样的抓取包装袋并未有写,包装袋抓取是否牢固直接关系到后续的工作,另外,将该结构将废袋处理机构直接设置在机架的前侧,而破袋机构设置在废袋处理机构的后侧,废袋处理机构只是写明通过驱动气缸带动拨叉转动,拨叉如何将废袋拨下来处理并未写明,所以该专利整体结构是非常不清楚的。另外,中国专利还公开了一种全自动高速卸垛拆包机,申请号 201720928462.9,其结构与第一个对比文件的结构大体相同,只不过公开了抓取机构的具体结构,该抓取结构过于复杂,并且这种结构对于大面积大体积的包装袋根本抓不起来,本身包装袋表面就很光滑,抓手根本无法牢固的进行抓取,另外,这种结构又带有自动抖袋、推挑袋等装置,结构非常的复杂,第三,每次只能对上面一层进行拆包,工作效率比较低。
发明内容
本发明的目的在于克服上述技术的不足,而提供一种全自动拆包机。
本发明为实现上述目的,采用以下技术方案:一种全自动拆包机,其特征在于:包括升降机、若干套独立机架以及分别安装在独立机架上的空袋处理箱、吹塑材料箱、空袋支撑架、旋转圆切刀、移动框架和爪带排钩机构;在若干套独立机架的底部之间设有两排钢轨,两排钢轨之间设有升降机移动同步带,同步带由设置在机架底部的同步电机驱动,所述升降机底部两侧与所述钢轨滑动配合,升降机的底部与同步带通过连接块固定,同步带带动升降机在每套独立机架的下部移动;
所述空袋处理箱固定在机架的一侧,空袋处理箱顶部低于机架顶部,所述吹塑材料箱固定在机架内,所述空袋支撑架位于所述吹塑材料箱的上方并固定在所述机架上,空袋支撑架由若干根弧形的弯管构成,弧形弯管等间距设置,其一端固定在机架上,另一端通过支撑架轴承安装在旋转圆切刀的刀轴上,所述旋转圆切刀为若干片,间隔固定在刀轴上,所述支撑架轴承位于相邻的两片旋转圆切刀之间,所述刀轴两端通过轴承安装在机架上并由刀轴电机驱动转动;
所述机架的顶部两侧设有导轨,导轨延伸到空袋支撑架的两侧且导轨的水平高度高于空袋支撑架,所述移动框架与所述导轨滑动配合并通过移动框架电机带动移动框架在导轨上移动,当移动框架移动到空袋支撑架上方时,二者之间的距离小于排料前包装袋的厚度,移动框架向空袋处理箱方向移动的极限位置为移动框架一半位于空袋处理箱的上方,所述移动框架上设有所述爪带排钩机构。
优选地,所述爪带排钩机构包括至少两组气缸、连接杆、立杆以及排钩,所述移动框架内间隔设有若干根连接柱,两组气缸分别固定在所述移动框架的一侧,每个气缸的活塞杆上固定有一根连接杆,每根连接杆的下方间隔固定有若干个所述立杆,所述立杆的下端带有导向槽,所述排钩的上部通过销轴与所述导向槽滑动配合,所述排钩的下端位于两根连接柱之间,排钩的内侧通过铰轴与所述连接柱连接,排钩的开口方向朝向空袋处理箱的方向。
优选地,所述爪带排钩机构包括气缸、连接杆、立杆以及排钩,所述移动框架内间隔设有若干根连接柱,连接柱的两端通过轴承与移动框架内部连接,所述气缸通过气缸座活动连接在移动框架的一侧,每个气缸的活塞杆上铰接一根所述连接杆,所述立杆的上部通过铰轴与所述连接杆铰接,所述立杆的下部与所述连接柱固定连接,所述排钩间隔固定在所述连接柱的下方,排钩的开口方向朝向空袋处理箱的方向。这种结构更加的简单,故障率低,一根连接柱上固定多个排钩,气缸动作一次,多个排钩都跟随转动,排钩转动角度在0到45度之间,就可以将包装袋钩起,排钩的开口方向非常重要,要朝着移动方向,否者容易脱落,越移动钩的越紧,这种结构也便于拆包完成的包装袋脱落。
优选地,所述旋转圆切刀位于空袋支撑架的前端,且旋转圆切刀的顶部位置低于空袋支撑架上部的平面。这样的好处是,包装袋在切开后,空袋支撑架前部先有个挤压,使原料快速的落入到下方。
优选地,所述旋转圆切刀位于所述吹塑材料箱的上方,且吹塑材料箱的上部半包裹住旋转圆切刀。可以有效防止原料漏出来。
优选地,单个排钩结构为一弧形的挂钩,挂钩的底部呈尖状,越往上部逐渐加宽。这种结构的好处就是可以快速的钩紧包装袋,且也可以很容易的松开包装袋。
本发明的有益效果是: 本装置对现有结构进行了改进,首先为了解决现有拆包机工作效率慢的问题,本装置通过在几台设备之间设置一台可以移动的升降机,几台设备可以同时的工作,本装置采用四台设备,如果升降机上有8层包装袋的话只需要四台设备同时工作两次就能够拆包完成,而如果就一台设备需要8次;其次,本装置去除了现有结构那些没必要的振动机构以及合理设置空袋处理箱和空袋支撑架的位置,一排旋转圆切刀将包装袋的底部切成一排条形的口,随着移动框架带着包装袋移动,原料会从空袋支撑架之间落入下方的吹塑材料箱内,由于切刀已经将包装袋下方切割很多条形口了,几乎相当于包装袋的底部全部打开了,所以无需振动机构,使设备结构更加的简单,降低了故障率;第三,更改了传统的爪带排钩机构,根据多次试验,研制出最适用于本装置的排钩,结构有简单又实用,这种排钩可以将包装袋刺穿后旋转一定角度就能够勾住,且不容易掉落,当排料完成后回转一定角度,废袋又很容易掉落。
附图说明
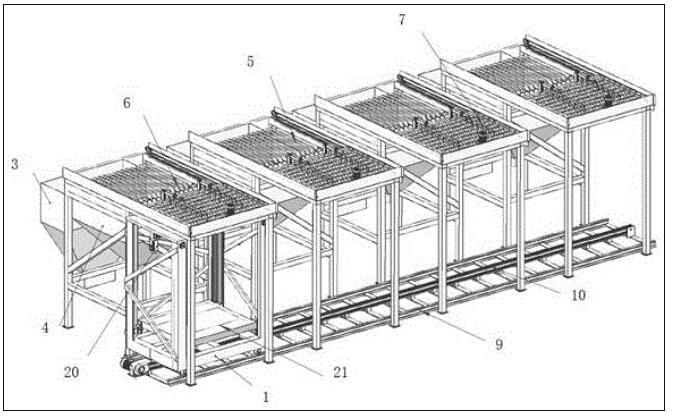
图1 是本发明的立体图;
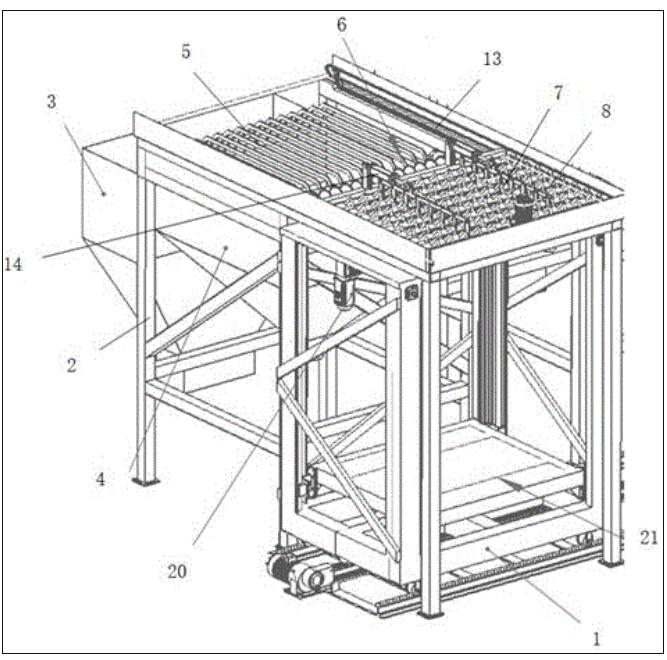
图2是本发明中单个独立机架的示意图;
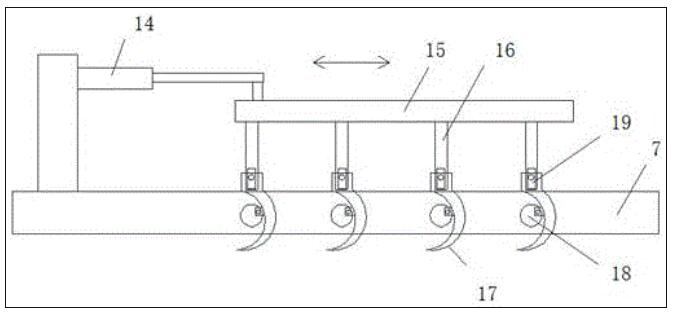
图3是本发明中一个实施例中爪带排钩机构的工作状态图;
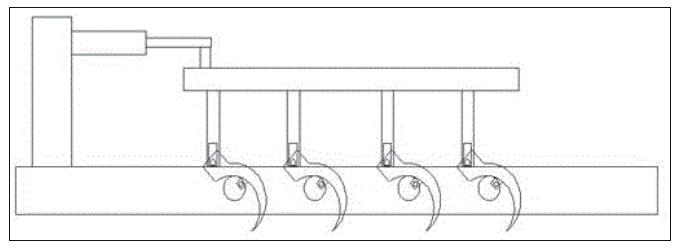
图4是图3的收回状态图;
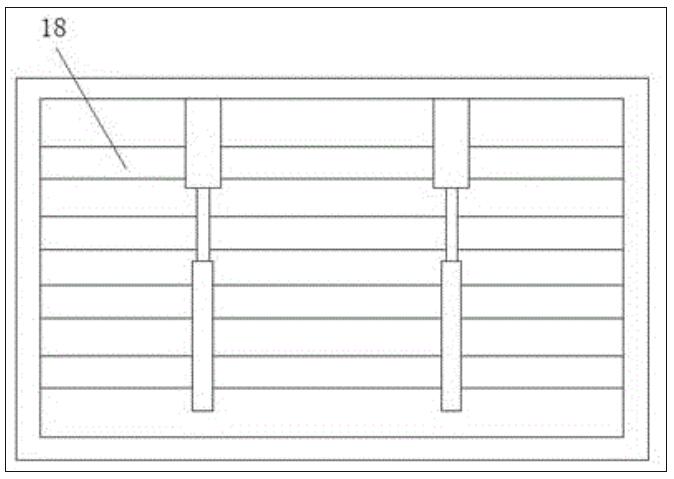
图5是图3的俯视图;
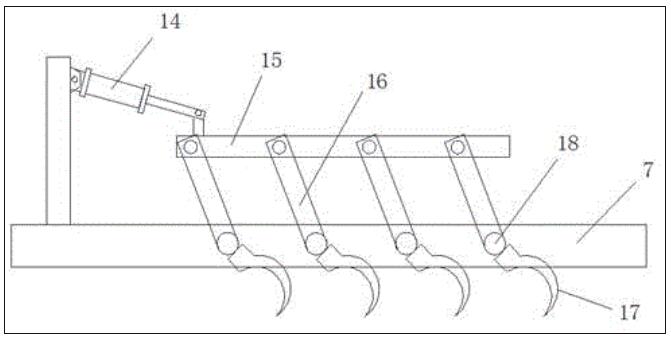
图6是本发明中第二个实施例爪带排钩机构的工作状态图;
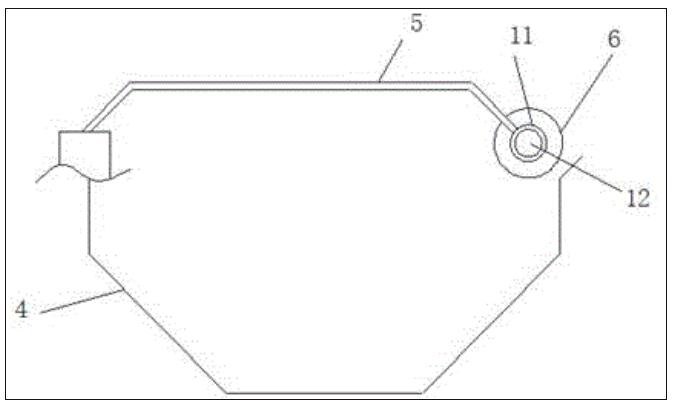
图7是本发明中吹塑材料箱、空袋支撑架和旋转圆切刀的相对位置图;
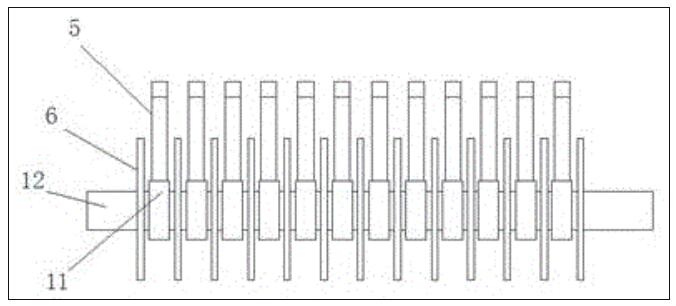
图8是本发明中旋转圆切刀和空袋支撑架的安装示意图。
具体实施方式
为了便于描述,在这里可以使用空间相对术语,如“在……之上”、“在……上方”、“在……上表面”、“上面的”等,用来描述如在图中所示的一个器或特征与其他器或特征的空间位置关系。应当理解的是,空间相对术语旨在包含除了器在图中所描述的方位之外的在使用或操作中的不同方位。例如,如果附图中的器被倒置,则描述为“在其他器或构造上方”或“在其他器或构造之上”的器之后将被定位为“在其他器或构造下方”或“在其他器或构造之下”。因而,示例性术语“在……上方”可以包括“在……上方”和“在……下方”两种方位。该器也可以其他不同方式定位(旋转90度或处于其他方位),并且对这里所使用的空间相对描述作出相应解释。
如图1和图2所示,一种全自动拆包机,包括升降机1、若干套独立机架2以及分别安装在独立机架上的空袋处理箱3、吹塑材料箱4、空袋支撑架5、旋转圆切刀6、移动框架7和爪带排钩机构8。
在若干套独立机架的底部之间设有两排钢轨9,两排钢轨之间设有升降机移动同步带10,同步带由设置在机架底部的同步电机驱动,所述升降机底部两侧与所述钢轨滑动配合,升降机的底部与同步带通过连接块齿板固定,同步带带动升降机在每套独立机架下部传送移动。
如图7和图8所示,所述空袋处理箱固定在机架的一侧,空袋处理箱顶部低于机架顶部,所述吹塑材料箱固定在机架内,吹塑材料箱与空袋处理箱相邻,原料袋内的原料排到吹塑材料箱内后,原料袋被带入到空袋处理箱收集,所述空袋支撑架位于所述吹塑材料箱的上方并固定在所述机架上,空袋支撑架由若干根弧形的弯管构成,弧形弯管等间距设置,其一端固定在机架上,另一端通过支撑架轴承11安装在旋转圆切刀的刀轴12上,所述旋转圆切刀为若干片,间隔固定在刀轴上,所述支撑架轴承位于相邻的两片旋转圆切刀之间,所述刀轴两端通过轴承安装在机架上并由刀轴电机驱动转动。旋转圆切刀的刀口朝向空袋支撑架,旋转圆切刀的下方部分位于吹塑材料箱内,这是由于将原料袋切开后,原料直接回落入到吹塑材料向内。从爪带排钩机构将原料袋爪起,向切刀方向移动,被旋转圆切刀切割出多个开口,随着爪带排钩机构向空袋支撑架方向移动逐渐的与其上方重合,原料袋底部整个被切除一个长条形口子,原料落入到吹塑材料箱内,继续向左移动就会部分位于空袋处理箱的上方,通过爪带排钩机构将空袋放入到空袋处理箱内。
本发明中,所述机架的顶部两侧设有导轨13,导轨延伸到空袋支撑架的两侧且导轨的水平高度高于空袋支撑架,所述移动框架与所述导轨滑动配合并通过移动框架电机带动移动框架在导轨上移动,当移动框架移动到空袋支撑架上方时,二者之间的距离小于排料前包装袋的厚度,移动框架移动向空袋处理箱方向移动的极限位置为移动框架一半位于空袋处理箱的上方。
所述移动框架上设有所述爪带排钩机构。如图3-5所示,所述爪带排钩机构包括至少两组气缸14、连接杆15、立杆16以及排钩17,所述移动框架内间隔设有若干根连接柱18,两组气缸分别固定在所述移动框架的一侧,每个气缸的活塞杆上固定有一根连接杆,每根连接杆的下方间隔固定有若干个所述立杆,所述立杆的下端带有导向槽19,所述排钩的上部通过销轴与所述导向槽滑动配合,所述排钩的下端位于两根连接柱之间,排钩的内侧通过铰轴与所述连接柱连接。当需要爪带排钩机构抓取原料袋时,气缸工作,连接杆向右移动,排钩围绕着连接柱旋转,排钩下方刺入到原料袋上方并旋转一定的角度钩起原料袋,由于多个排钩,所以原料袋不会掉落,再由移动框架向旋转圆切刀方向移动,切割出多个开口,使原料落入到吹塑材料箱内,之后继续向左移动,空袋支撑架支撑住原料袋,此过程也会有原料落入,由于切割的开口比较大,所以很快原料就会落入到吹塑材料箱内,移动到一侧的空袋处理箱上方后,气缸收回,排钩逆时针转动一定角度,使原料袋脱离排钩落入到空袋处理箱内。
本发明中,还有一种更简单的爪带排钩机构,如图6所示,具体所述爪带排钩机构包括气缸14、连接杆15、立杆16以及排钩17,所述移动框架内间隔设有若干根连接柱18,连接柱的两端通过轴承与移动框架内部连接,所述气缸通过气缸座活动连接在移动框架的一侧,每个气缸的活塞杆上铰接一根所述连接杆,所述立杆的上部通过铰轴与所述连接杆铰接,所述立杆的下部与所述连接柱固定连接,所述排钩间隔固定在所述连接柱的下方,排钩的开口方向朝向空袋处理箱的方向。
本发明中升降机为现有结构,由升降电机20带动升降台上下移动,实现送料的目的,所述升降机位于所述机架下方的右侧,升降机的升降台21面积与上部移动框架的面积相匹配。使用时,将原料袋摆放到升降台上,摆放多层,原料袋要对准排钩,随着升降台向上升,最上部的原料袋就会接触排钩,拆完一层原料袋后,升降台继续向上升一层,依次往复。
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。

Copyright © 宁波鄞州盖奇同步带轮有限公司 2007-2022 All Rights Reserved.
电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:浙江省宁波市鄞州区姜山镇蔡郎桥村姜南路39-2 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持 浙公网安备33021202003319号
电话:4006-574-123/0574-27834692 传真:0574-27834691
地址:浙江省宁波市鄞州区姜山镇蔡郎桥村姜南路39-2 E-Mail:sales@belt-pulley.com
浙ICP备09102982号 盖奇公司网络部提供技术支持 浙公网安备33021202003319号